
高压输电线路异物自动清除飞行器及其自动清除方法.pdf

东耀****哥哥

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
高压输电线路异物自动清除飞行器及其自动清除方法.pdf
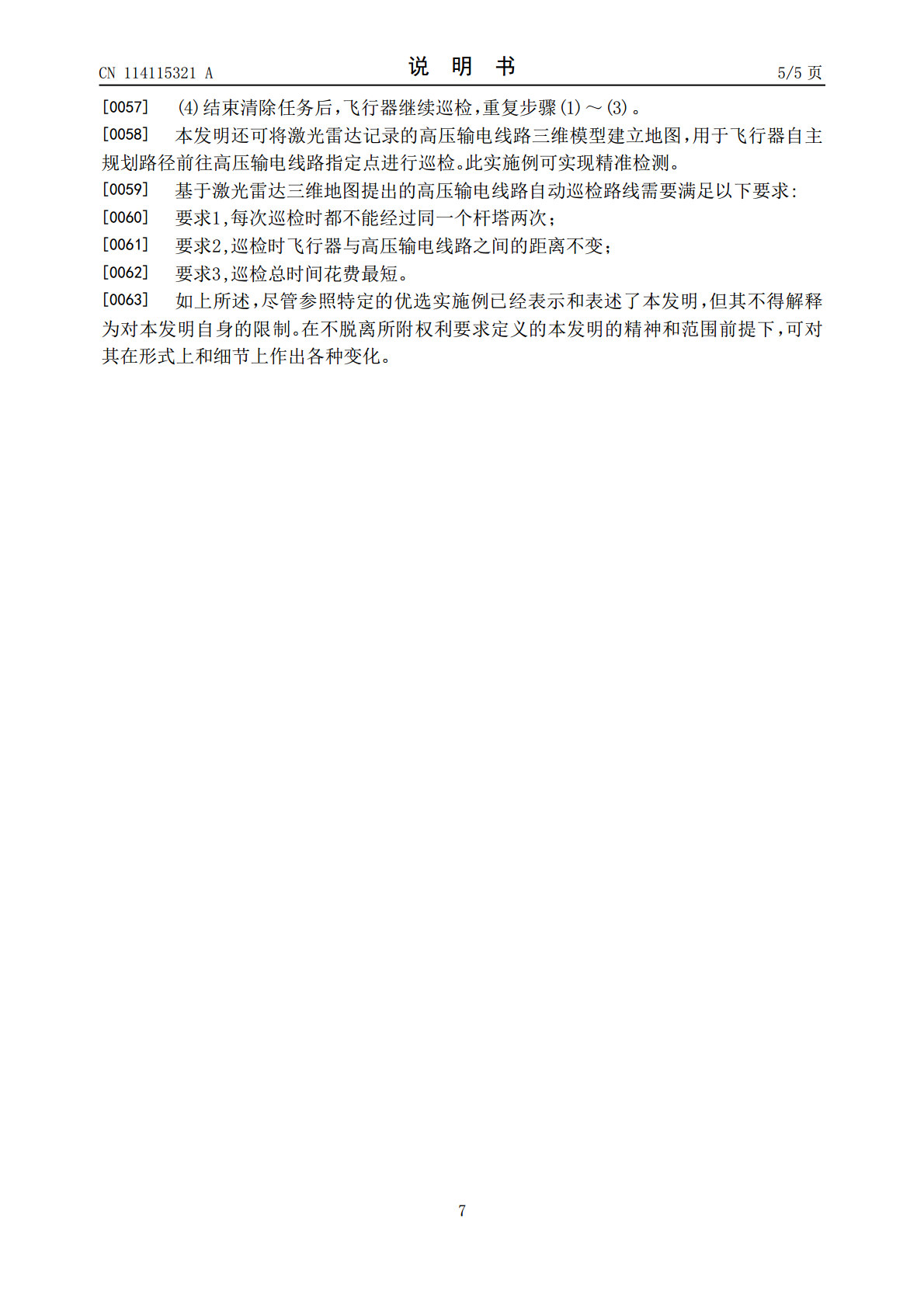
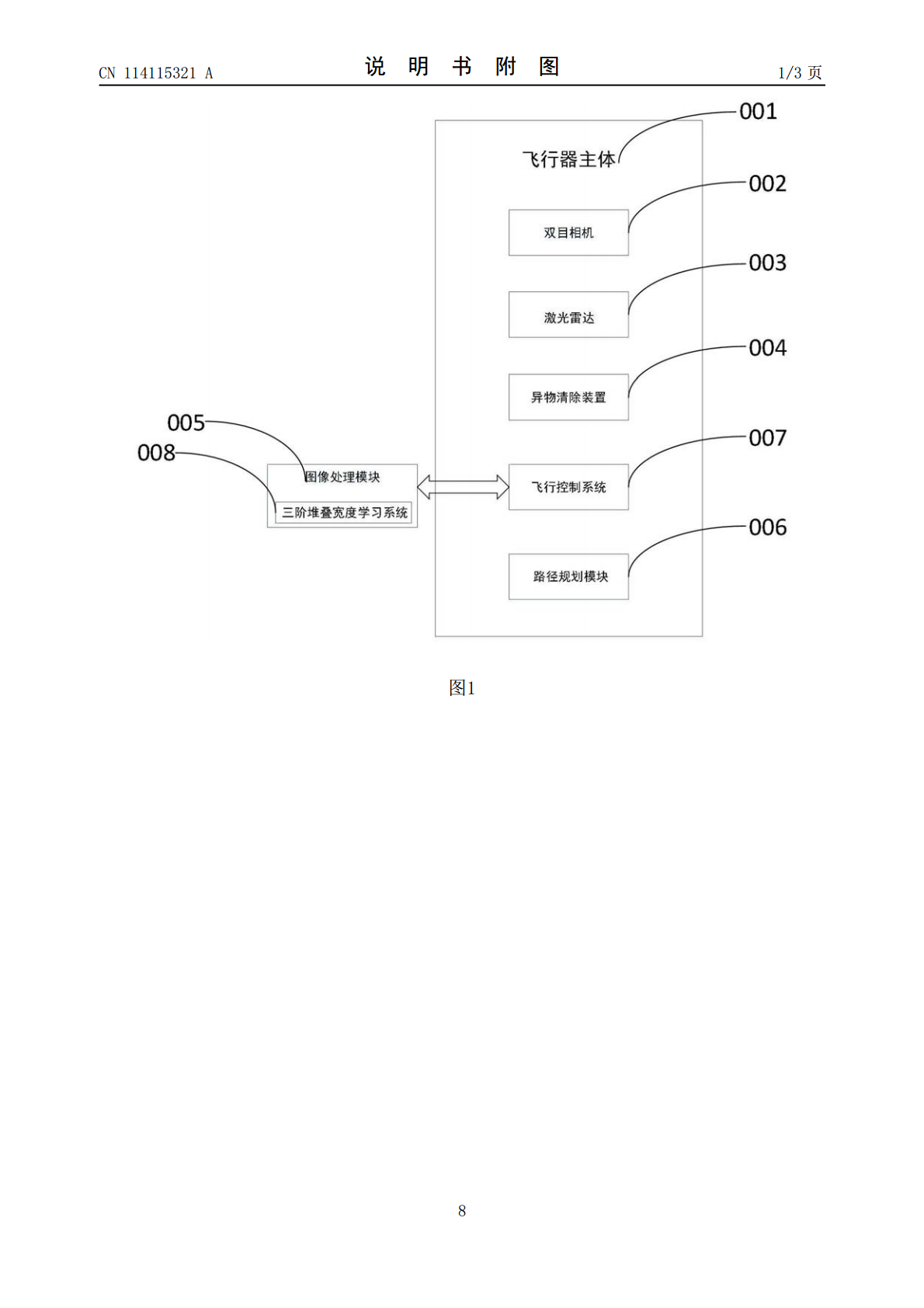
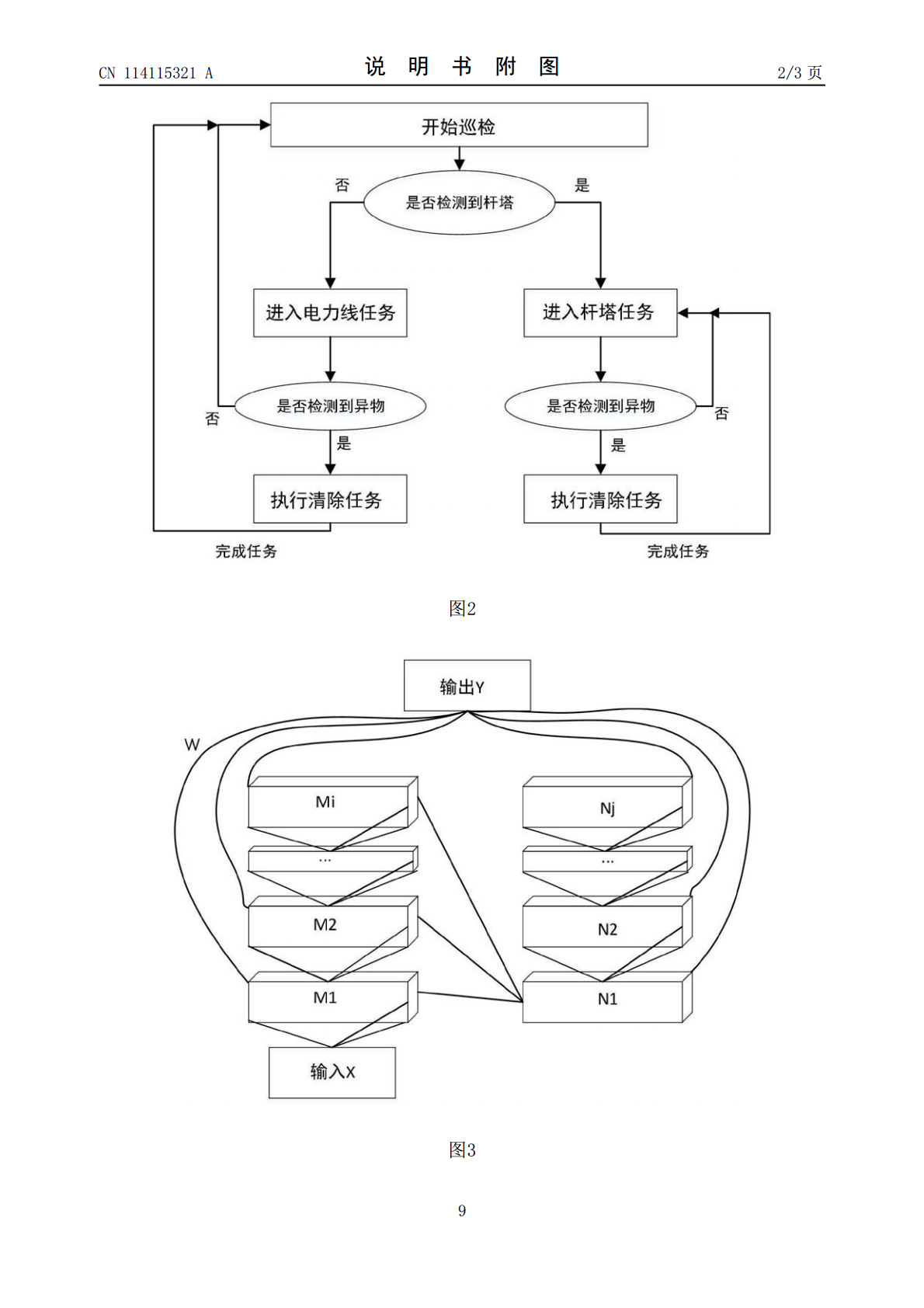
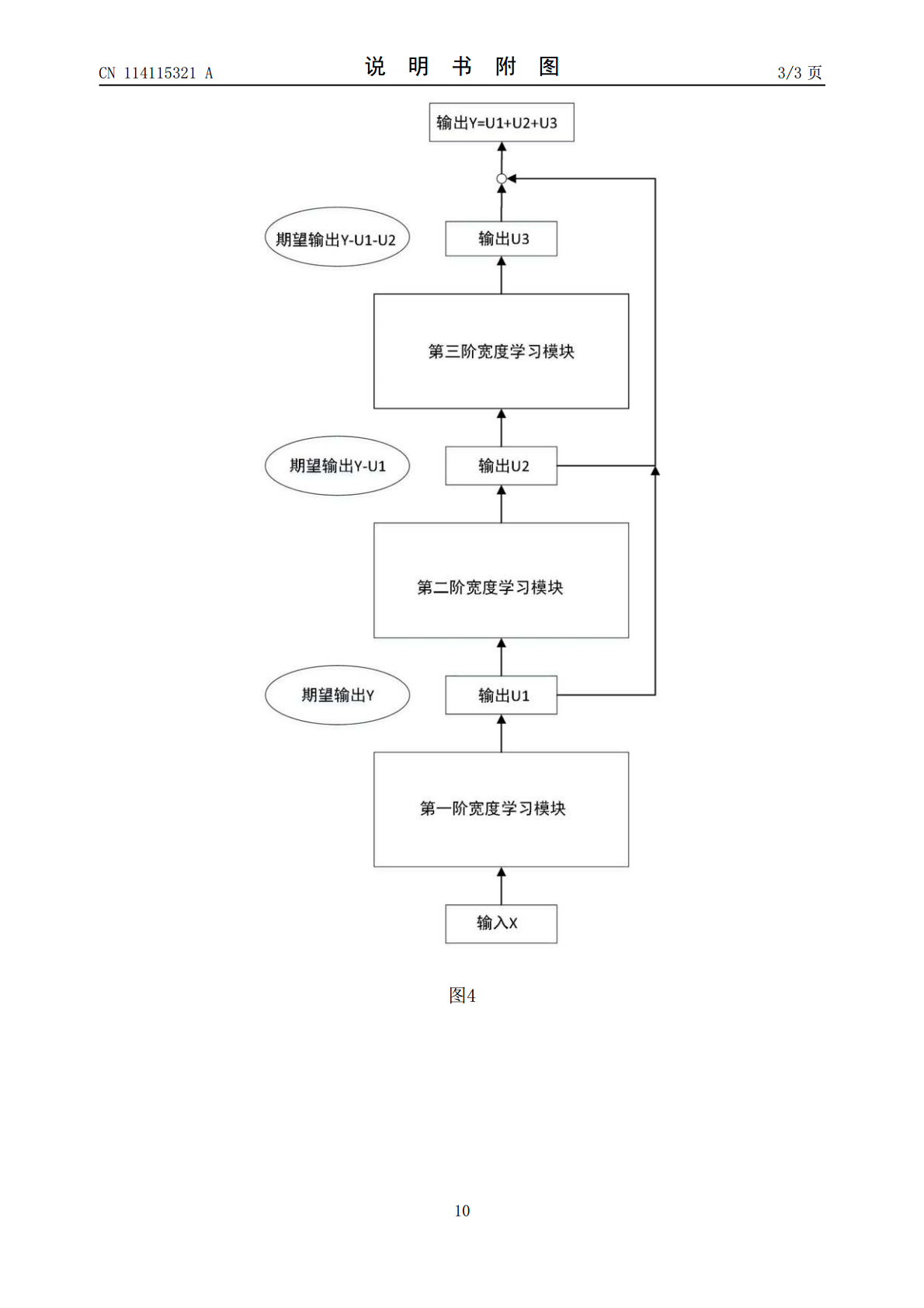
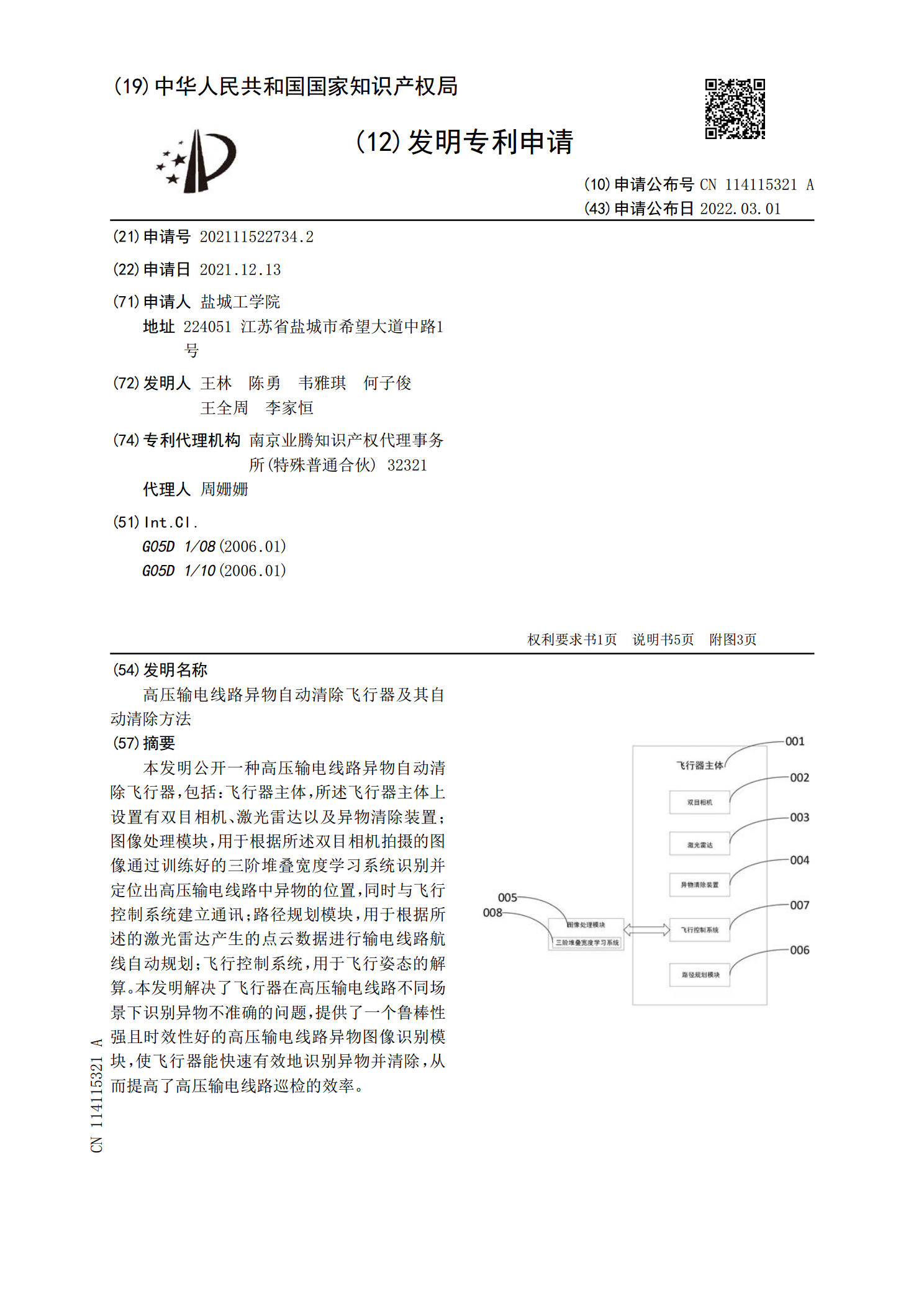
本发明公开一种高压输电线路异物自动清除飞行器,包括:飞行器主体,所述飞行器主体上设置有双目相机、激光雷达以及异物清除装置;图像处理模块,用于根据所述双目相机拍摄的图像通过训练好的三阶堆叠宽度学习系统识别并定位出高压输电线路中异物的位置,同时与飞行控制系统建立通讯;路径规划模块,用于根据所述的激光雷达产生的点云数据进行输电线路航线自动规划;飞行控制系统,用于飞行姿态的解算。本发明解决了飞行器在高压输电线路不同场景下识别异物不准确的问题,提供了一个鲁棒性强且时效性好的高压输电线路异物图像识别模块,使飞行器能快

一种输电线路上用的自动清除异物装置.pdf
本发明涉及一种输电线路上用的自动清除异物装置,属于电力技术领域,装置包括支撑架及铰接于其周边的一组清理筒,清理筒为两瓣式分体结构,其内部沿输电线路方向布置有不少于两组的行走机构,行走机构包括上下对称设置的一对行走轮及第一电机;清理筒内部还设置有清扫机构,清扫机构包括四个毛刷辊及第二电机,毛刷辊包括轴辊及其表面的毛刷,清理筒一端设置有横截面为L型的安装环,其下凹处安装有两瓣式结构的石墨环,石墨环外围安装有切割机构,切割机构包括带有驱动机构的转动环及其外侧沿环形设置的一组切割刀。本发明能够实现悬挂物和覆盖物的

架空输电线路异物清除方法.pdf
本发明提供一种架空输电线路异物清除方法,由架空输电线路异物清除装置和辅助工具实施,包括①安装吊装滑轮、②安装辅助绳索、③架空输电线路异物清除装置吊装上线、④架空输电线路异物清除装置牵引就位、⑤异物清除、⑥完成关电、⑦撤场等步骤,方法的原理是利用烧红的电阻丝对输电线路上的异物进行热切割和清除。本发明无需线路停电,能够对输电线上的各种异物进行干净、有效、彻底的清除,清除异物效率高、效果好;操作方便、省时省力、提高工效。

输电线路异物清除装置.pdf
本发明提供一种输电线路异物清除装置,电力输电线路检修维护技术领域,该装置包括架体、导线行走滚轮、刀片、绝缘绳索和绳索装配部,导线行走滚轮配装在架体上,导线行走滚轮的两侧分别固定配装刀片,绳索装配部固定配装在架体的下端,绝缘绳索配装在绳索装配部。采用本发明对输电线上的异物进行清除时,操作人员将输电线路异物清除装置挂在输电线上,人工拉动绝缘绳索,导线行走滚轮在输电线上行走,同时导线行走滚轮的行走带动两侧滚轮的刀片旋转,刀片在旋转的过程中对异物进行旋切,旋切后,输电线上的异物自动跌落至地面,从而达到了异物清除的
输电线路异物清除装置.pdf
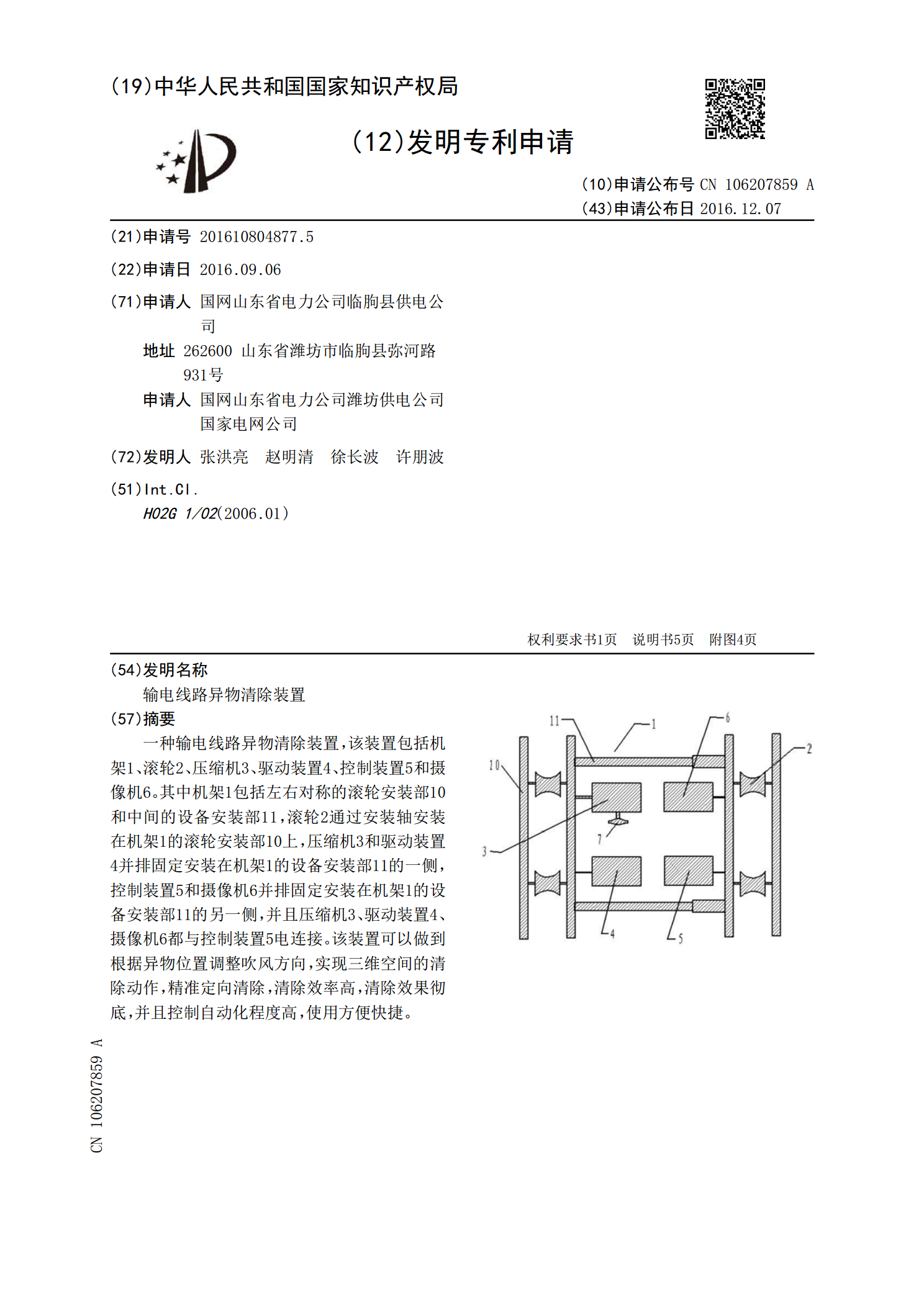
一种输电线路异物清除装置,该装置包括机架1、滚轮2、压缩机3、驱动装置4、控制装置5和摄像机6。其中机架1包括左右对称的滚轮安装部10和中间的设备安装部11,滚轮2通过安装轴安装在机架1的滚轮安装部10上,压缩机3和驱动装置4并排固定安装在机架1的设备安装部11的一侧,控制装置5和摄像机6并排固定安装在机架1的设备安装部11的另一侧,并且压缩机3、驱动装置4、摄像机6都与控制装置5电连接。该装置可以做到根据异物位置调整吹风方向,实现三维空间的清除动作,精准定向清除,清除效率高,清除效果彻底,并且控制自动化