
分选设备的控制方法及分选设备.pdf

淑然****by

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
分选设备的控制方法及分选设备.pdf
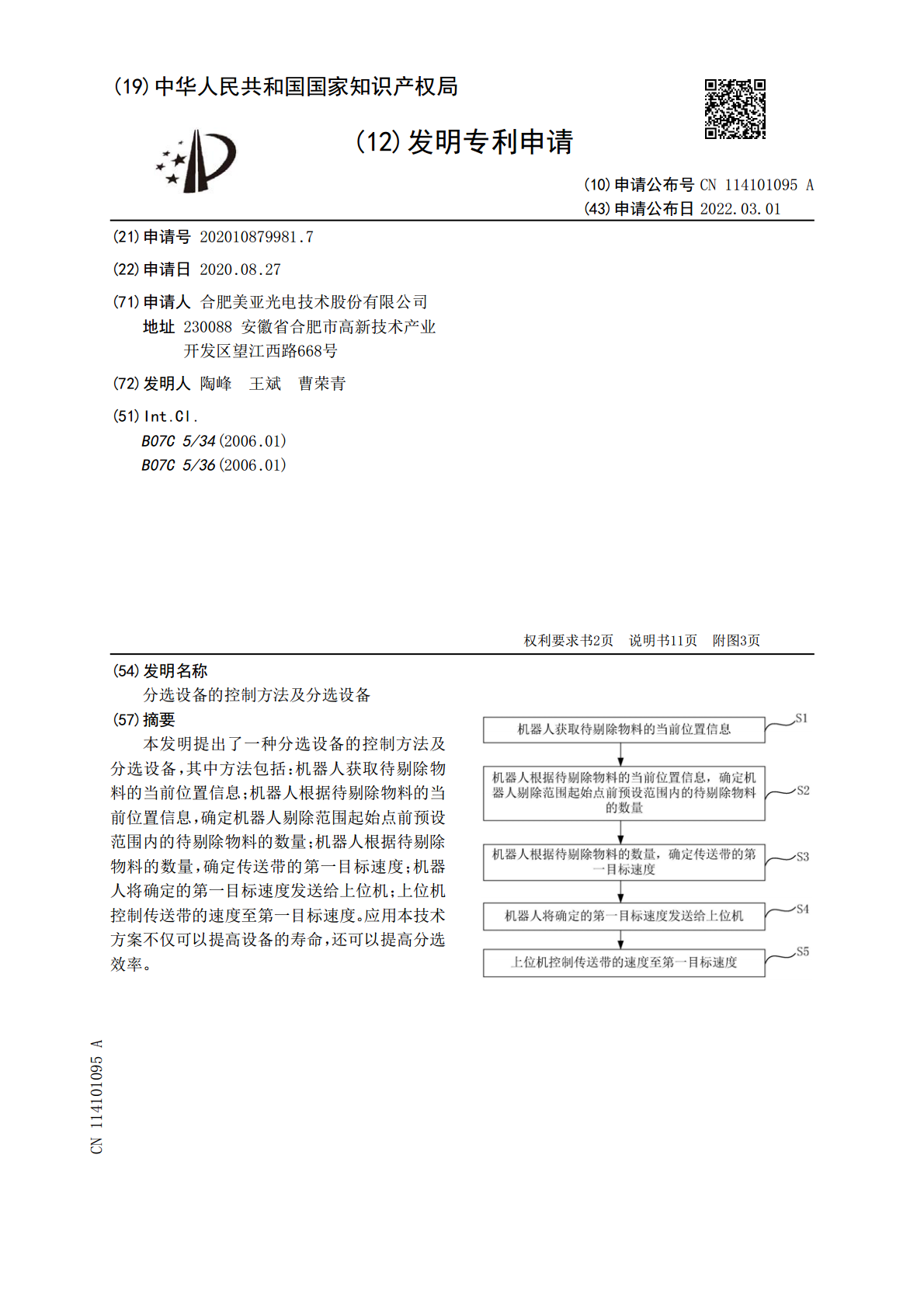
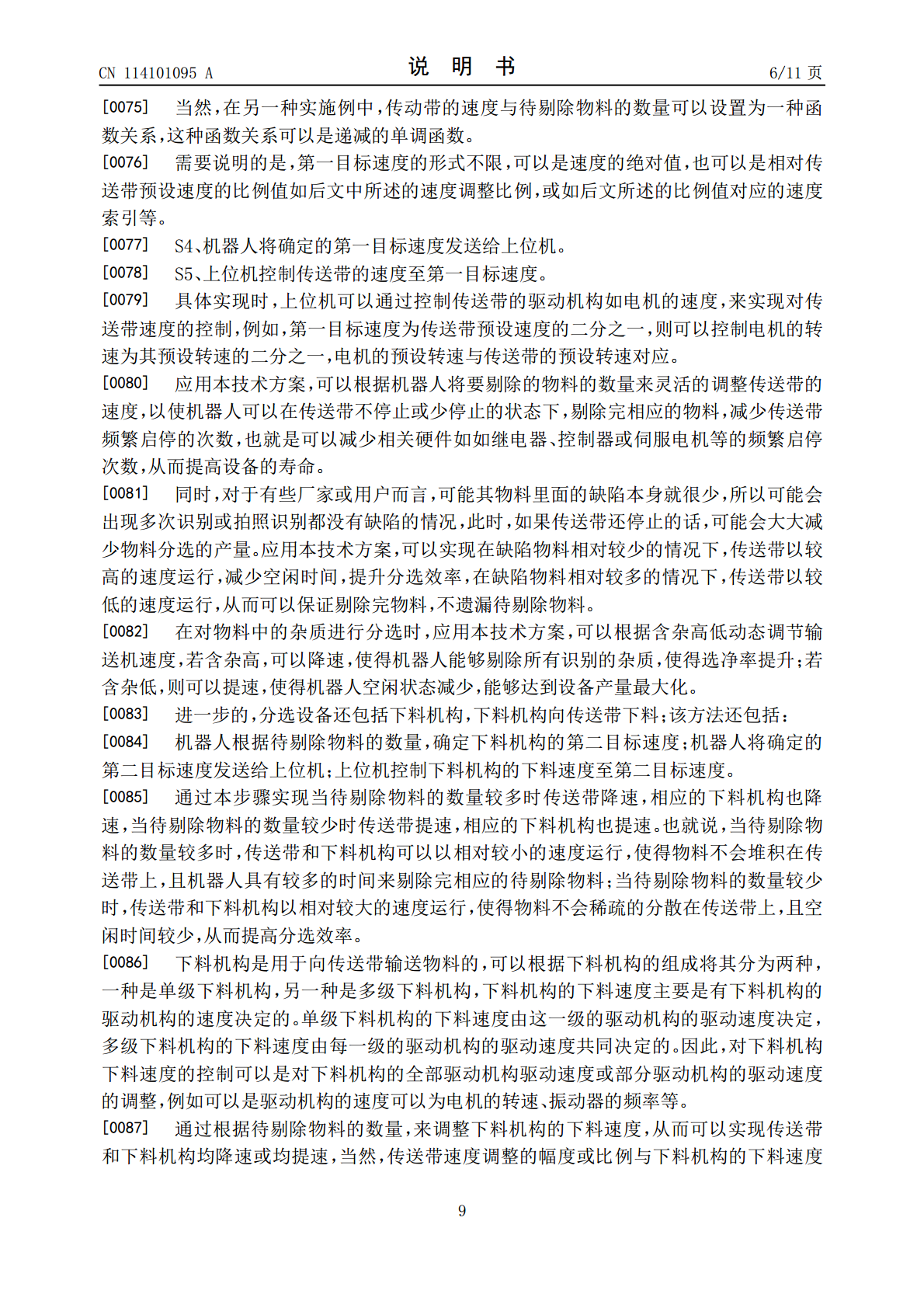
本发明提出了一种分选设备的控制方法及分选设备,其中方法包括:机器人获取待剔除物料的当前位置信息;机器人根据待剔除物料的当前位置信息,确定机器人剔除范围起始点前预设范围内的待剔除物料的数量;机器人根据待剔除物料的数量,确定传送带的第一目标速度;机器人将确定的第一目标速度发送给上位机;上位机控制传送带的速度至第一目标速度。应用本技术方案不仅可以提高设备的寿命,还可以提高分选效率。
种苗智能分选设备及分选方法.pdf
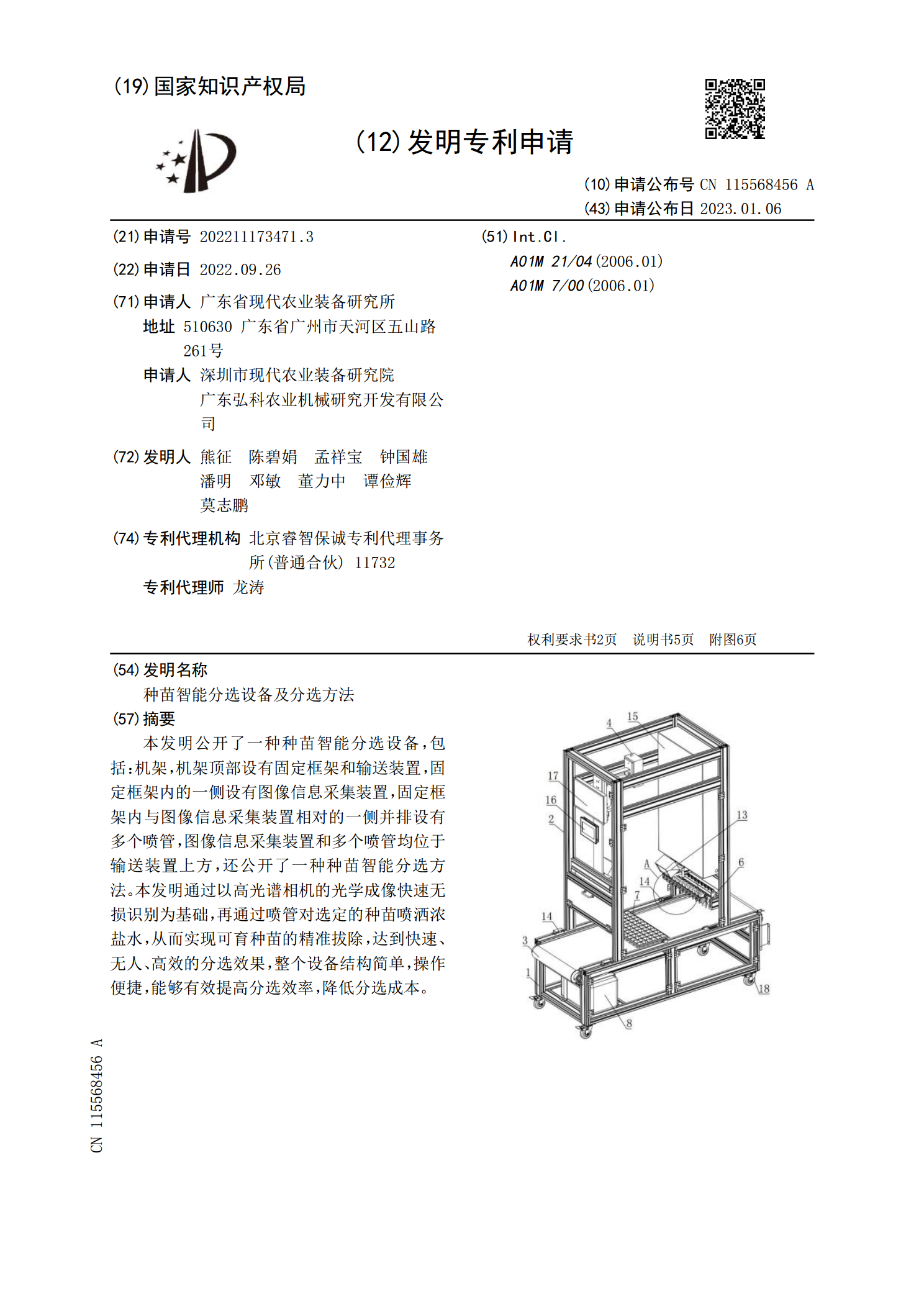
本发明公开了一种种苗智能分选设备,包括:机架,机架顶部设有固定框架和输送装置,固定框架内的一侧设有图像信息采集装置,固定框架内与图像信息采集装置相对的一侧并排设有多个喷管,图像信息采集装置和多个喷管均位于输送装置上方,还公开了一种种苗智能分选方法。本发明通过以高光谱相机的光学成像快速无损识别为基础,再通过喷管对选定的种苗喷洒浓盐水,从而实现可育种苗的精准拔除,达到快速、无人、高效的分选效果,整个设备结构简单,操作便捷,能够有效提高分选效率,降低分选成本。
一种稻谷的分选设备及其分选方法.pdf
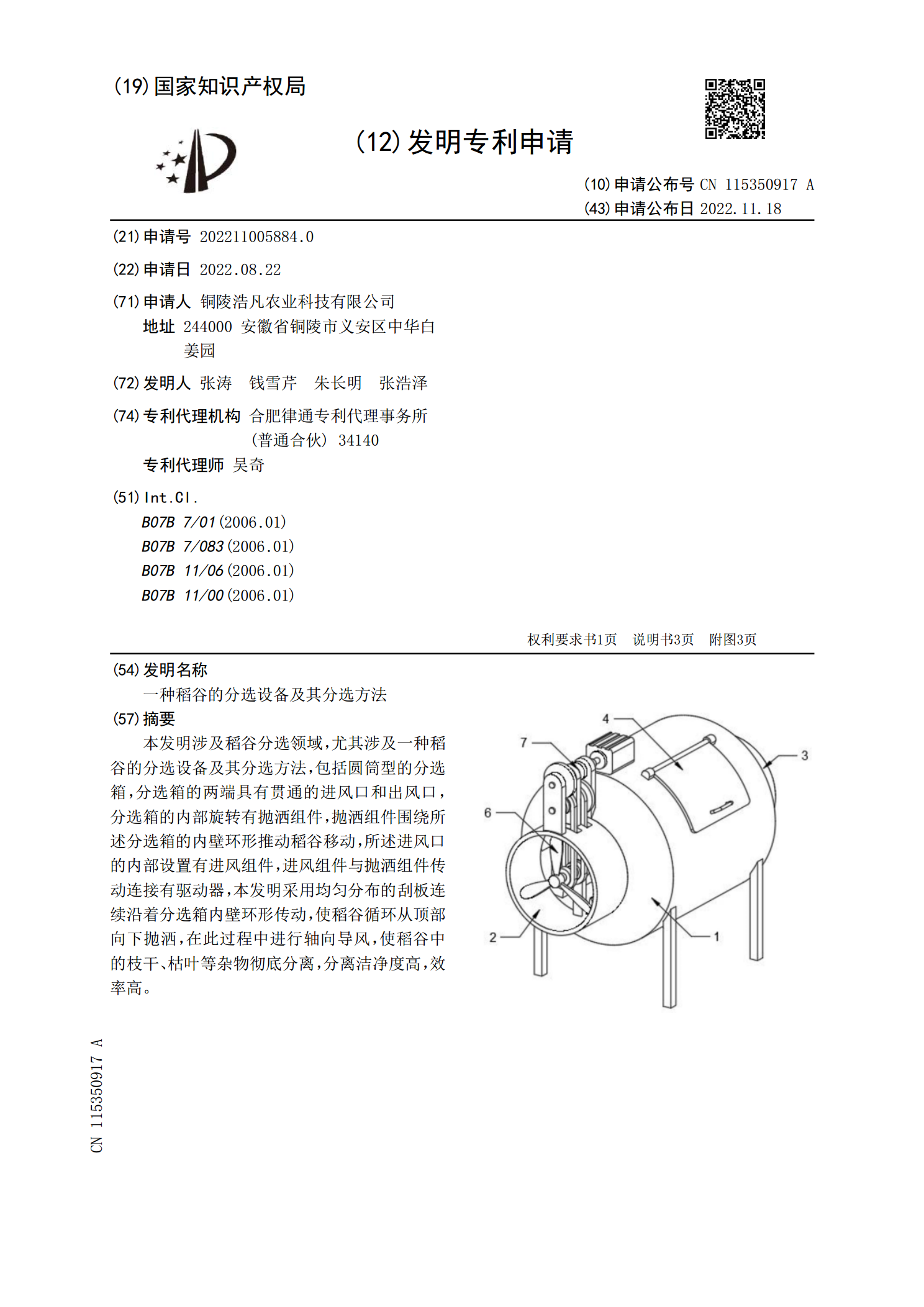
本发明涉及稻谷分选领域,尤其涉及一种稻谷的分选设备及其分选方法,包括圆筒型的分选箱,分选箱的两端具有贯通的进风口和出风口,分选箱的内部旋转有抛洒组件,抛洒组件围绕所述分选箱的内壁环形推动稻谷移动,所述进风口的内部设置有进风组件,进风组件与抛洒组件传动连接有驱动器,本发明采用均匀分布的刮板连续沿着分选箱内壁环形传动,使稻谷循环从顶部向下抛洒,在此过程中进行轴向导风,使稻谷中的枝干、枯叶等杂物彻底分离,分离洁净度高,效率高。

一种电芯分选设备及其分选方法.pdf
本发明所提供的一种电芯分选设备,具有设备前端的上料区、位于设备后端的合格品待料区以及设备一侧的不合格品暂存区,还具有配电柜,上料区具有电芯原料存放装置,电芯原料存放装置为电芯夹具,电芯夹具上安装有重量传感器,所述的重量传感器接入设备的PLC控制电路中,本发明还包括支撑机构、测试机构以及传送机构。本发明还提供了上述电芯分选设备的分选方法,达到了提高电芯各项指标测量自动化程度,减小人工测量误差以及降低人工生产成本的目的。

粗煤泥的分选工艺与分选设备.doc
粗煤泥的分选工艺与分选设备摘要:通过对粗煤泥分选现状的分析,介绍了目前常用的粗煤泥分选设备煤泥重介旋流器、螺旋分选机、水介质旋流器、TBS的结构原理和使用特点,并结合分选设备介绍了煤泥重介粗煤泥分选工艺和粗煤泥组合分选工艺。关键词:粗煤泥分选工艺分选设备旋流器近年来,随着选煤技术的快速发展和采煤机械化程度的提高,使得原煤中的细粒级煤的含量越来越高,另外重介旋流器不断向大型化发展,其分选粒度下限不断上升,在浮选中具有更高选择性的旋流微泡浮选柱的广泛应用使得浮选粒度上限下降,最终导致介于重介旋流器有效分选下限