
一种基于卷积神经网络的靶面弹着点的检测和定位方法.pdf

明轩****la


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于卷积神经网络的靶面弹着点的检测和定位方法.pdf
本发明公开了一种基于卷积神经网络的靶面弹着点检测和定位方法,属于图像检测领域。旨在更精确定位靶面上弹着点的中心圆点坐标位置,提高报靶的分辨率和精度。所述检测和定位方法首先通过摄像头采集靶面图像,通过对靶面图像进行处理,得到像素点阵列表述的目标图像,然后对目标图像进行亮度色差判定,对通过判定的像素点构建矩形框,得到候选矩形框集;采用卷积神经网络全连接层处理该候选矩形框集得到一组特征向量,并通过分类器进行判定,最后利用回归器得到靶面弹着点的准确位置。

基于被动声定位的大靶面弹着点坐标测量方法研究的中期报告.docx
基于被动声定位的大靶面弹着点坐标测量方法研究的中期报告一、研究背景在实际的军事应用和工业制造等领域中,精准的弹道测量和弹着点坐标测量是非常重要的,而被动声定位技术因其无需发射信号即可定位目标的特点,在这方面有着广泛的应用前景。本研究旨在基于被动声定位技术,研究大靶面弹着点坐标测量方法,以提高其精准度和可靠性,并实现在实际应用中的有效应用。二、研究内容1.研究被动声定位原理及相关算法,包括波达定位法、梅森角、TDOA等方法,并分析各自的优缺点。2.基于混响环境下的信号处理和声源定位方法,建立大靶面上的弹着点

基于卷积神经网络的地震面波检测方法.pdf
本发明提供一种基于卷积神经网络的地震面波检测方法,该基于卷积神经网络的地震面波检测方法包括:步骤1,对地震资料做预处理;步骤2,使用卷积网络提取地震信号的高维特征;步骤3,使用反卷积网络生成面波分布区域。该基于卷积神经网络的地震面波检测方法针对地震叠前数据中面波噪音无法自动精确定位的问题,通过卷积神经网络能够自动检测面波在地震叠前信号中的分布区域,可提高面波标注的精度和智能程度。

一种基于卷积神经网络的人形靶分割方法.pdf
本发明公开了一种基于卷积神经网络的人形靶分割方法,属于计算机视觉识别领域,用以解决目前人形靶分割精度不高,人形靶识别分割速度慢及对复杂场景的适应能力较低的问题。方法包括:确定人形靶目标图像数据集,通过深度卷积网络提取图像特征,并利用得到的特征图构建FPN网络;将FPN网络特征同时输入一个分类网络及一个分割网络,两个网络并行执行;将两个网络的输出结果融合之后得到分割后的人形靶特征图,最后通过确定人形靶的位置信息,将人形靶区域从图像中截取出来,剔除背景的干扰,提高后续的弹孔检测速度与精度。该方法实现了快速高效
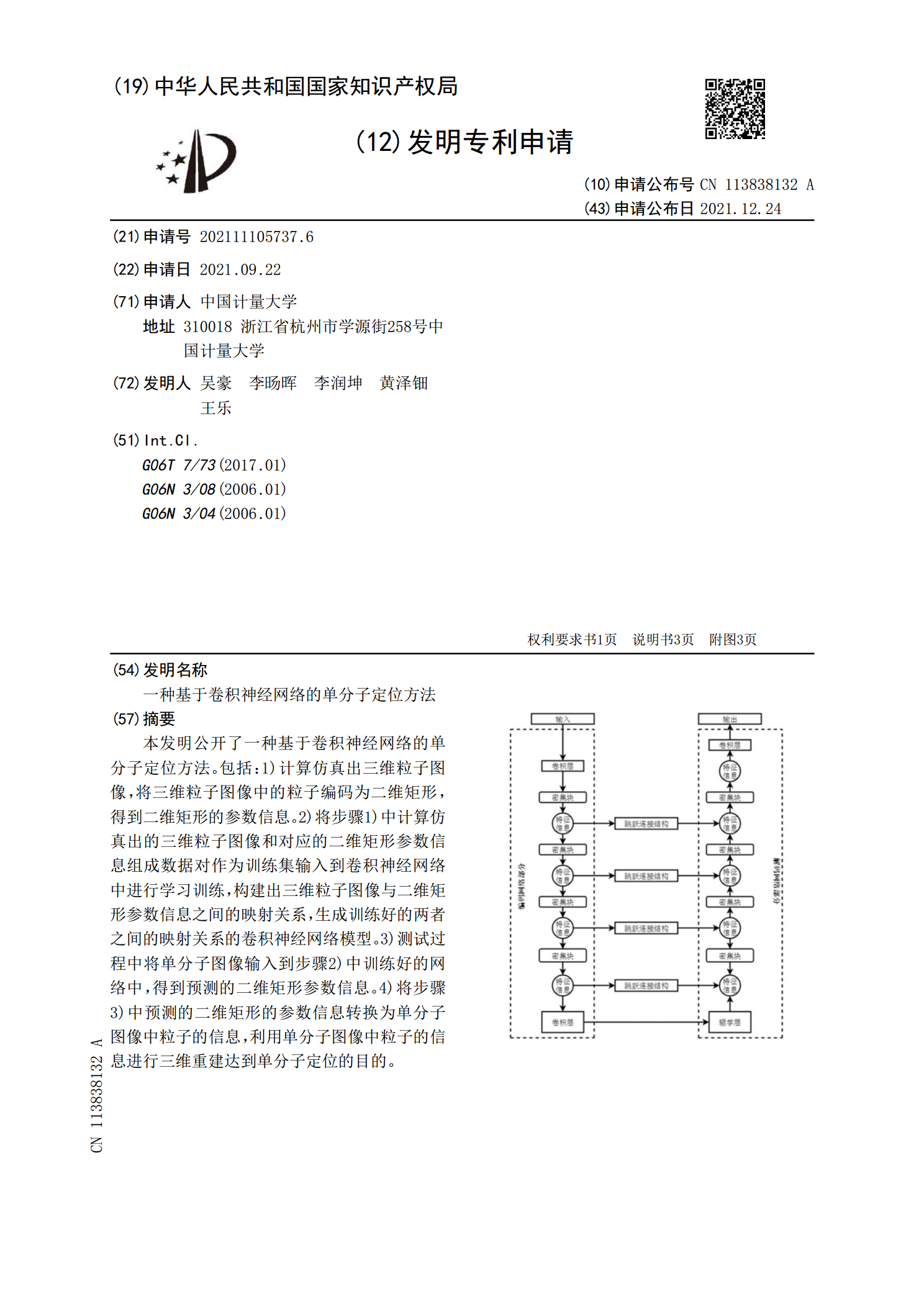
一种基于卷积神经网络的单分子定位方法.pdf
本发明公开了一种基于卷积神经网络的单分子定位方法。包括:1)计算仿真出三维粒子图像,将三维粒子图像中的粒子编码为二维矩形,得到二维矩形的参数信息。2)将步骤1)中计算仿真出的三维粒子图像和对应的二维矩形参数信息组成数据对作为训练集输入到卷积神经网络中进行学习训练,构建出三维粒子图像与二维矩形参数信息之间的映射关系,生成训练好的两者之间的映射关系的卷积神经网络模型。3)测试过程中将单分子图像输入到步骤2)中训练好的网络中,得到预测的二维矩形参数信息。4)将步骤3)中预测的二维矩形的参数信息转换为单分子图像中