
一种非最小相位运动系统逆模型前馈频域计算方法.pdf

fa****楠吖

1/8
2/8
3/8

4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种非最小相位运动系统逆模型前馈频域计算方法.pdf
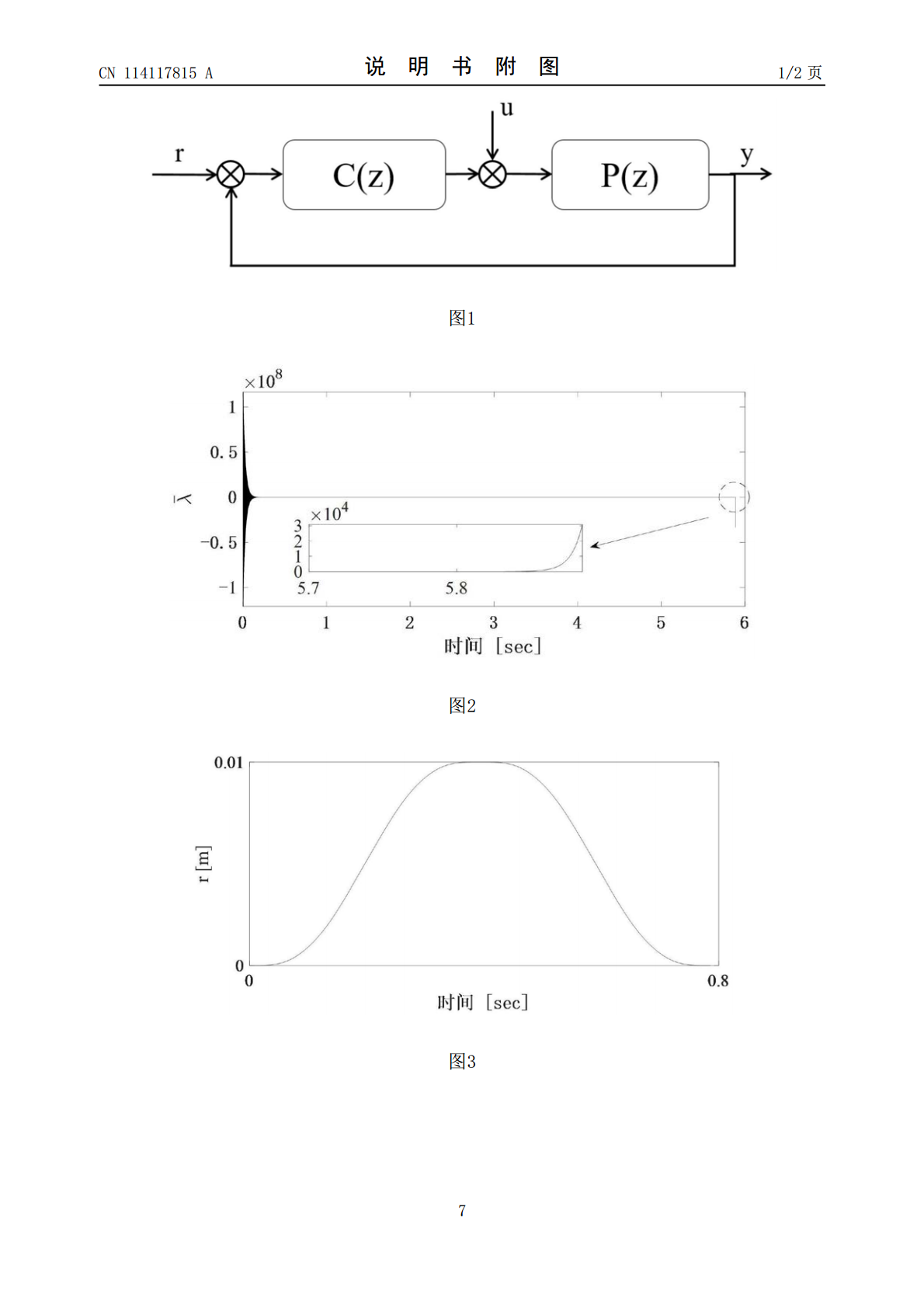
一种非最小相位运动系统逆模型前馈频域计算方法,属于超精密运动控制领域。前馈控制输入计算的目标是,得到一个理想前馈控制输入序列u

第12讲bode最小相位系统和非最小相位系统.pptx
第12讲程向红第5章线性系统的频域分析法Frequency-responseanalysis5.1.2频率特性的表示法极坐标图(Polarplot)=幅相频率特性曲线=幅相曲线5.2典型环节频率特性曲线的绘制5.2.2积分与微分因子5.2.3一阶因子5.2.4二阶因子图5-15开环系统的伯德图45.2.5最小相位系统与非最小相位系统对于最小相位系统其传递函数由单一的幅值曲线唯一确定。对于非最小相位系统则不是这种情况。非最小相位系统在具有相同幅值特性的系统中最小相位传递函数(系统)的

基于频域无源性的并网逆变器前馈相位补偿策略.docx
基于频域无源性的并网逆变器前馈相位补偿策略基于频域无源性的并网逆变器前馈相位补偿策略摘要:随着可再生能源的迅速发展,以及对电能质量要求的不断提升,并网逆变器在分布式电源系统中的应用越来越广泛。然而,由于受到电网扰动和非线性负载的影响,逆变器输出波形的失真和功率因数的下降导致了电能质量的恶化。为了改善这一问题,首先对逆变器的频域无源性进行分析,然后提出了一种基于频域无源性的逆变器前馈相位补偿策略,该策略能够有效抑制逆变器输出谐波,提高逆变器的功率因数,并实现并网逆变器的平滑控制。关键词:频域无源性;并网逆变

一种非最小相位系统控制方法.docx
一种非最小相位系统控制方法非最小相位系统(NonminimumPhaseSystem)是指系统无法通过反馈控制实现内部稳定的动态系统。对于非最小相位系统的控制通常会面临一些困难,例如传统的比例积分(PI)或比例积分微分(PID)控制器可能无法达到所期望的性能。因此,针对非最小相位系统的控制设计成为了一个重要的研究课题。本文将介绍一种用于非最小相位系统的控制方法——基于内部模型控制(InternalModelControl,简称IMC)的方法。首先将对非最小相位系统进行简单的介绍,然后详细讨论IMC方法的原

非最小相位系统的复杂控制算法研究.docx
非最小相位系统的复杂控制算法研究非最小相位系统的复杂控制算法研究摘要:非最小相位系统是指具有多个零点或者零点与极点分布不均匀的系统。这种系统在控制过程中会带来一定的困难,因为其频率响应的相位特性比最小相位系统复杂。因此,针对非最小相位系统的复杂控制算法研究成为了一个重要的研究方向。本文将从非最小相位系统的定义、特点以及现有的复杂控制算法进行分析和综述,并对未来的研究方向进行展望。1.引言非最小相位系统是指其频率响应的相位特性比最小相位系统复杂的系统。它们具有多个零点或者零点与极点分布不均匀,这导致在控制过