
一种基于毫米波雷达和视频融合的车辆检测方法.pdf

绮兰****文章

1/7

2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于毫米波雷达和视频融合的车辆检测方法.pdf
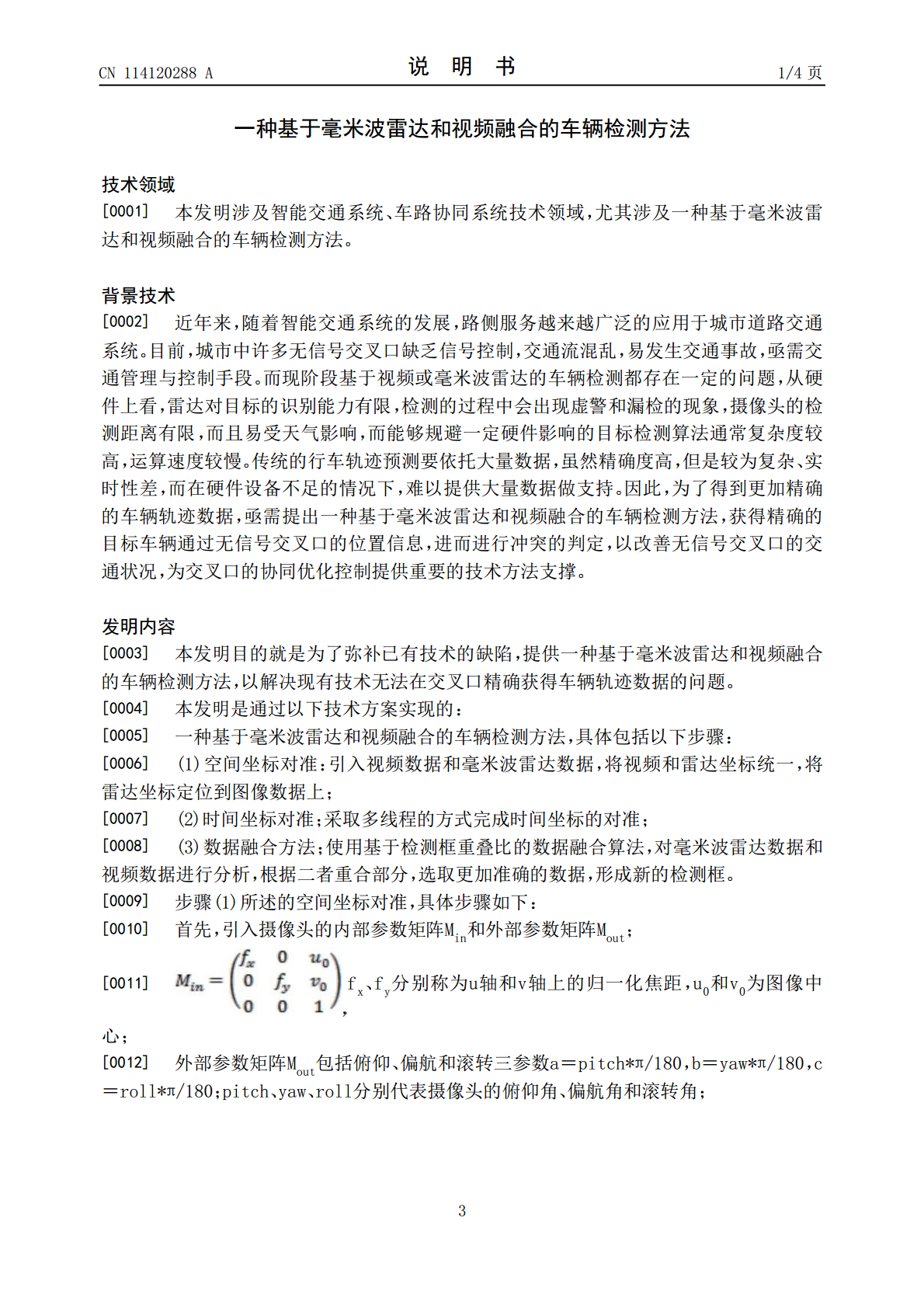
本发明公开了一种基于毫米波雷达和视频融合的车辆检测方法。本发明是通过毫米波雷达检测目标车辆的速度、距离、角度信息,摄像头检测目标车辆的位置和类型,然后在时间和空间上将毫米波雷达和摄像头完成对准,得到最终的检测结果。此方法可广泛应用于智能交通系统、车路协同系统等领域,以改善无信号交叉口的交通状况,为交叉口的协同优化控制提供重要的技术方法支撑。

一种基于毫米波雷达和视频融合的目标检测方法及系统.pdf
本申请提出了基于毫米波雷达和视频融合的目标检测方法及系统,首先过滤毫米波雷达和摄像机所获取的无效目标,缩小检测目标范围;在确保毫米波雷达和摄像机空间同步的情况下,进行毫米波雷达和摄像机检测结果的目标匹配;计算目标检测交并比,根据目标检测交并比判断目标匹配的准确性,对于无法判断识别准确性的情况,进一步采用全局最近邻数据关联算法进行第二次目标匹配,从而实现毫米波雷达和摄像机的检测对象尽可能多的目标匹配,有助于降低目标对象的漏检率,同时保证了识别匹配的准确率。

基于毫米波雷达和机器视觉融合的车辆检测.pptx
,目录PartOnePartTwo毫米波雷达的工作原理机器视觉检测原理融合方法和技术融合的优势和挑战PartThree自动驾驶系统智能交通监控智能停车场车辆安全系统PartFour提高检测精度和可靠性实时性和高效性适应各种环境和天气条件降低成本和提高普及率PartFive数据采集和处理特征提取和匹配目标跟踪和识别结果输出和可视化PartSix实验环境和数据集实验过程和方法实验结果和分析与其他方法的比较和优势分析PartSeven技术改进和创新方向应用领域的拓展和深化面临的挑战和解决方案对行业和社会的影响和

基于毫米波雷达与图像融合的车辆检测.docx
基于毫米波雷达与图像融合的车辆检测基于毫米波雷达与图像融合的车辆检测摘要随着自动驾驶技术的快速发展,车辆检测已成为自动驾驶系统的关键环节之一。本文提出了一种基于毫米波雷达与图像融合的车辆检测方法。通过融合毫米波雷达数据和图像数据,能够提高车辆检测的准确性和鲁棒性。通过实验验证,我们的方法在车辆检测方面取得了较好的效果。关键词:车辆检测、毫米波雷达、图像融合、自动驾驶1.引言车辆检测是无人驾驶技术中的一个重要环节。准确地检测出周围的车辆对于自动驾驶系统来说至关重要。传统的车辆检测方法主要基于图像处理技术,但

基于毫米波雷达与视觉融合的前方车辆检测.docx
基于毫米波雷达与视觉融合的前方车辆检测标题:基于毫米波雷达与视觉融合的前方车辆检测摘要:前方车辆检测对于汽车自动驾驶、安全预警和道路改善等方面具有重要意义。本论文通过对毫米波雷达与视觉融合技术进行研究与探索,提出了一种基于毫米波雷达与视觉融合的前方车辆检测方法。该方法首先通过毫米波雷达获取车辆的距离和速度信息,然后利用视觉技术对车辆进行形状和颜色的检测,最后通过融合算法将两个模态的检测结果进行优化,提高前方车辆检测的准确性和鲁棒性。实验结果表明,该方法在不同天气条件下能够有效地检测前方车辆,具有较高的检测