
图像处理方法及其装置.pdf

Ke****67

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

图像处理方法及其装置.pdf
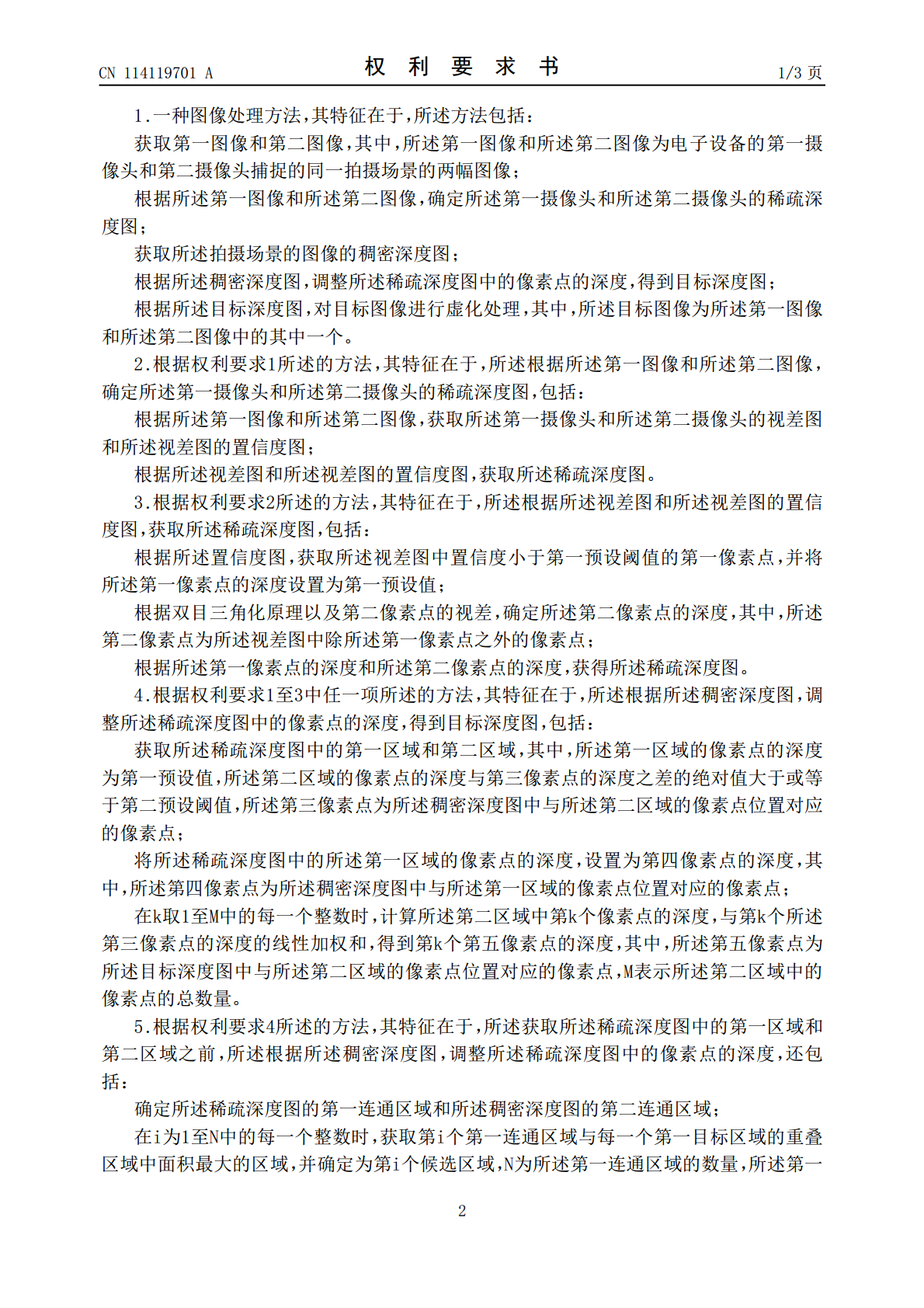
本申请公开了一种图像处理方法及其装置,属于图像处理技术领域。该图像处理方法包括:获取第一图像和第二图像,其中,第一图像和第二图像为电子设备的第一摄像头和第二摄像头捕捉的同一拍摄场景的两幅图像;根据第一图像和第二图像,确定第一摄像头和第二摄像头的稀疏深度图;获取拍摄场景的图像的稠密深度图;根据稠密深度图,调整稀疏深度图中的像素点的深度,得到目标深度图;根据目标深度图,对目标图像进行虚化处理,其中,目标图像为第一图像和第二图像中的其中一个。

图像处理装置及其方法.pdf
本发明公开了一种图像处理装置及其方法,该图像处理装置及其方法基于通过分割图像抽出工序抽出的分割图像对象和通过轮廓图像抽出工序抽出的轮廓对象,可于新对象生成工序生成新图像对象。例如,对于分割图像对象或者轮廓对象的抽出,即使用的是已知手法,也可通过在新对象生成部对分割图像对象和轮廓对象附加对应,取得新图像对象。
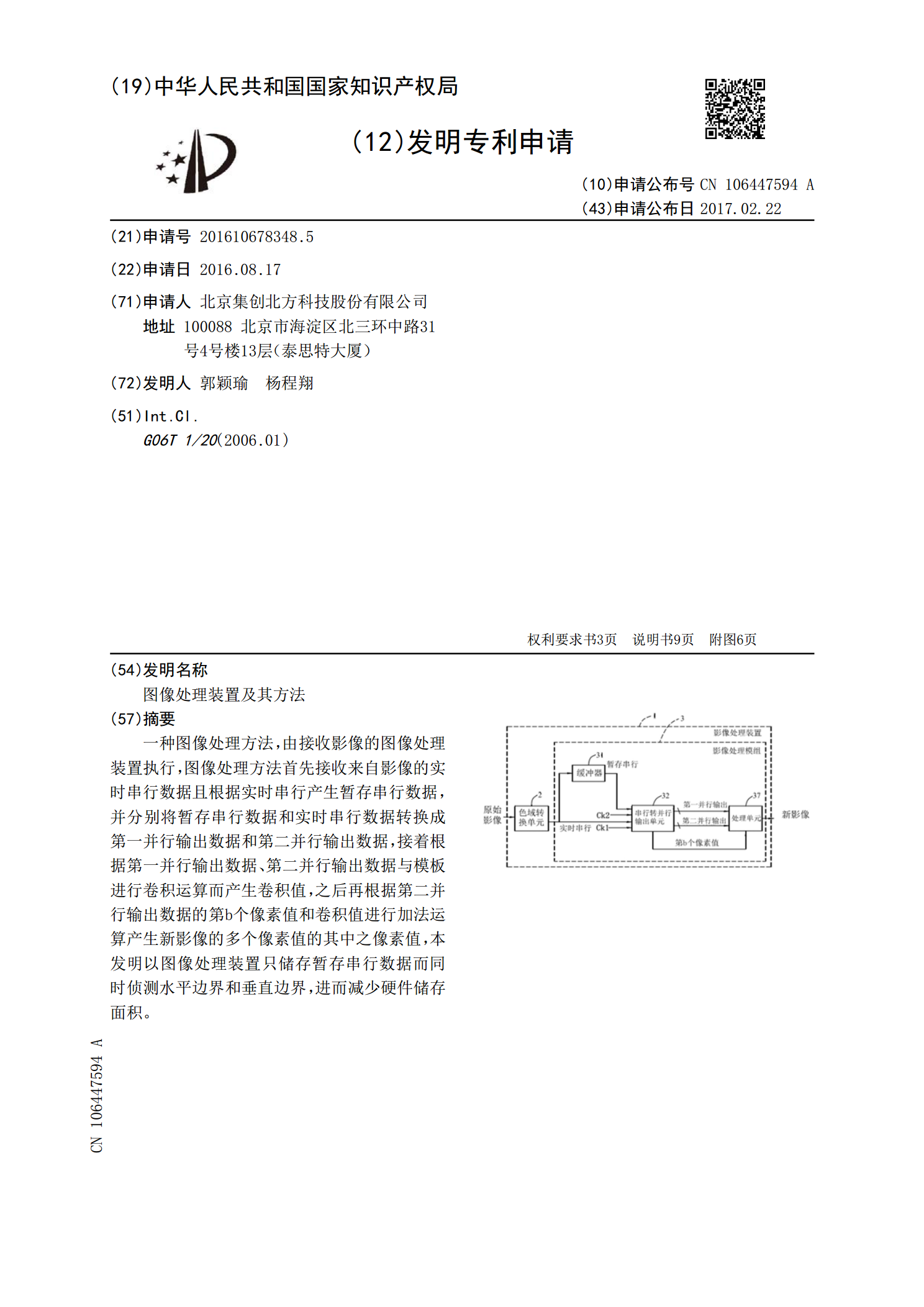
图像处理装置及其方法.pdf
一种图像处理方法,由接收影像的图像处理装置执行,图像处理方法首先接收来自影像的实时串行数据且根据实时串行产生暂存串行数据,并分别将暂存串行数据和实时串行数据转换成第一并行输出数据和第二并行输出数据,接着根据第一并行输出数据、第二并行输出数据与模板进行卷积运算而产生卷积值,之后再根据第二并行输出数据的第b个像素值和卷积值进行加法运算产生新影像的多个像素值的其中之像素值,本发明以图像处理装置只储存暂存串行数据而同时侦测水平边界和垂直边界,进而减少硬件储存面积。

图像处理装置及其控制方法.pdf
本发明提供一种图像处理装置及其控制方法。所述图像处理装置的生成单元生成包括特定被摄体的图像的轮廓信号。检测单元基于所述轮廓信号、针对所述图像的多个分割区域的各个检测代表轮廓方向,其中,当所述分割区域中包括的整个轮廓部分的方向以至少特定程度向特定方向偏斜时,所述检测单元将该特定方向检测为所述代表轮廓方向。确定单元基于检测到的所述代表轮廓方向的基于方向的频率分布、检测到的所述代表轮廓方向的数量等的至少一者,来确定所述被摄体的类型。校正单元被构造为根据对应于所述被摄体的类型的校正方法来校正所述图像数据。
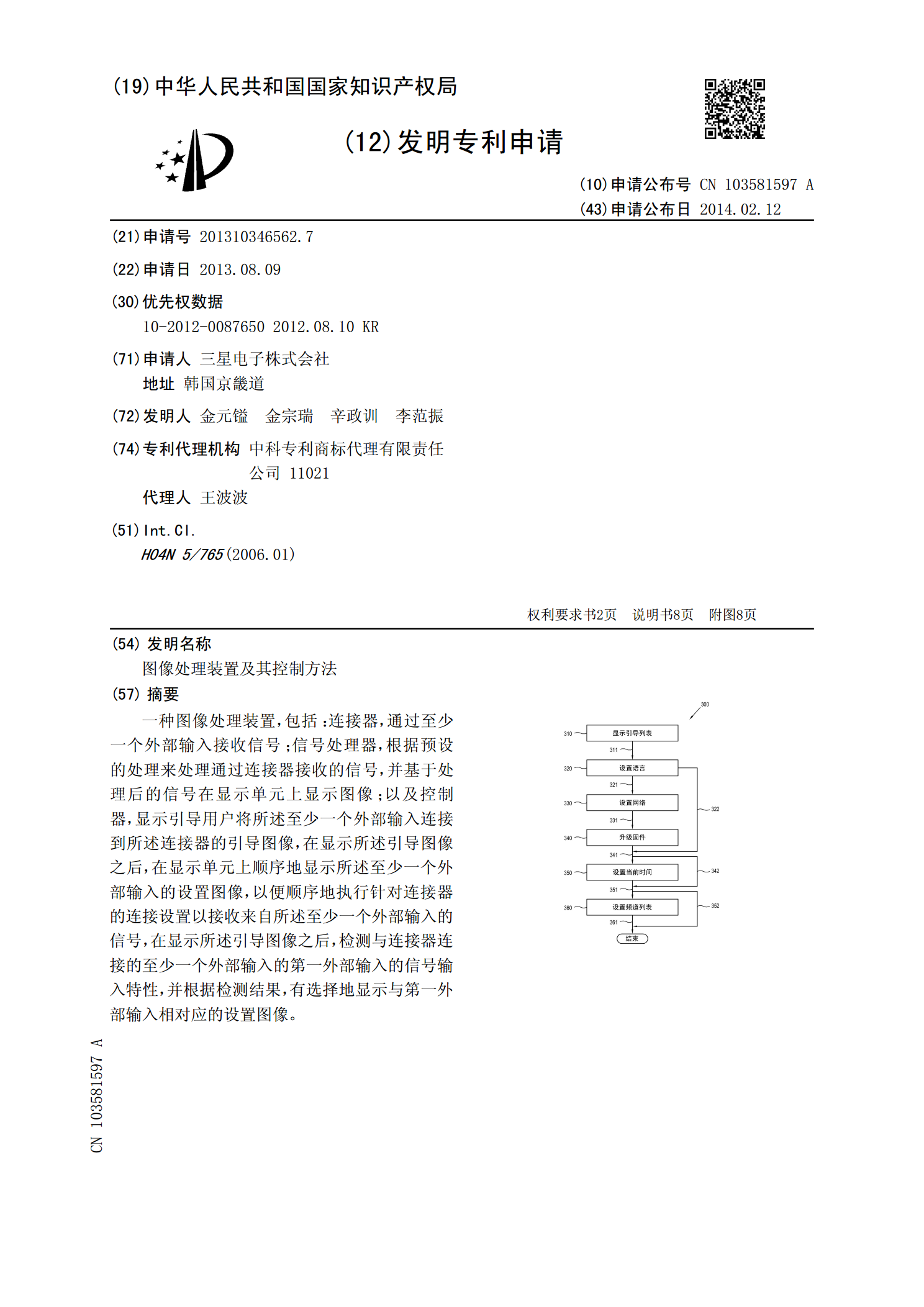
图像处理装置及其控制方法.pdf
一种图像处理装置,包括:连接器,通过至少一个外部输入接收信号;信号处理器,根据预设的处理来处理通过连接器接收的信号,并基于处理后的信号在显示单元上显示图像;以及控制器,显示引导用户将所述至少一个外部输入连接到所述连接器的引导图像,在显示所述引导图像之后,在显示单元上顺序地显示所述至少一个外部输入的设置图像,以便顺序地执行针对连接器的连接设置以接收来自所述至少一个外部输入的信号,在显示所述引导图像之后,检测与连接器连接的至少一个外部输入的第一外部输入的信号输入特性,并根据检测结果,有选择地显示与第一外部输入