
枪球联动的目标跟踪方法、装置、电子装置和存储介质.pdf

是你****芹呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

枪球联动的目标跟踪方法、装置、电子装置和存储介质.pdf
本申请涉及一种枪球联动的目标跟踪方法、装置、电子装置和存储介质,其中,该方法包括:利用球机在预设监控区域识别目标,并对目标进行跟踪;基于球机坐标和全景坐标之间的坐标映射关系,将球机对目标进行跟踪得到的球机跟踪信息,由球机坐标转换到全景坐标,得到目标的全景跟踪信息;控制枪机基于全景跟踪信息,利用目标匹配算法,在全景坐标下对目标进行识别并跟踪。通过本申请,解决了相关技术中存在无法先发现具有特定细节的目标,再对该目标进行跟踪,容易遗漏特定目标的跟踪的问题,实现了在枪机无法识别特定细节的情况下对具有特定细节的目标

球机的变倍跟踪方法及装置、存储介质及电子装置.pdf
本发明公开了一种球机的变倍跟踪方法及装置、存储介质及电子装置,其中,上述方法包括:基于事件上报信息,获取球机的变倍参数对应的多帧变倍参数值,并获取所述多帧变倍参数值的平均变倍参数值;确定所述平均变倍参数值与预先获取的基准变倍参数值的基准差值;在根据所述基准差值确定所述平均变倍参数值为有效值的情况下,确定所述平均变倍参数值是否小于所述球机的最大变倍倍率值,所述最大变倍倍率值为所述球机的最大变倍倍率对应的变倍参数值;在所述平均变倍参数值大于所述球机的最大变倍倍率值的情况下,控制所述球机根据所述基准变倍参数值进

对象跟踪方法和装置、存储介质及电子装置.pdf
本发明公开了一种对象跟踪方法和装置、存储介质及电子装置。该方法包括:获取至少一个图像采集设备采集到的至少一张图像;根据至少一张图像获取目标对象的第一外观特征和目标对象的第一时空特征;获取目标对象与当前已记录的全局跟踪对象队列中每个全局跟踪对象之间的外观相似度和时空相似度;在根据外观相似度和时空相似度确定出目标对象与目标全局跟踪对象相匹配的情况下,为目标对象分配与目标全局跟踪对象对应的目标全局标识;利用目标全局标识确定与目标对象关联的多个图像采集设备所采集到的多张关联图像;根据多张关联图像生成与目标对象相匹

目标跟踪方法及装置、存储介质和电子设备.pdf
本发明公开了一种目标跟踪方法、目标跟踪装置、存储介质和电子设备,涉及计算机视觉技术领域。该目标跟踪方法包括:提取目标区域图像的全局特征;其中,目标区域图像为当前帧图像的上一帧图像中预测出的包含目标对象的区域图像;利用初始区域图像的全局特征对目标区域图像的全局特征进行注意力校准,并将校准后的特征作为上一帧图像的目标校准特征;结合上一帧图像的目标校准特征,确定出当前帧图像的目标判断特征;确定当前帧图像的全局特征,从当前帧图像的全局特征中确定与目标判断特征匹配的特征部分,并将特征部分对应的图像区域确定为当前帧图
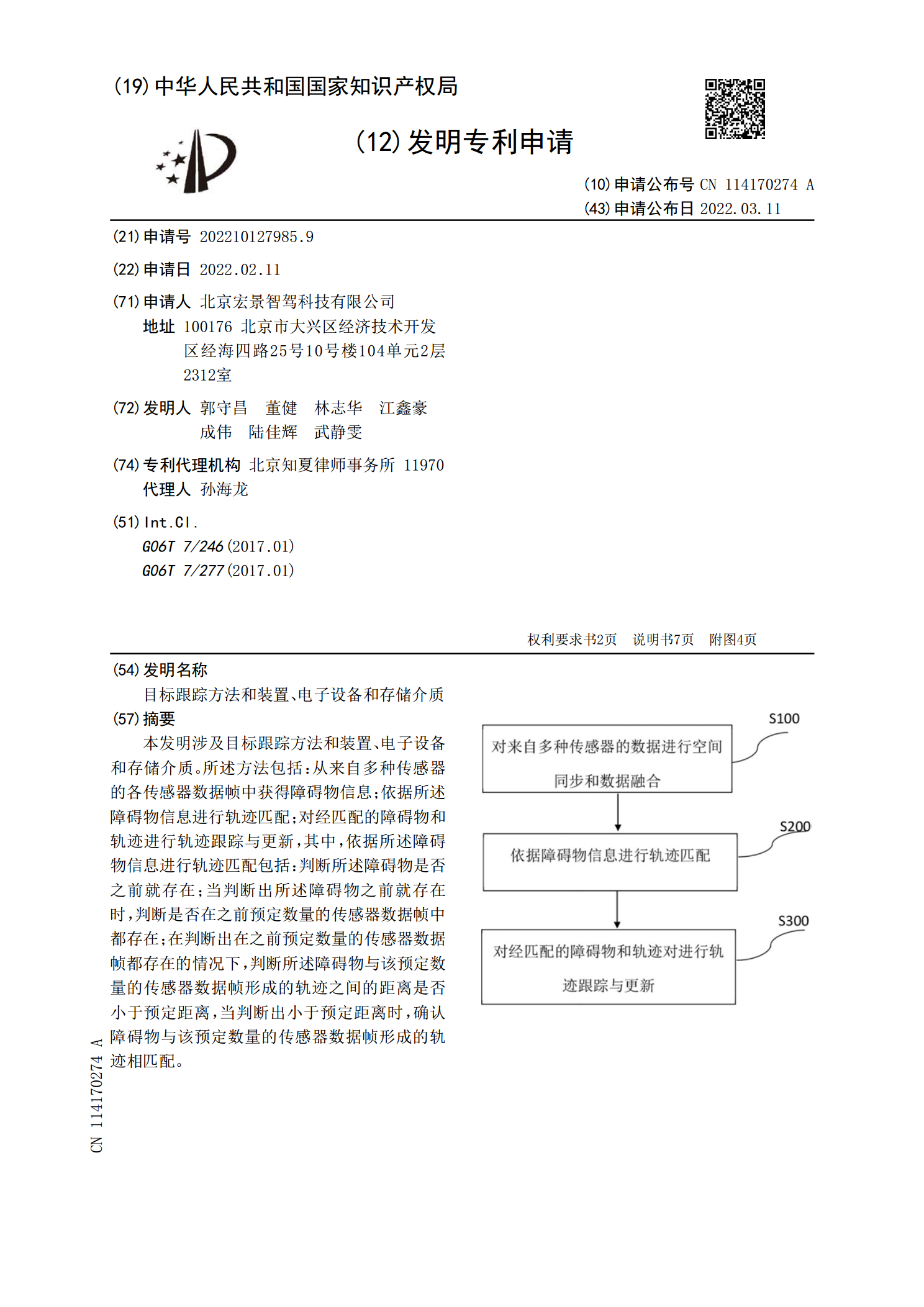
目标跟踪方法和装置、电子设备和存储介质.pdf
本发明涉及目标跟踪方法和装置、电子设备和存储介质。所述方法包括:从来自多种传感器的各传感器数据帧中获得障碍物信息;依据所述障碍物信息进行轨迹匹配;对经匹配的障碍物和轨迹进行轨迹跟踪与更新,其中,依据所述障碍物信息进行轨迹匹配包括:判断所述障碍物是否之前就存在;当判断出所述障碍物之前就存在时,判断是否在之前预定数量的传感器数据帧中都存在;在判断出在之前预定数量的传感器数据帧都存在的情况下,判断所述障碍物与该预定数量的传感器数据帧形成的轨迹之间的距离是否小于预定距离,当判断出小于预定距离时,确认障碍物与该预定