
一种基于雷视融合的多目标跟踪方法.pdf

文库****坚白

1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于雷视融合的多目标跟踪方法.pdf
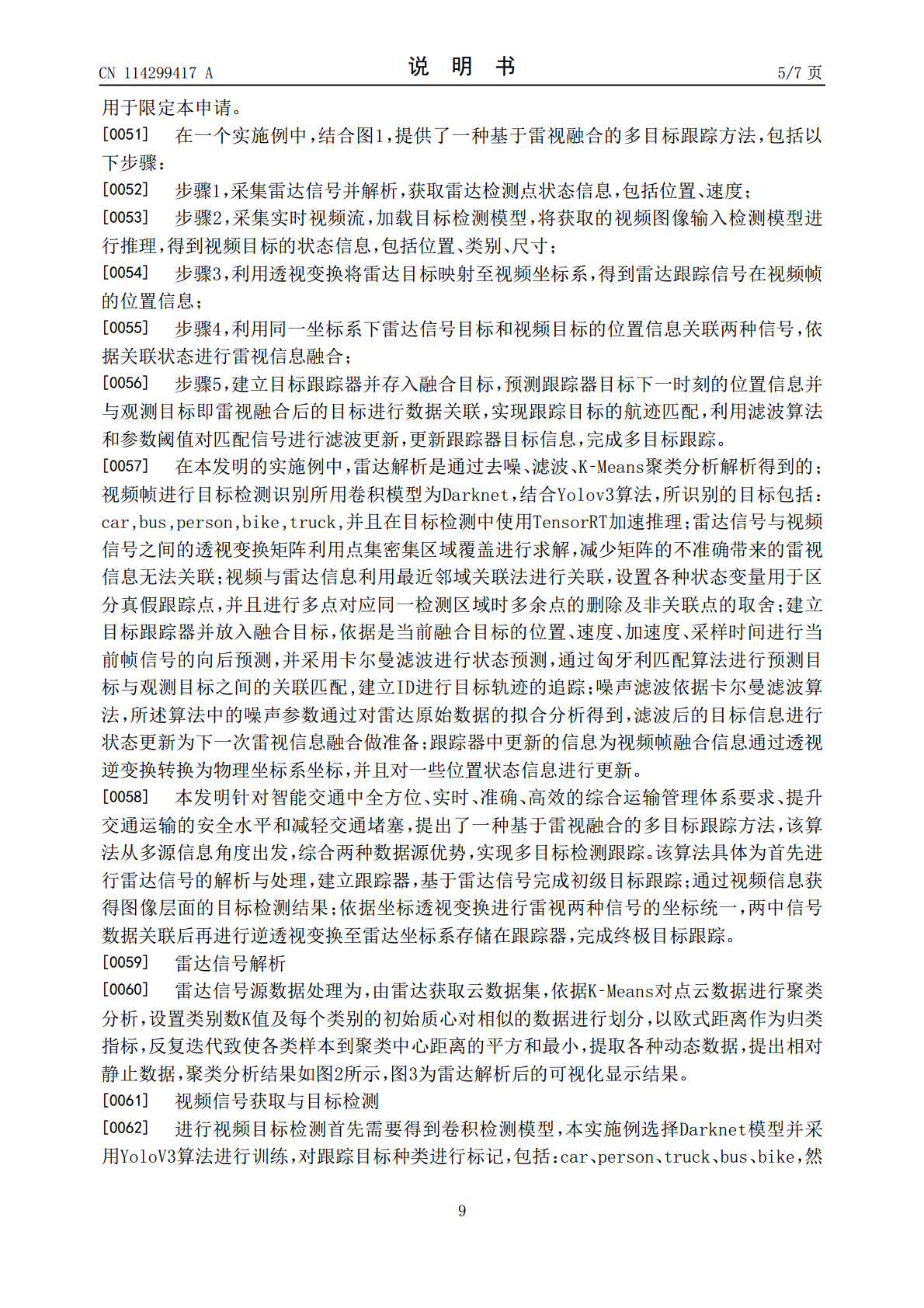
本发明公开了一种基于雷视融合的多目标跟踪方法,该方法通过解析雷达信号,获取雷达帧多个目标状态信息;视频监控设备获取的图像输入至卷积模型进行目标识别,得到视频态目标状态信息;利用透视变换雷达信号和目标信号变换至相同坐标系,建立雷达目标与视频目标之间的数据关联,融合雷视信息并存入跟踪器;预测跟踪器内目标下一时刻状态,关联预测目标和观测目标数据信息并进行航迹匹配;利用滤波算法和参数阈值对关联后的信号进行滤波更新,完成多目标跟踪。本发明方法融合了雷达和视频信息,克服了单一信息系统带来的目标不准确性、雷达对静态目标

一种基于雷视融合的多目标车辆检测及重识别方法.pdf
一种基于雷视融合的多目标车辆检测及重识别方法,该方法主要采用的路侧感知设备包括路侧视频摄像机与毫米波雷达。该方法中,使用视频摄像机与毫米波雷达两类传感器对道路中行驶车辆进行多目标车辆检测,采用多传感器数据融合的方法对视频摄像机图像数据与毫米波雷达检测目标数据进行数据融合,提升目标检测数据精度。该方法考虑了单视频摄像机对多目标车辆进行连续追踪与跨视频摄像机对多目标车辆进行连续追踪两类场景,在基于视频图像提取的多目标车辆图像特征的基础上,结合路侧毫米波雷达检测的数据,获取多目标车辆的地理空间特征,为车辆属性增
一种基于雷视融合探测的车辆识别方法.pdf
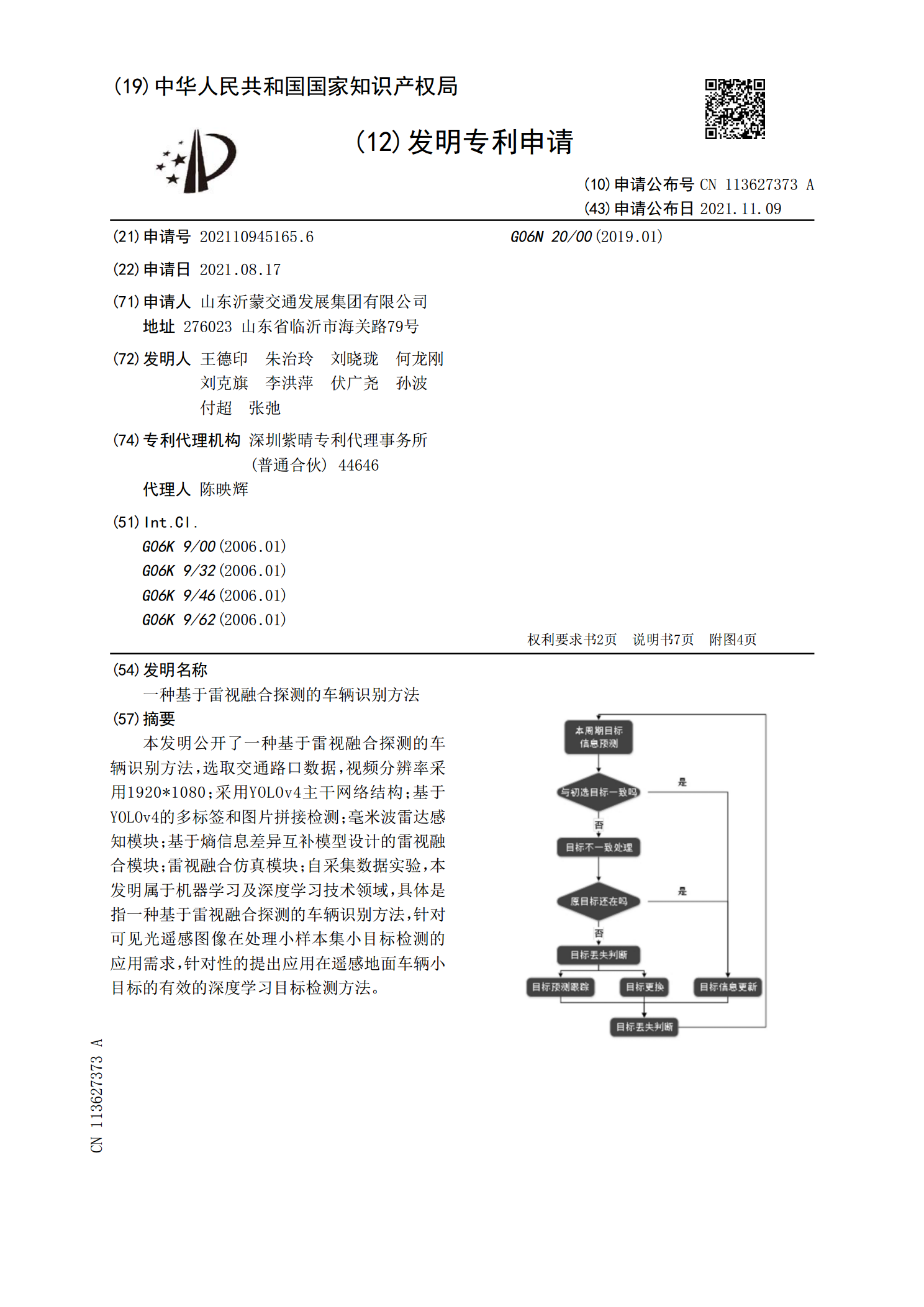
本发明公开了一种基于雷视融合探测的车辆识别方法,选取交通路口数据,视频分辨率采用1920*1080;采用YOLOv4主干网络结构;基于YOLOv4的多标签和图片拼接检测;毫米波雷达感知模块;基于熵信息差异互补模型设计的雷视融合模块;雷视融合仿真模块;自采集数据实验,本发明属于机器学习及深度学习技术领域,具体是指一种基于雷视融合探测的车辆识别方法,针对可见光遥感图像在处理小样本集小目标检测的应用需求,针对性的提出应用在遥感地面车辆小目标的有效的深度学习目标检测方法。

一种基于雷视一体的交通目标跟踪方法.pdf
本发明公开了一种基于雷视一体的交通目标跟踪方法,包括以下步骤:确定单传感器目标跟踪问题:根据交通应用场景,进行雷达和视频的数据采集工作并进行分析,得出目标跟踪结果作为后续决策级融合算法的输入和对比数据‑时空匹配:采用单目标测试场景数据进行坐标系匹配的调试,得到两个传感器之间准确的转换参数,匹配完成后的数据能够在同一维度进行显示‑构建基于多模态融合的多目标跟踪算法:目标关联‑决策融合‑融合中心保存信息。本发明采用上述基于雷视一体的交通目标跟踪方法,解决了单传感器采集数据进行目标跟踪出现的问题,从而提升了目标

一种基于隧道雷视数据融合的事件检测方法、装置及系统.pdf
本发明公开了隧道检测领域的一种基于隧道雷视数据融合的事件检测方法、装置及系统,对雷达数据进行分类筛选,得到雷达数据目标检测点;对视频数据进行目标检测,得到视频数据检测目标;基于雷达数据检测目标和视频数据检测目标,通过检测框交叉比的融合算法进行决策级融合,得到目标融合结果;所述目标融合结果包括目标的速度、位置信息、数量以及目标间的间距;所述目标包括车辆目标和非车辆目标;根据目标融合结果,进行交通事件检测判定,得到交通事件检测结果;本发明分析融合后交通特征信息,判断是否发生交通事件,并输出交通事件的类型进行事