
一种多智能体搜索情感目标路径规划方法及装置.pdf

邻家****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多智能体搜索情感目标路径规划方法及装置.pdf
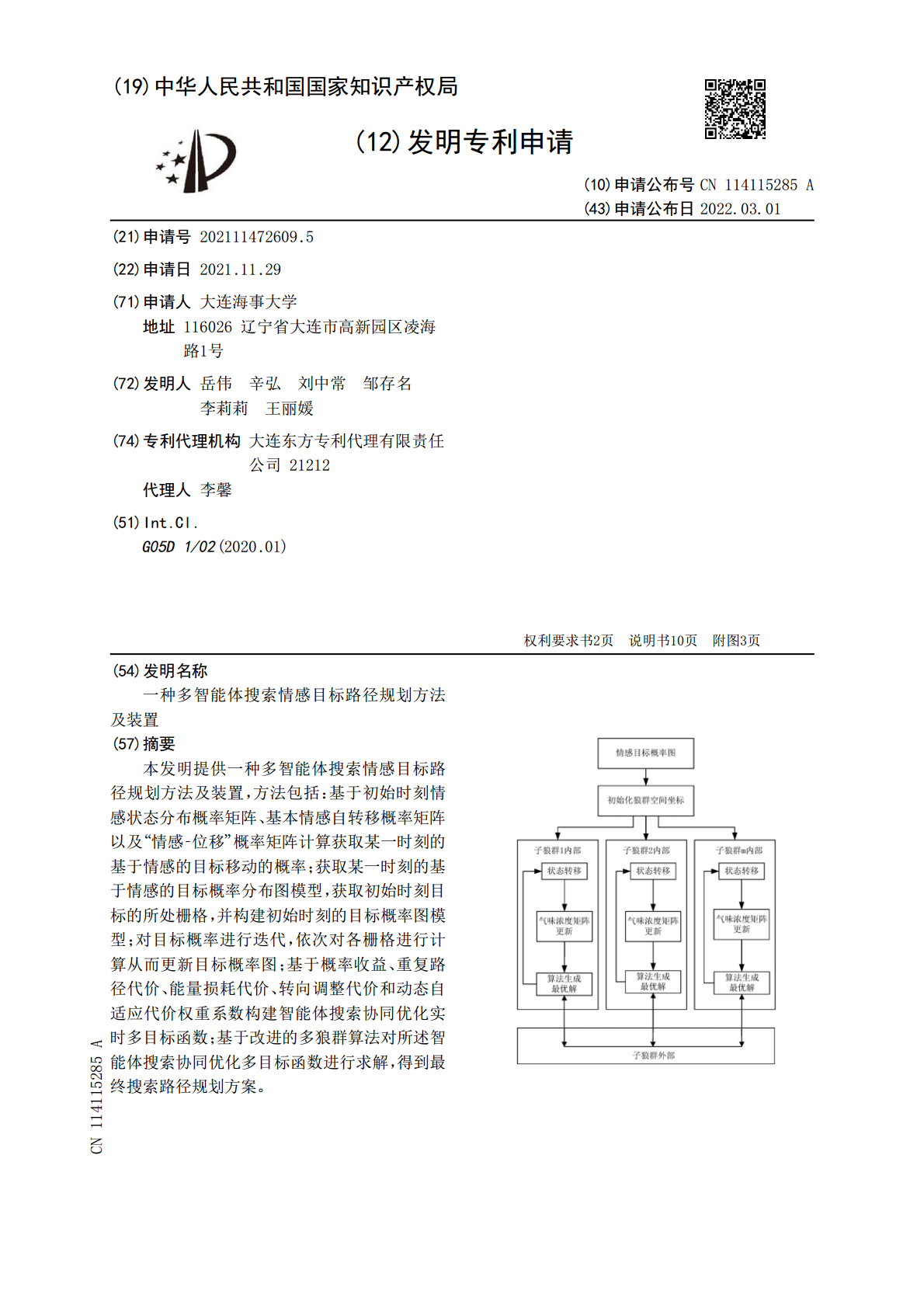
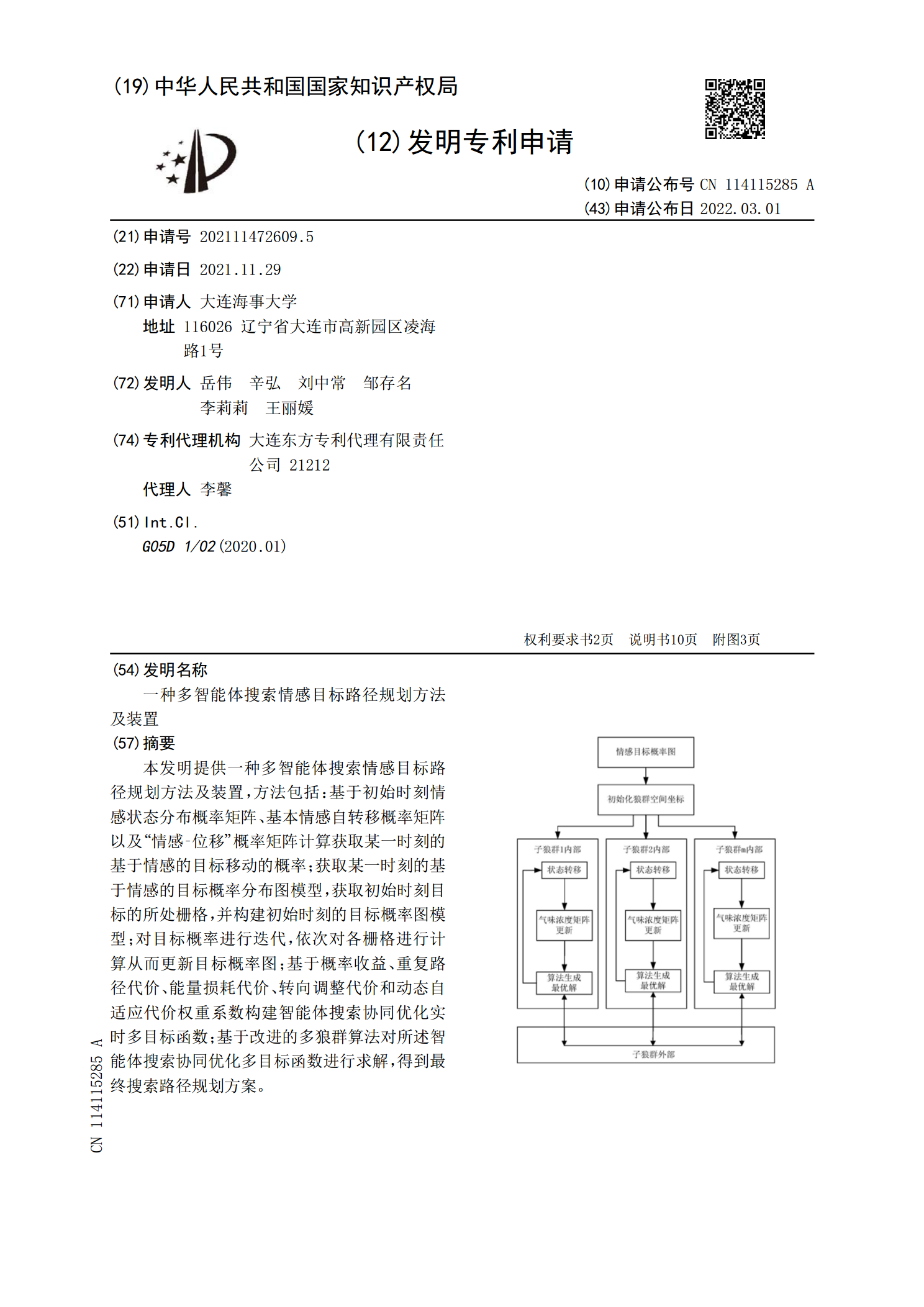
本发明提供一种多智能体搜索情感目标路径规划方法及装置,方法包括:基于初始时刻情感状态分布概率矩阵、基本情感自转移概率矩阵以及“情感‑位移”概率矩阵计算获取某一时刻的基于情感的目标移动的概率;获取某一时刻的基于情感的目标概率分布图模型,获取初始时刻目标的所处栅格,并构建初始时刻的目标概率图模型;对目标概率进行迭代,依次对各栅格进行计算从而更新目标概率图;基于概率收益、重复路径代价、能量损耗代价、转向调整代价和动态自适应代价权重系数构建智能体搜索协同优化实时多目标函数;基于改进的多狼群算法对所述智能体搜索协同
一种基于搜索的多智能体路径规划方法及系统.pdf
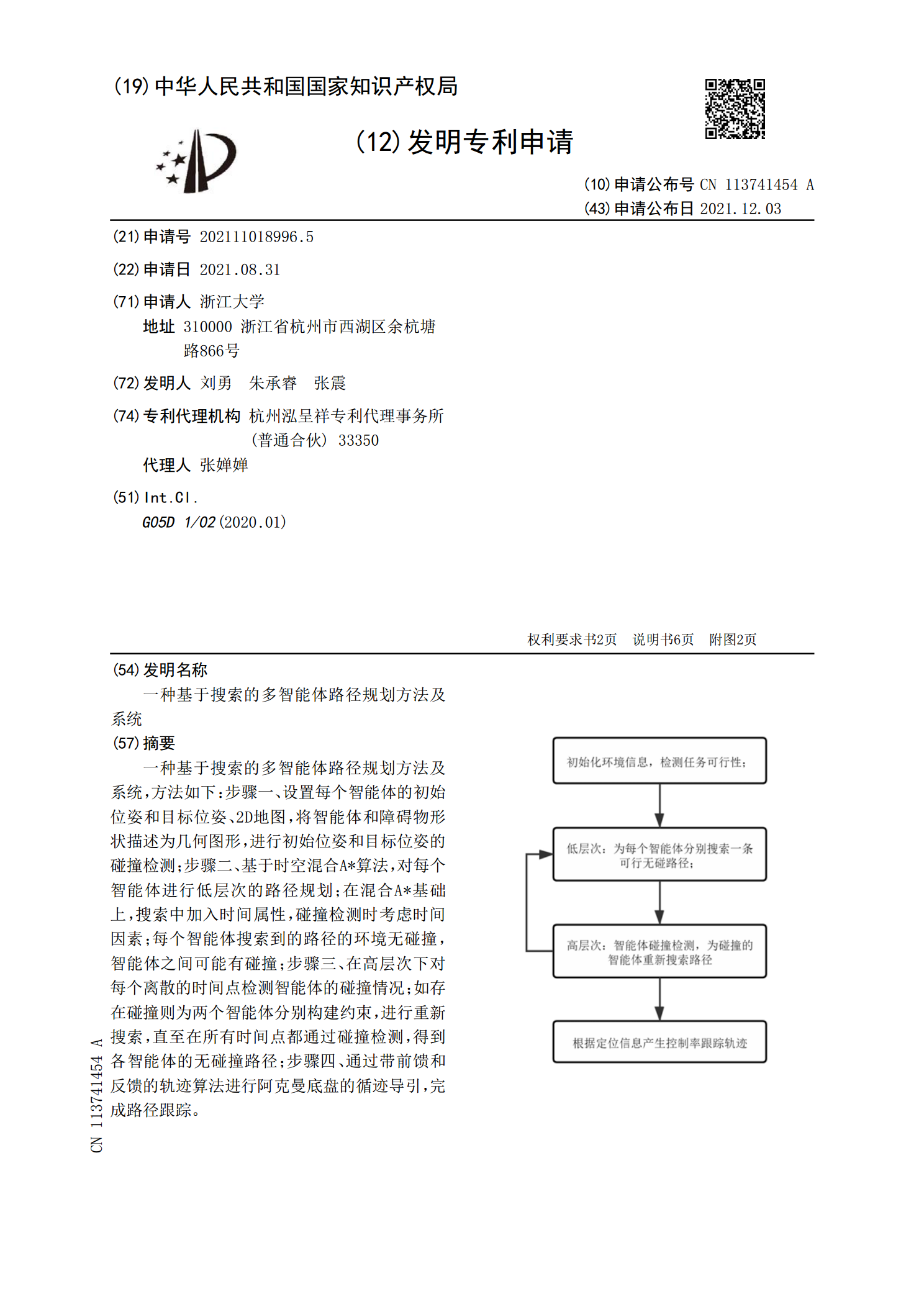
一种基于搜索的多智能体路径规划方法及系统,方法如下:步骤一、设置每个智能体的初始位姿和目标位姿、2D地图,将智能体和障碍物形状描述为几何图形,进行初始位姿和目标位姿的碰撞检测;步骤二、基于时空混合A*算法,对每个智能体进行低层次的路径规划;在混合A*基础上,搜索中加入时间属性,碰撞检测时考虑时间因素;每个智能体搜索到的路径的环境无碰撞,智能体之间可能有碰撞;步骤三、在高层次下对每个离散的时间点检测智能体的碰撞情况;如存在碰撞则为两个智能体分别构建约束,进行重新搜索,直至在所有时间点都通过碰撞检测,得到各智
一种多智能体目标协同搜索方法及系统.pdf
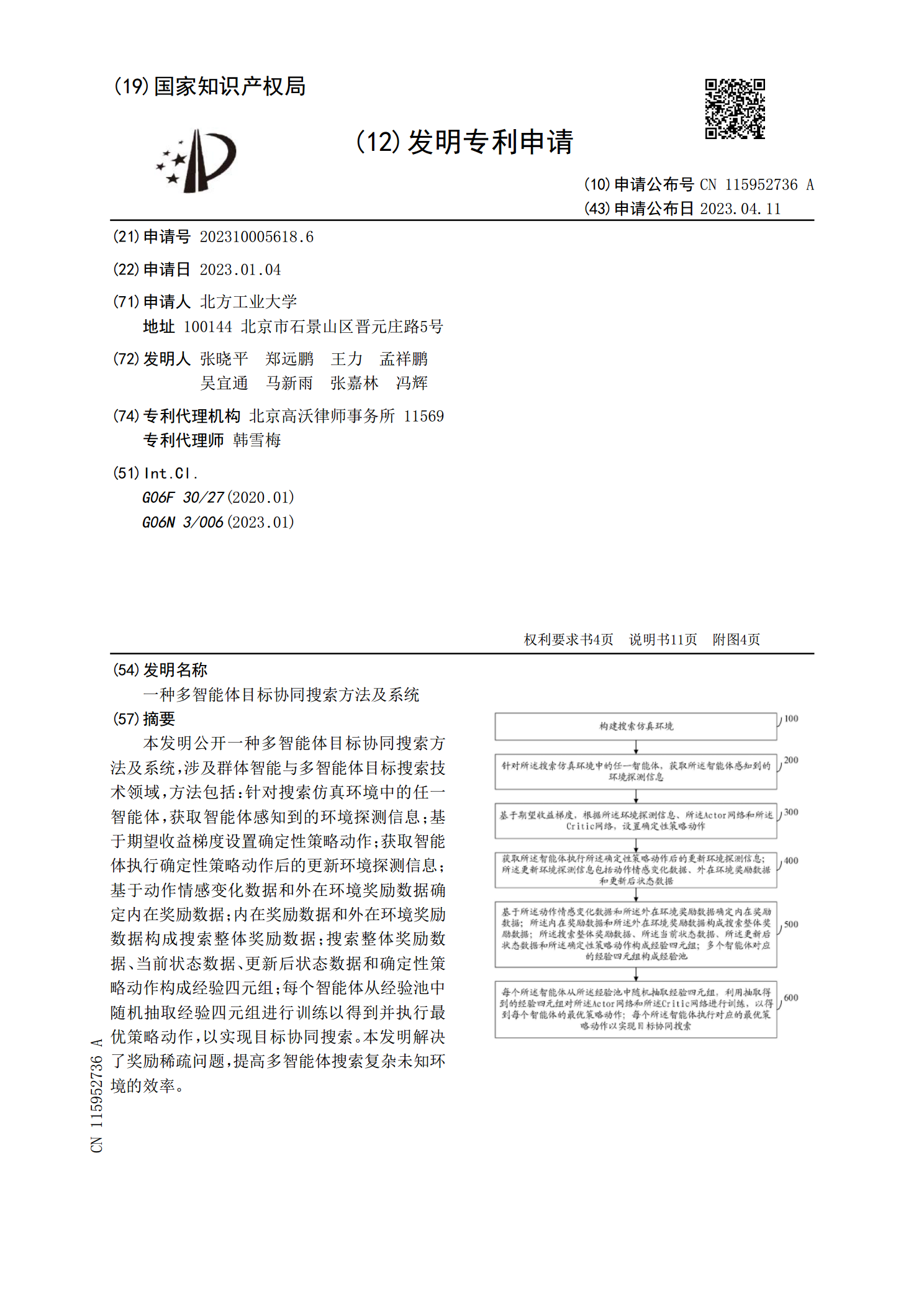
本发明公开一种多智能体目标协同搜索方法及系统,涉及群体智能与多智能体目标搜索技术领域,方法包括:针对搜索仿真环境中的任一智能体,获取智能体感知到的环境探测信息;基于期望收益梯度设置确定性策略动作;获取智能体执行确定性策略动作后的更新环境探测信息;基于动作情感变化数据和外在环境奖励数据确定内在奖励数据;内在奖励数据和外在环境奖励数据构成搜索整体奖励数据;搜索整体奖励数据、当前状态数据、更新后状态数据和确定性策略动作构成经验四元组;每个智能体从经验池中随机抽取经验四元组进行训练以得到并执行最优策略动作,以实现
动态环境下的多智能体路径规划方法、装置、设备及介质.pdf
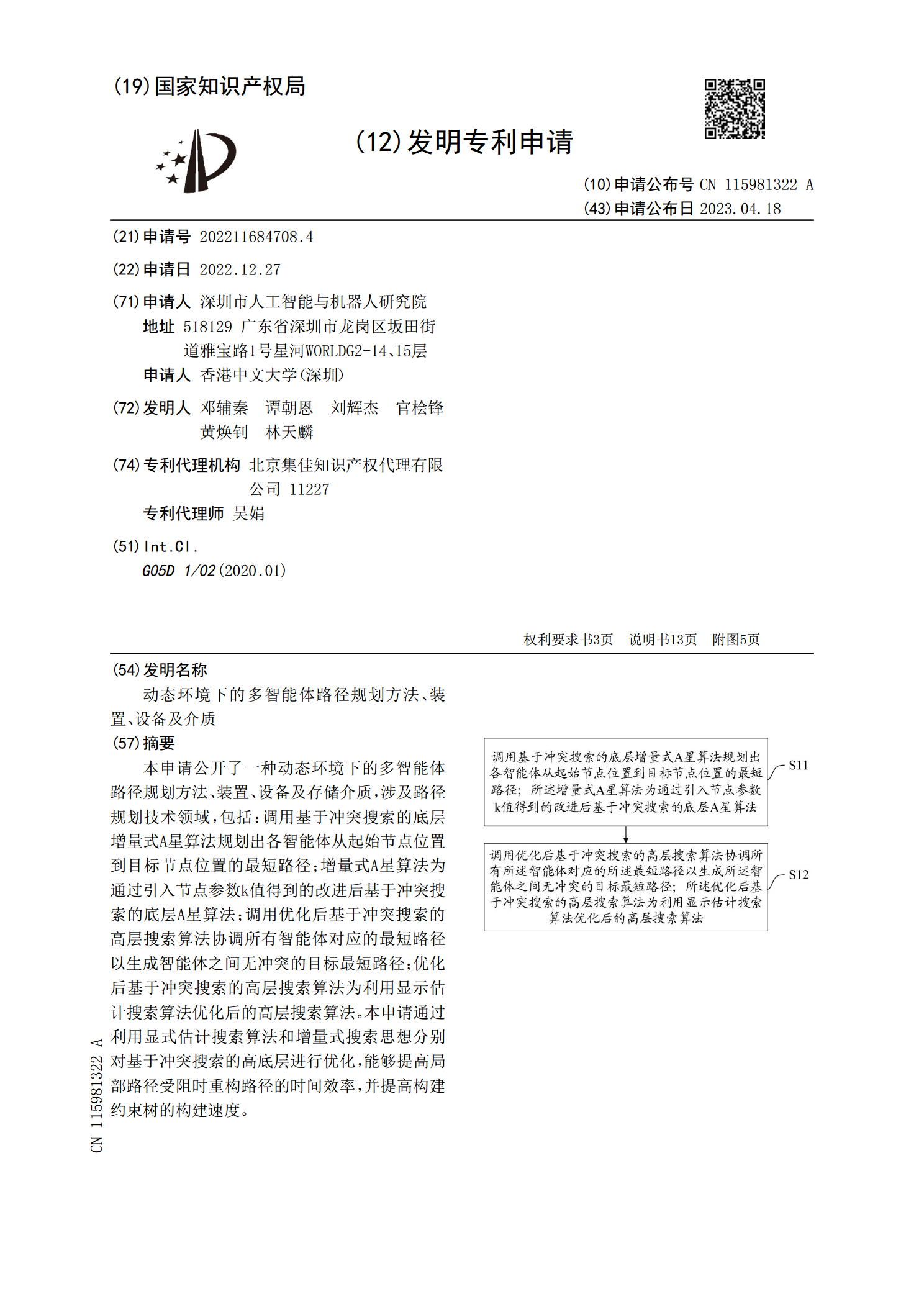
本申请公开了一种动态环境下的多智能体路径规划方法、装置、设备及存储介质,涉及路径规划技术领域,包括:调用基于冲突搜索的底层增量式A星算法规划出各智能体从起始节点位置到目标节点位置的最短路径;增量式A星算法为通过引入节点参数k值得到的改进后基于冲突搜索的底层A星算法;调用优化后基于冲突搜索的高层搜索算法协调所有智能体对应的最短路径以生成智能体之间无冲突的目标最短路径;优化后基于冲突搜索的高层搜索算法为利用显示估计搜索算法优化后的高层搜索算法。本申请通过利用显式估计搜索算法和增量式搜索思想分别对基于冲突搜索的
一种基于异步遗传算法的多智能体路径规划方法.pdf
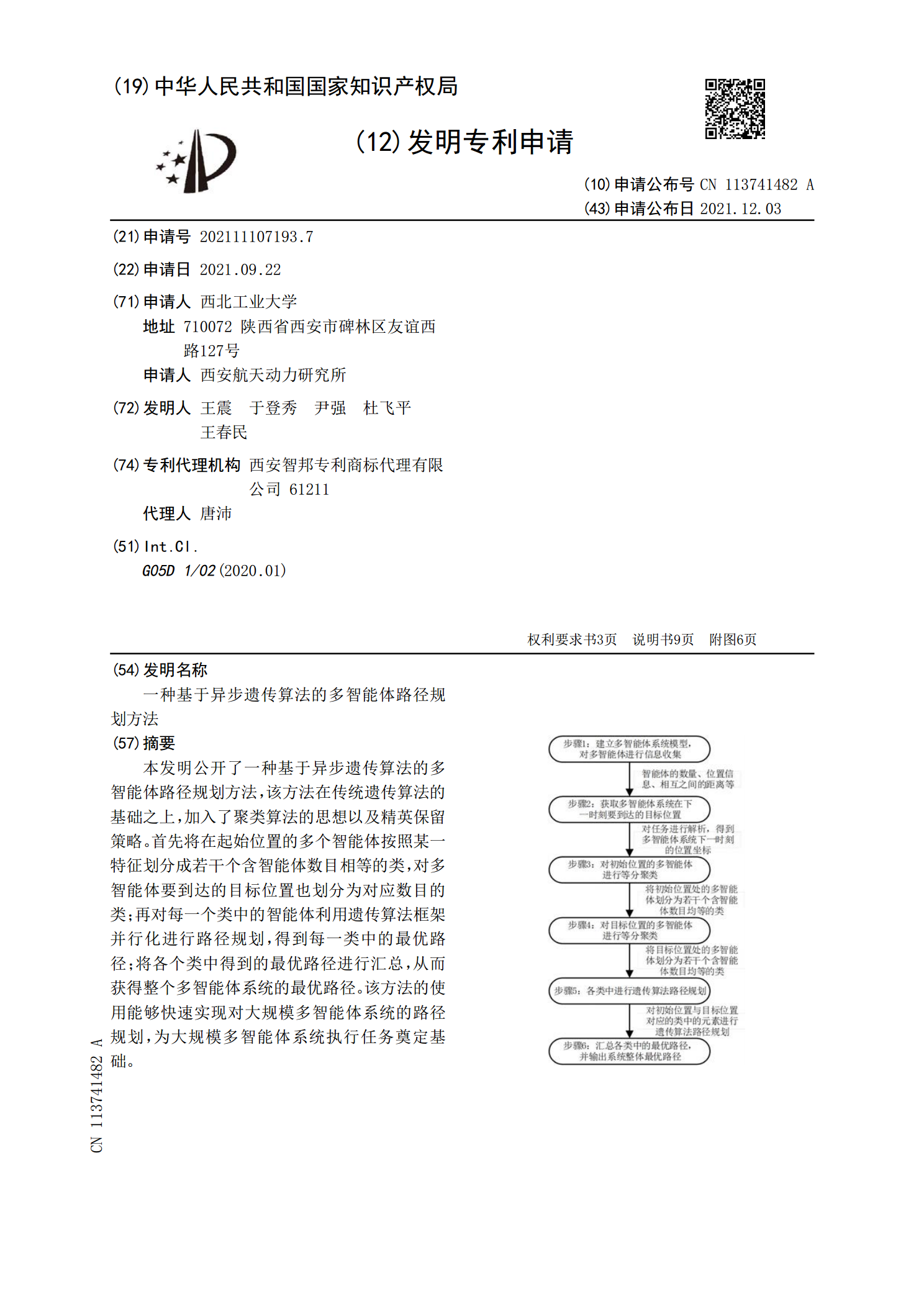
本发明公开了一种基于异步遗传算法的多智能体路径规划方法,该方法在传统遗传算法的基础之上,加入了聚类算法的思想以及精英保留策略。首先将在起始位置的多个智能体按照某一特征划分成若干个含智能体数目相等的类,对多智能体要到达的目标位置也划分为对应数目的类;再对每一个类中的智能体利用遗传算法框架并行化进行路径规划,得到每一类中的最优路径;将各个类中得到的最优路径进行汇总,从而获得整个多智能体系统的最优路径。该方法的使用能够快速实现对大规模多智能体系统的路径规划,为大规模多智能体系统执行任务奠定基础。