
一种基于遮挡补偿的立体空间信息融合的多目标跟踪方法.pdf

fa****楠吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于遮挡补偿的立体空间信息融合的多目标跟踪方法.pdf
本发明公开了一种基于遮挡补偿的立体空间信息融合的多目标跟踪方法,所述方法包括:接收激光雷达采集的点云和相机采集的RGB图像;将点云数据输入三维检测器得到三维检测结果;将RGB图像和三维检测结果不断输入预先建立和训练好的端到端多目标跟踪网络,实时更新跟踪器,循环完成目标跟踪;所述端到端多目标跟踪网络,用于基于RGB图像和三维检测结果,并结合上一帧轨迹的运动特征和外观特征,分别建立运动关联矩阵和外观关联矩阵进行轨迹和检测的关联,并结合遮挡情况更新跟踪器实现目标跟踪。本发明的方法有效地融合了多源信息,并考虑到图

基于深度学习与信息融合的多目标跟踪.pptx
,目录PartOnePartTwo深度学习在多目标跟踪中的重要性深度学习算法在多目标跟踪中的实现方式深度学习在多目标跟踪中的优势与挑战PartThree信息融合的基本概念信息融合在多目标跟踪中的实现方式信息融合在多目标跟踪中的优势与挑战PartFour算法概述算法流程与实现细节算法性能评估与比较PartFive安全监控与智能安防无人驾驶与智能交通机器人技术与智能服务视频分析与人机交互PartSix基于深度学习与信息融合的多目标跟踪的未来研究方向多目标跟踪技术的挑战与机遇多目标跟踪技术的发展趋势与展望THA

基于深度学习与信息融合的多目标跟踪.docx
基于深度学习与信息融合的多目标跟踪基于深度学习与信息融合的多目标跟踪摘要:多目标跟踪是计算机视觉领域的重要任务之一。针对目标跟踪过程中的诸多挑战,本文提出了一种基于深度学习与信息融合的多目标跟踪方法。首先,利用深度学习网络对目标进行特征提取和表示学习。其次,通过信息融合技术综合利用多种传感器和来源的信息来提高目标跟踪的准确性和鲁棒性。实验结果表明,本文提出的方法在多目标跟踪任务中取得了较好的性能。关键词:深度学习,信息融合,多目标跟踪1.引言多目标跟踪是计算机视觉领域中的基础任务之一,广泛应用于视频监控、
一种基于雷视融合的多目标跟踪方法.pdf
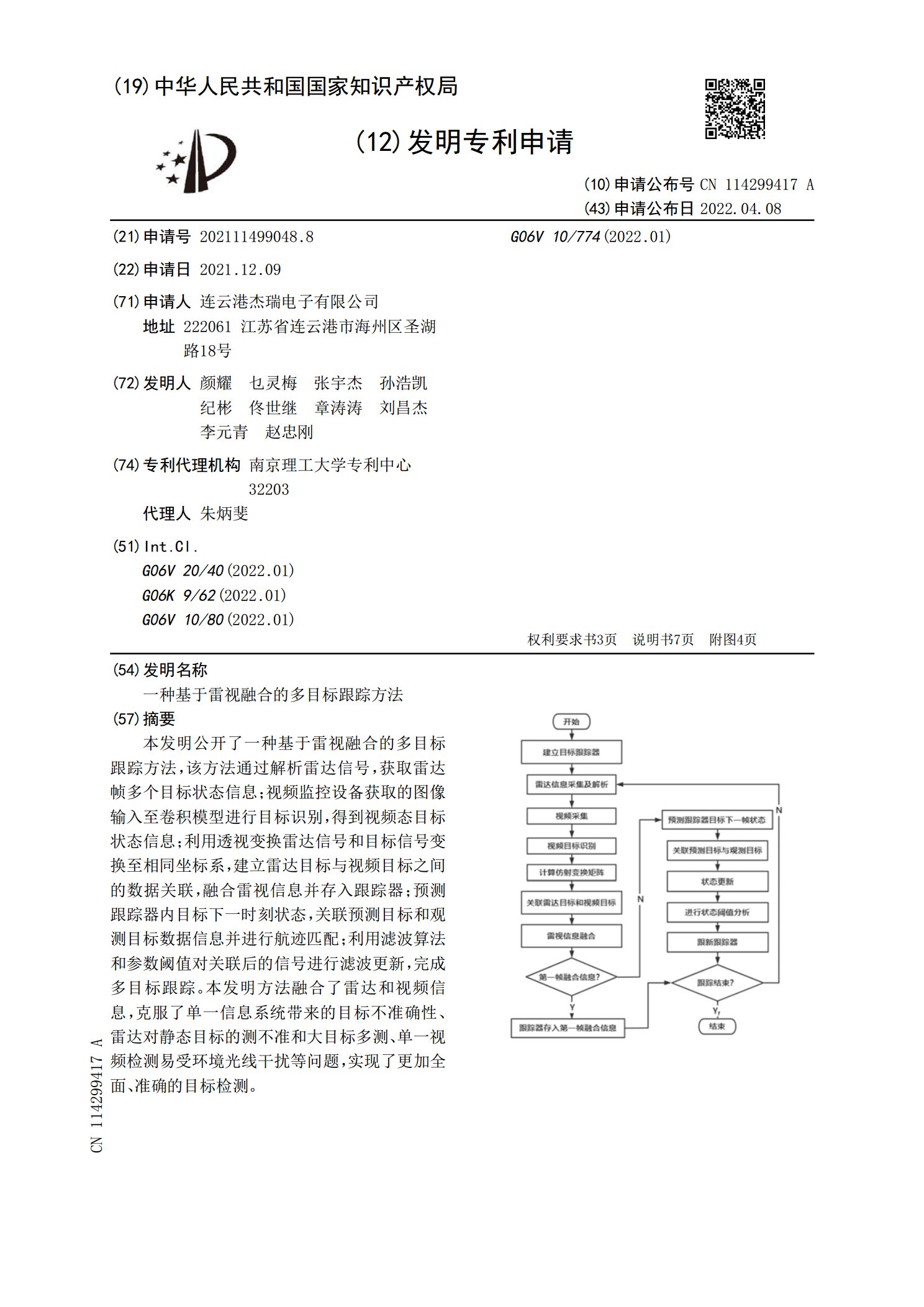
本发明公开了一种基于雷视融合的多目标跟踪方法,该方法通过解析雷达信号,获取雷达帧多个目标状态信息;视频监控设备获取的图像输入至卷积模型进行目标识别,得到视频态目标状态信息;利用透视变换雷达信号和目标信号变换至相同坐标系,建立雷达目标与视频目标之间的数据关联,融合雷视信息并存入跟踪器;预测跟踪器内目标下一时刻状态,关联预测目标和观测目标数据信息并进行航迹匹配;利用滤波算法和参数阈值对关联后的信号进行滤波更新,完成多目标跟踪。本发明方法融合了雷达和视频信息,克服了单一信息系统带来的目标不准确性、雷达对静态目标
一种基于从粗到精遮挡处理的多目标跟踪方法.pdf
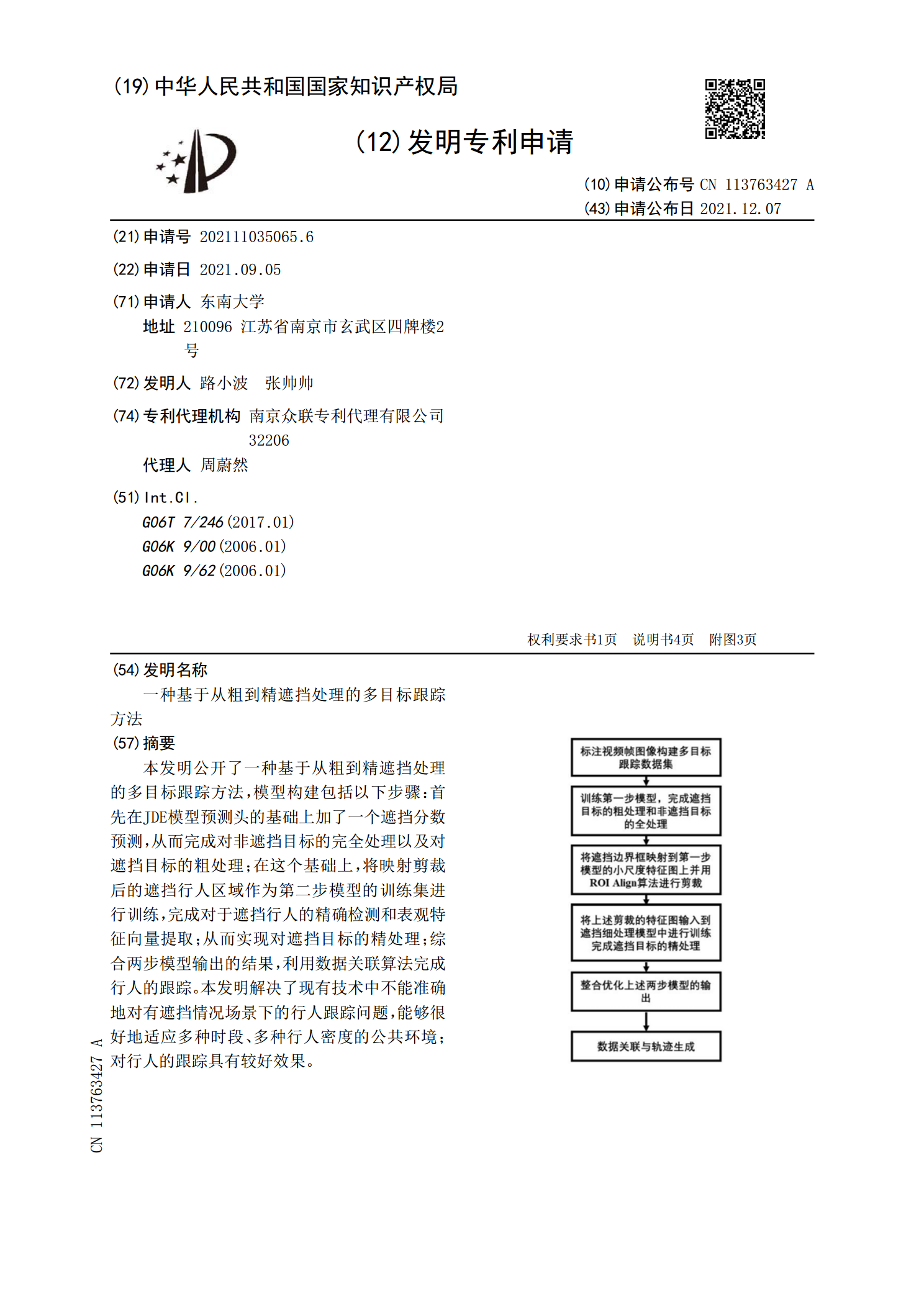
本发明公开了一种基于从粗到精遮挡处理的多目标跟踪方法,模型构建包括以下步骤:首先在JDE模型预测头的基础上加了一个遮挡分数预测,从而完成对非遮挡目标的完全处理以及对遮挡目标的粗处理;在这个基础上,将映射剪裁后的遮挡行人区域作为第二步模型的训练集进行训练,完成对于遮挡行人的精确检测和表观特征向量提取;从而实现对遮挡目标的精处理;综合两步模型输出的结果,利用数据关联算法完成行人的跟踪。本发明解决了现有技术中不能准确地对有遮挡情况场景下的行人跟踪问题,能够很好地适应多种时段、多种行人密度的公共环境;对行人的跟踪