
道路障碍物检测装置、道路障碍物检测方法及计算机可读记录介质.pdf

长春****主a

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
道路障碍物检测装置、道路障碍物检测方法及计算机可读记录介质.pdf
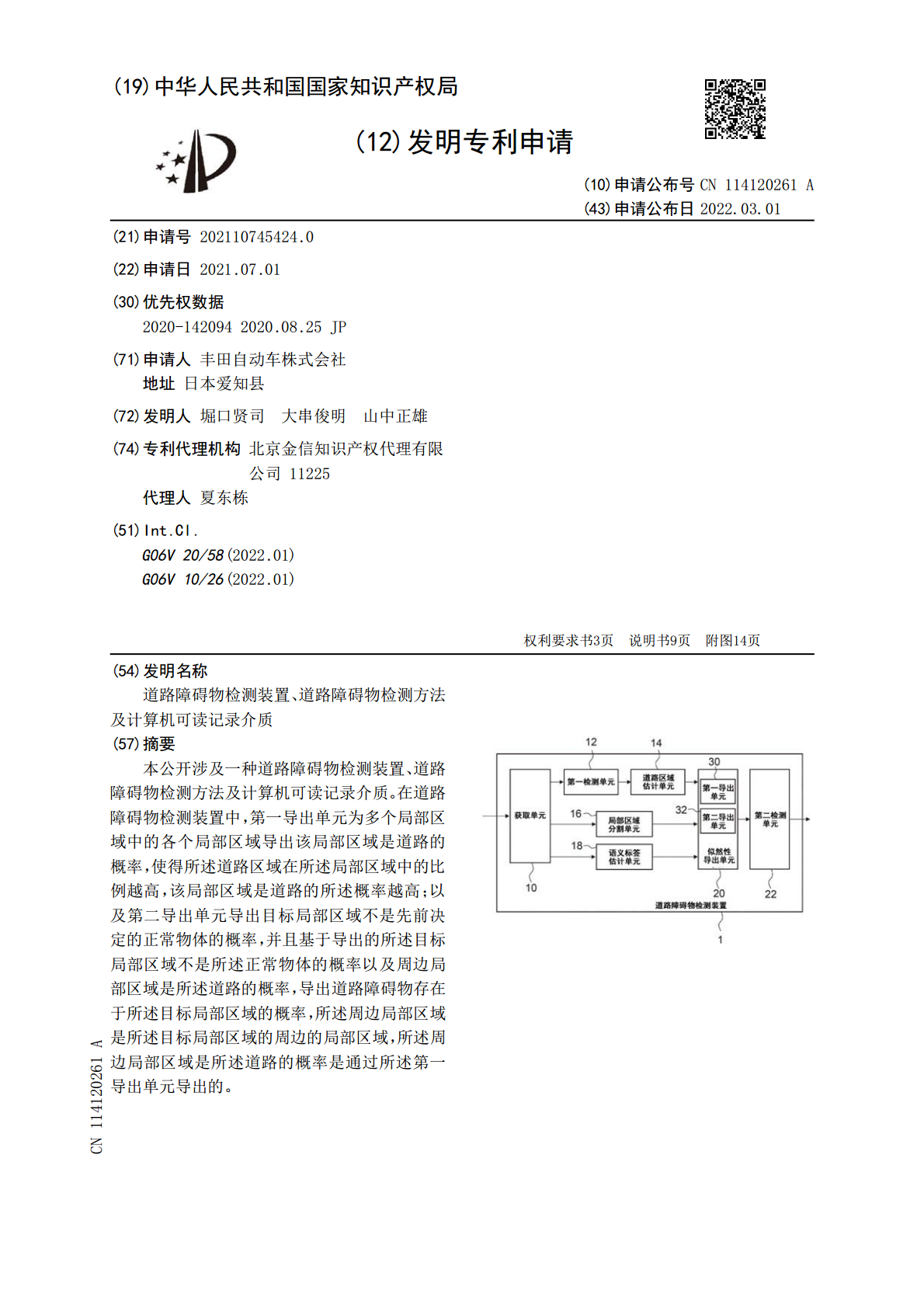
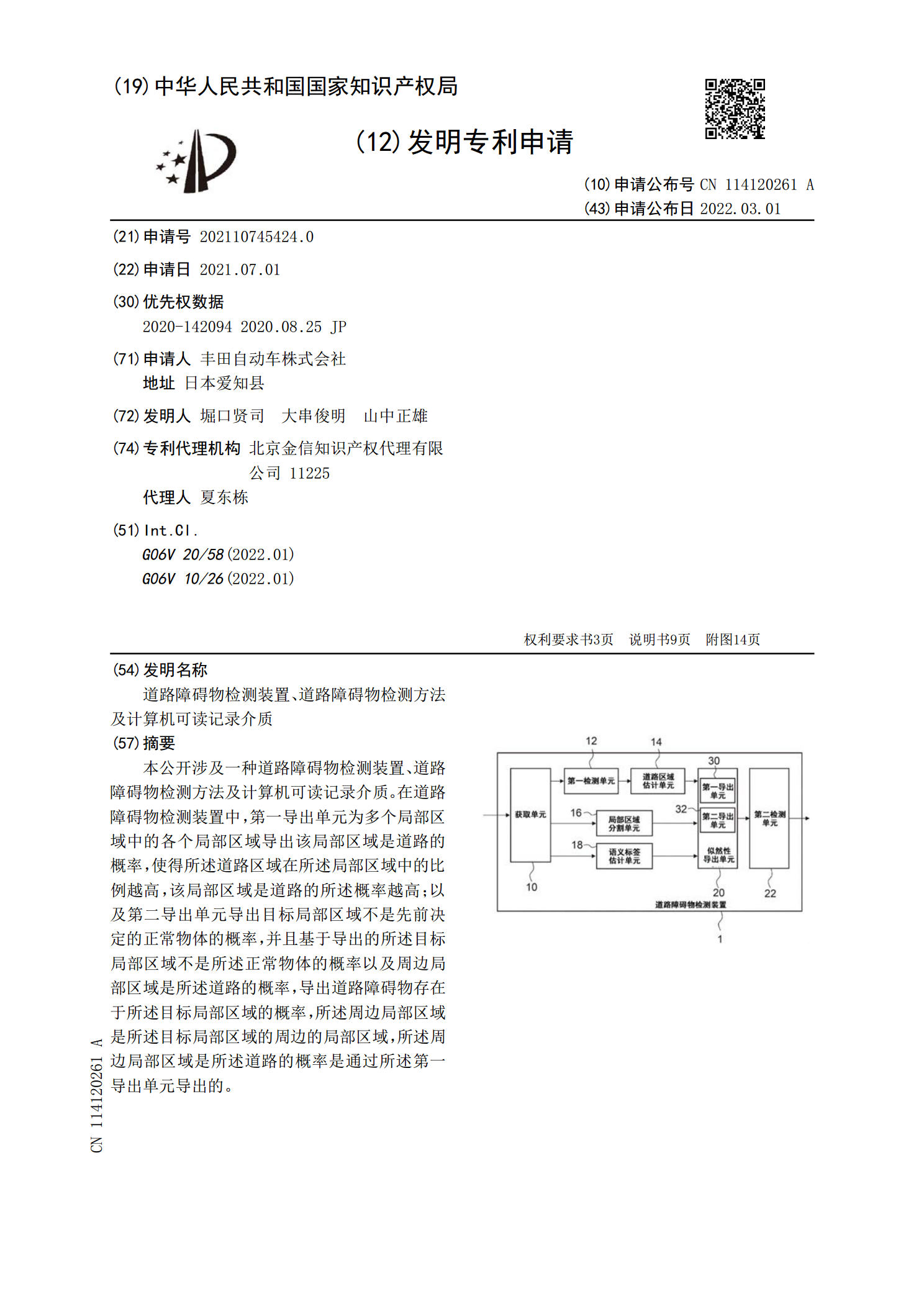
本公开涉及一种道路障碍物检测装置、道路障碍物检测方法及计算机可读记录介质。在道路障碍物检测装置中,第一导出单元为多个局部区域中的各个局部区域导出该局部区域是道路的概率,使得所述道路区域在所述局部区域中的比例越高,该局部区域是道路的所述概率越高;以及第二导出单元导出目标局部区域不是先前决定的正常物体的概率,并且基于导出的所述目标局部区域不是所述正常物体的概率以及周边局部区域是所述道路的概率,导出道路障碍物存在于所述目标局部区域的概率,所述周边局部区域是所述目标局部区域的周边的局部区域,所述周边局部区域是所述

障碍物检测方法、系统、电子装置及计算机可读存储介质.pdf
本发明提供了一种障碍物检测方法、系统、电子装置及计算机可读存储介质,包括对机器人的前方区域进行三维地图构建,得到目标三维地图,并将所述机器人的当前位置记为参照定位信息;使用所述参照定位信息将所述目标三维地图与预先构建的标准三维地图的局部进行匹配;使用预先在所述目标三维地图中规划出的标准行走路径在所述目标三维地图中规划出需要检测的路径,得到目标检测路径;对所述标准三维地图中的所述目标检测路径进行障碍物检测。运用本技术方案可以对双足机器人的前方路径进行障碍物实时检测,以使得双足机器人及时的正确的作出应变的行走
障碍物检测方法、装置、避障设备及计算机可读存储介质.pdf
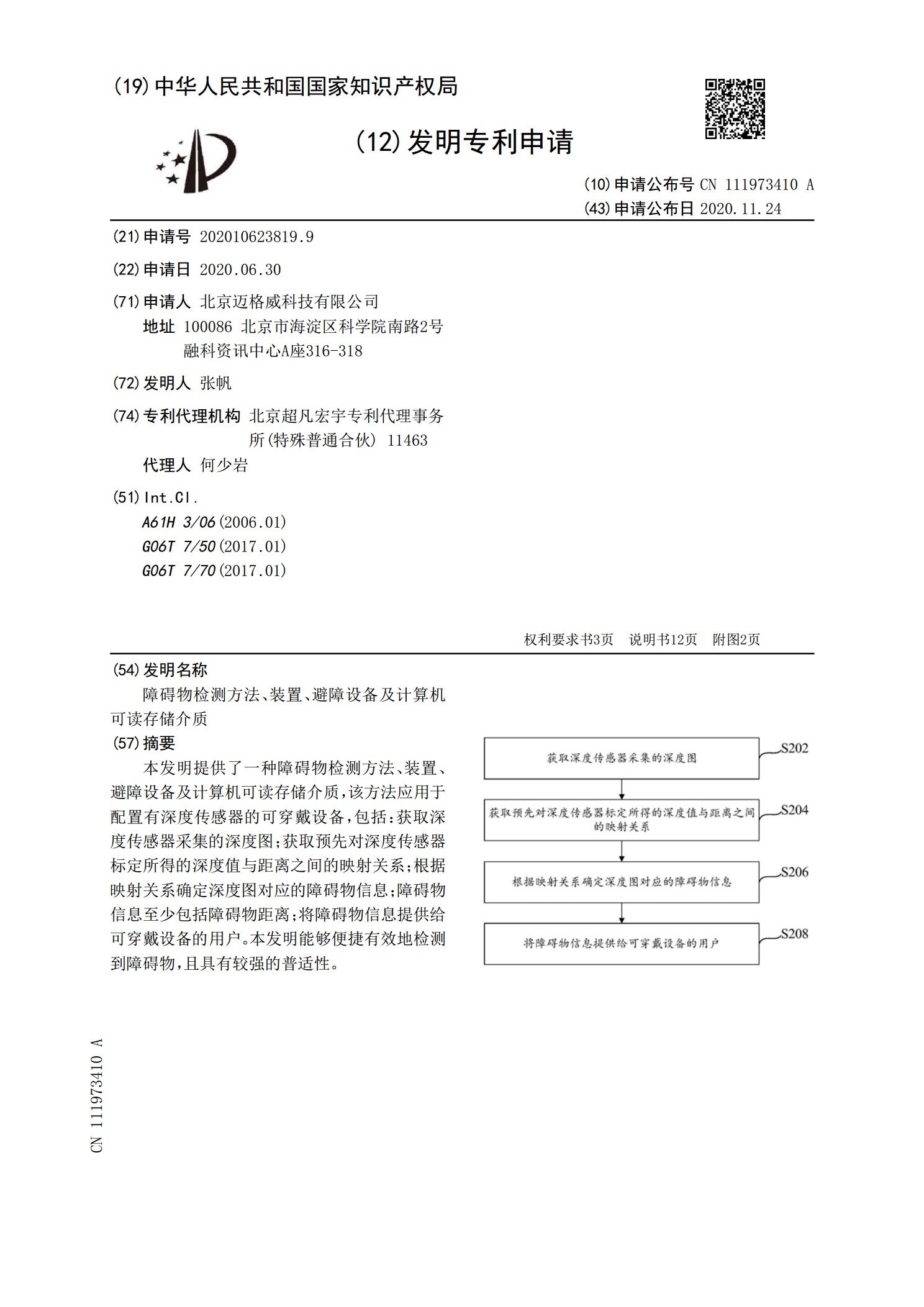
本发明提供了一种障碍物检测方法、装置、避障设备及计算机可读存储介质,该方法应用于配置有深度传感器的可穿戴设备,包括:获取深度传感器采集的深度图;获取预先对深度传感器标定所得的深度值与距离之间的映射关系;根据映射关系确定深度图对应的障碍物信息;障碍物信息至少包括障碍物距离;将障碍物信息提供给可穿戴设备的用户。本发明能够便捷有效地检测到障碍物,且具有较强的普适性。
障碍物检测方法、装置、传感器及可读存储介质.pdf
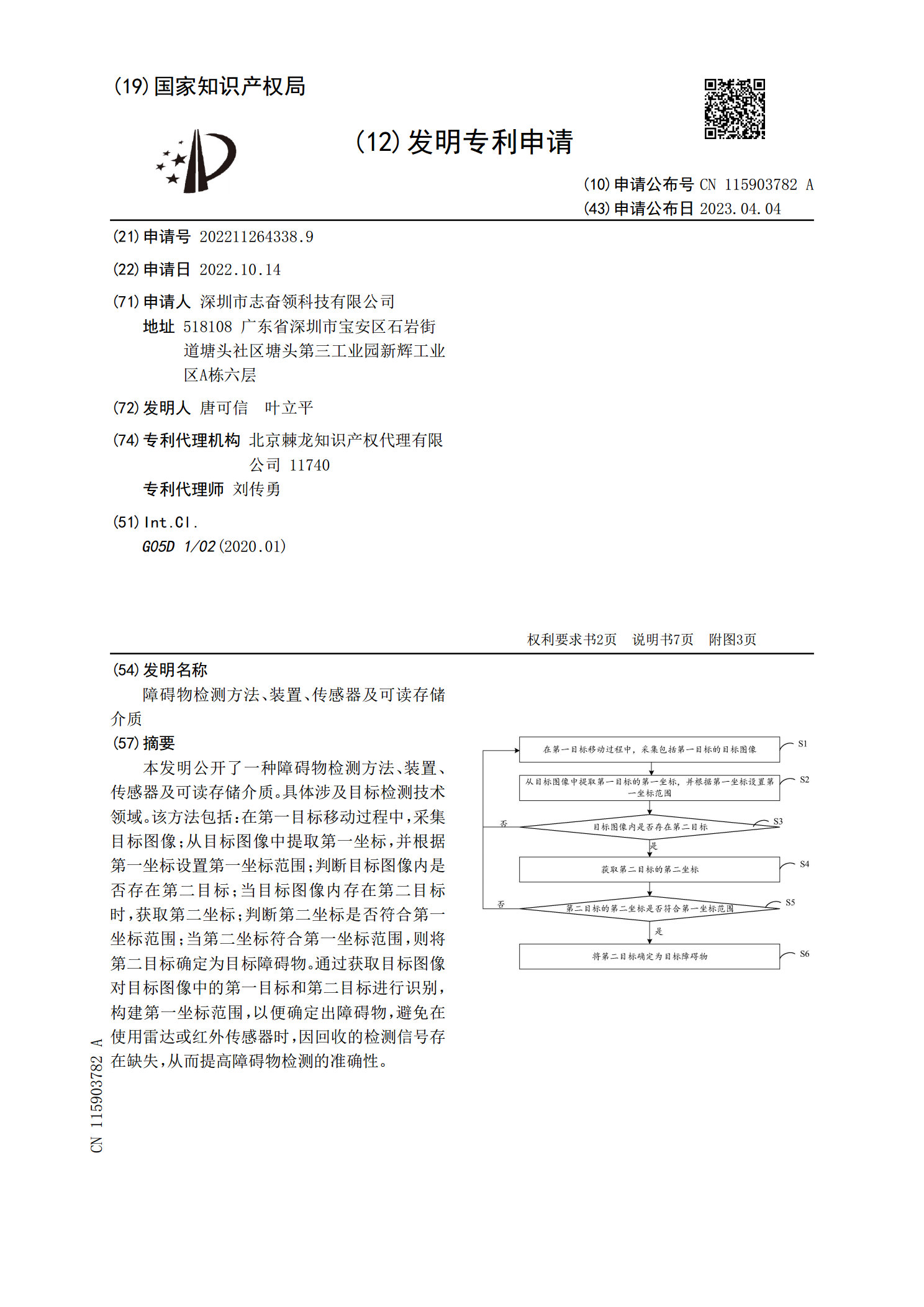
本发明公开了一种障碍物检测方法、装置、传感器及可读存储介质。具体涉及目标检测技术领域。该方法包括:在第一目标移动过程中,采集目标图像;从目标图像中提取第一坐标,并根据第一坐标设置第一坐标范围;判断目标图像内是否存在第二目标;当目标图像内存在第二目标时,获取第二坐标;判断第二坐标是否符合第一坐标范围;当第二坐标符合第一坐标范围,则将第二目标确定为目标障碍物。通过获取目标图像对目标图像中的第一目标和第二目标进行识别,构建第一坐标范围,以便确定出障碍物,避免在使用雷达或红外传感器时,因回收的检测信号存在缺失,从

地面障碍物检测方法、设备及计算机可读存储介质.pdf
本发明公开了一种地面障碍物检测方法、设备及计算机可读存储介质,所述方法包括:当基于车体上所安装的摄像装置检测到障碍物时,对各所述障碍物进行预设方向上的投影,生成各所述障碍物的投影高度;根据各所述投影高度,将各所述障碍物划分为第一障碍物和第二障碍物,并识别所述第一障碍物在预设方向的第一轮廓;对所述第二障碍物进行纹理边缘检测,生成所述第二障碍物的第二轮廓;根据所述第一轮廓和所述第二轮廓,确定与所述车体所在位置距离最近的目标障碍物。本发明对于高障碍物不会因车体晃动对图像处理产生干扰,确保了识别的准确性;同时,对