
一种基于毫米波雷达和视频融合的目标检测方法及系统.pdf

含秀****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于毫米波雷达和视频融合的目标检测方法及系统.pdf
本申请提出了基于毫米波雷达和视频融合的目标检测方法及系统,首先过滤毫米波雷达和摄像机所获取的无效目标,缩小检测目标范围;在确保毫米波雷达和摄像机空间同步的情况下,进行毫米波雷达和摄像机检测结果的目标匹配;计算目标检测交并比,根据目标检测交并比判断目标匹配的准确性,对于无法判断识别准确性的情况,进一步采用全局最近邻数据关联算法进行第二次目标匹配,从而实现毫米波雷达和摄像机的检测对象尽可能多的目标匹配,有助于降低目标对象的漏检率,同时保证了识别匹配的准确率。

一种基于毫米波雷达和视频融合的车辆检测方法.pdf
本发明公开了一种基于毫米波雷达和视频融合的车辆检测方法。本发明是通过毫米波雷达检测目标车辆的速度、距离、角度信息,摄像头检测目标车辆的位置和类型,然后在时间和空间上将毫米波雷达和摄像头完成对准,得到最终的检测结果。此方法可广泛应用于智能交通系统、车路协同系统等领域,以改善无信号交叉口的交通状况,为交叉口的协同优化控制提供重要的技术方法支撑。

一种基于融合图像特征的毫米波雷达目标检测方法及系统.pdf
本发明涉及一种基于融合图像特征的毫米波雷达目标检测方法,该方法包括以下步骤:步骤1:通过图像特征处理模块得到输入图像的3D鸟瞰特征图,并输入至雷达数据特征与图像特征融合模块;步骤2:通过雷达数据特征与图像特征融合模块得到规范化后的雷达特征图,并将其与3D鸟瞰特征图进行融合,得到融合后的特征图;步骤3:基于融合后的特征图对目标检测模块的目标检测网络进行训练;步骤4:目标检测网络训练完成后,输入雷达数据进行目标检测,与现有技术相比,本发明具有提高自动驾驶汽车目标检测的准确率以及避免了恶劣天气条件下激光雷达和相
一种基于视觉和毫米波雷达的融合目标检测和跟踪方法.pdf
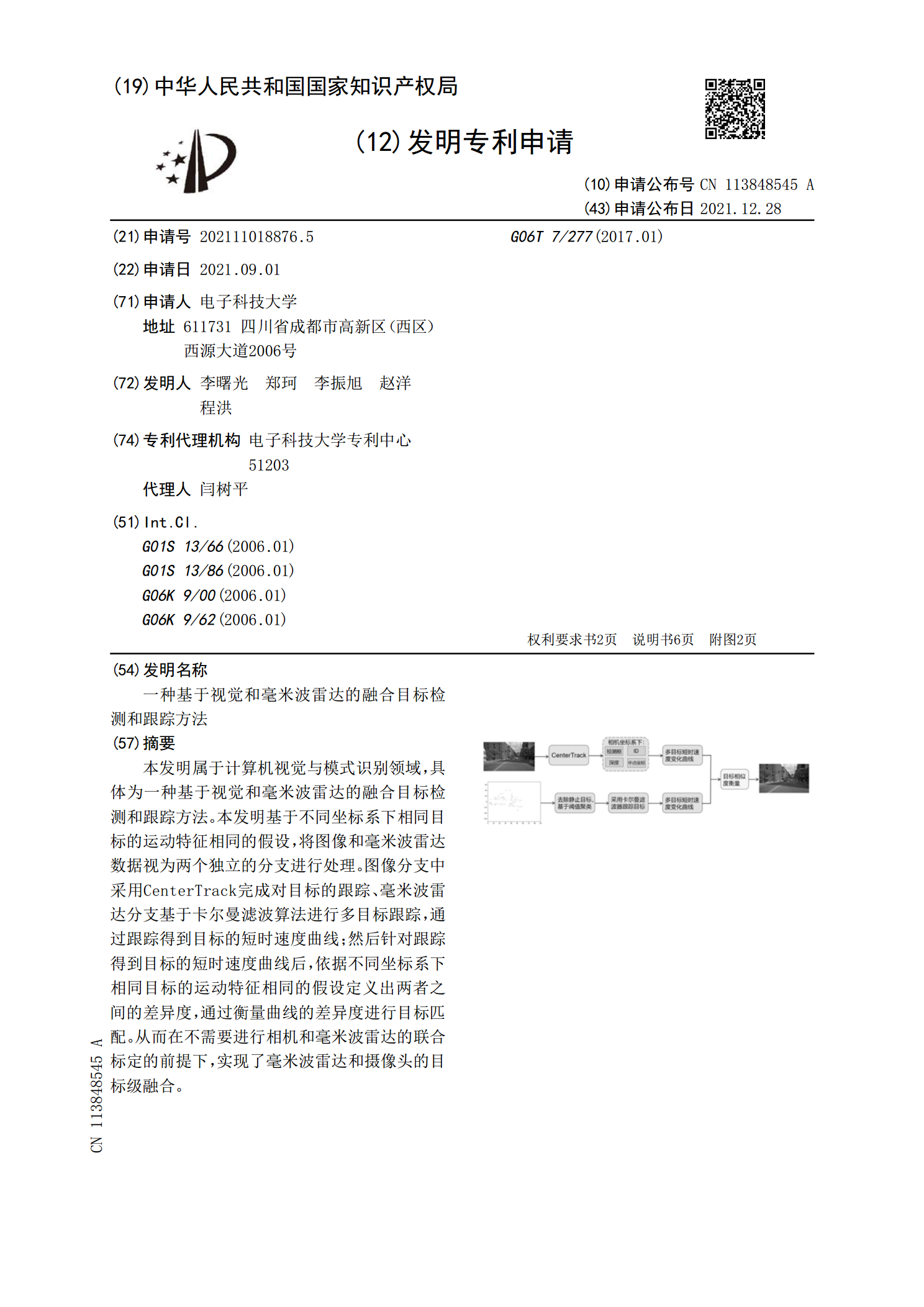
本发明属于计算机视觉与模式识别领域,具体为一种基于视觉和毫米波雷达的融合目标检测和跟踪方法。本发明基于不同坐标系下相同目标的运动特征相同的假设,将图像和毫米波雷达数据视为两个独立的分支进行处理。图像分支中采用CenterTrack完成对目标的跟踪、毫米波雷达分支基于卡尔曼滤波算法进行多目标跟踪,通过跟踪得到目标的短时速度曲线;然后针对跟踪得到目标的短时速度曲线后,依据不同坐标系下相同目标的运动特征相同的假设定义出两者之间的差异度,通过衡量曲线的差异度进行目标匹配。从而在不需要进行相机和毫米波雷达的联合标定

基于车载毫米波雷达的多目标检测方法和系统.pdf
本发明涉及目标检测技术领域,提供一种基于车载毫米波雷达的多目标检测方法和系统。方法包括:根据状态模型构建多目标检测的状态转移函数;根据量测模型构建多目标检测的似然函数;以所述多目标观测集合为输入量,通过粒子滤波器得到多目标检测结果;所述粒子滤波器是基于所述状态转移函数和所述似然函数构建的。本发明通过随机有限集框架下的状态转移函数和似然函数构建粒子滤波器,能够有效避免滤波过程中由于数据关联产生的干扰,从而使得多目标检测任务在具有杂波和误检的场景下,仍然可以得到准确的检测结果。