
双卷扬同步控制方法、装置、作业机械、设备及介质.pdf

宜欣****外呢


1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

双卷扬同步控制方法、装置、作业机械、设备及介质.pdf
本发明提供一种双卷扬同步控制方法、装置、作业机械、设备及介质,本发明提供的双卷扬同步控制方法、装置、作业机械、设备及介质,通过根据机械主臂的工作角度和编码器检测差值计算模型获取编码器目标差值数据,进而利用主卷扬的驱动电流和编码器目标差值数据对副卷扬的驱动电流进行补偿,保证主卷扬与副卷扬始终同步,从而提高了同步控制过程的精度;同时,由于该方法基于预先构建的编码器检测差值计算模型计算编码器目标差值数据,不依赖外部传感器与控制器的无线通讯,因而控制过程不受无线干扰,可靠性更高。
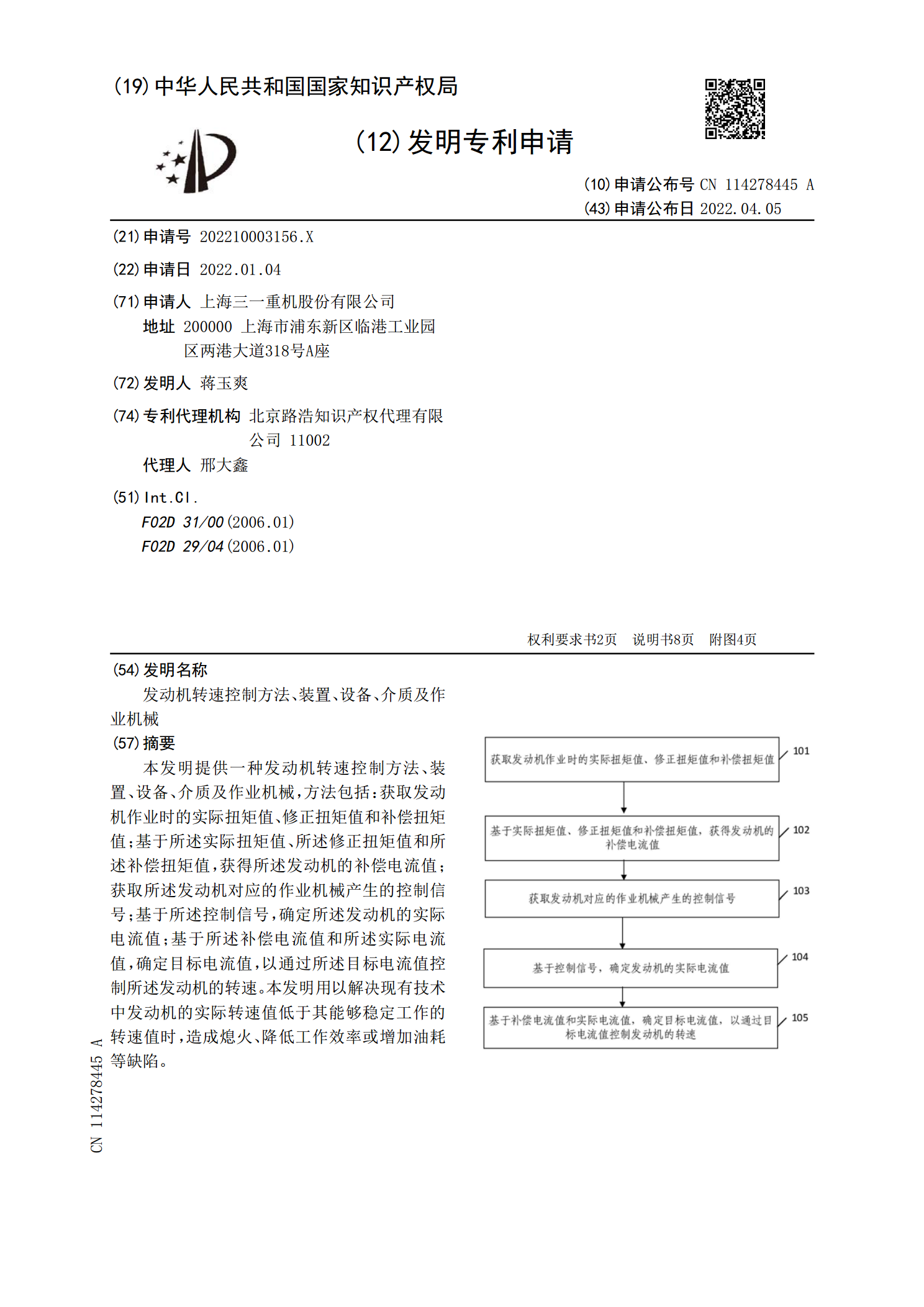
发动机转速控制方法、装置、设备、介质及作业机械.pdf
本发明提供一种发动机转速控制方法、装置、设备、介质及作业机械,方法包括:获取发动机作业时的实际扭矩值、修正扭矩值和补偿扭矩值;基于所述实际扭矩值、所述修正扭矩值和所述补偿扭矩值,获得所述发动机的补偿电流值;获取所述发动机对应的作业机械产生的控制信号;基于所述控制信号,确定所述发动机的实际电流值;基于所述补偿电流值和所述实际电流值,确定目标电流值,以通过所述目标电流值控制所述发动机的转速。本发明用以解决现有技术中发动机的实际转速值低于其能够稳定工作的转速值时,造成熄火、降低工作效率或增加油耗等缺陷。

一种作业控制方法、装置、作业设备及存储介质.pdf
本发明实施例公开了一种作业控制方法、装置、作业设备及存储介质。作业设备在任一目标作业位置处,自动控制机械臂移动至预估位置,在预估位置处,对机械臂进行定位以动确定机械臂的调整参数,基于调整参数,调整机械臂的执行末端正对当前的目标作业位置对应的当前的目标作业点,并控制执行末端在当前的目标作业点执行作业,作业设备在执行作业的过程中,可以自动调整执行末端的位姿,达到自动定位执行末端的位置的目的,以提高定位精度,无需全站仪辅助定位,降低硬件成本并满足作业精度的需求,并且,作业设备在执行作业的作业环境中可以灵活移动以
机械臂控制方法、装置、控制设备及存储介质.pdf
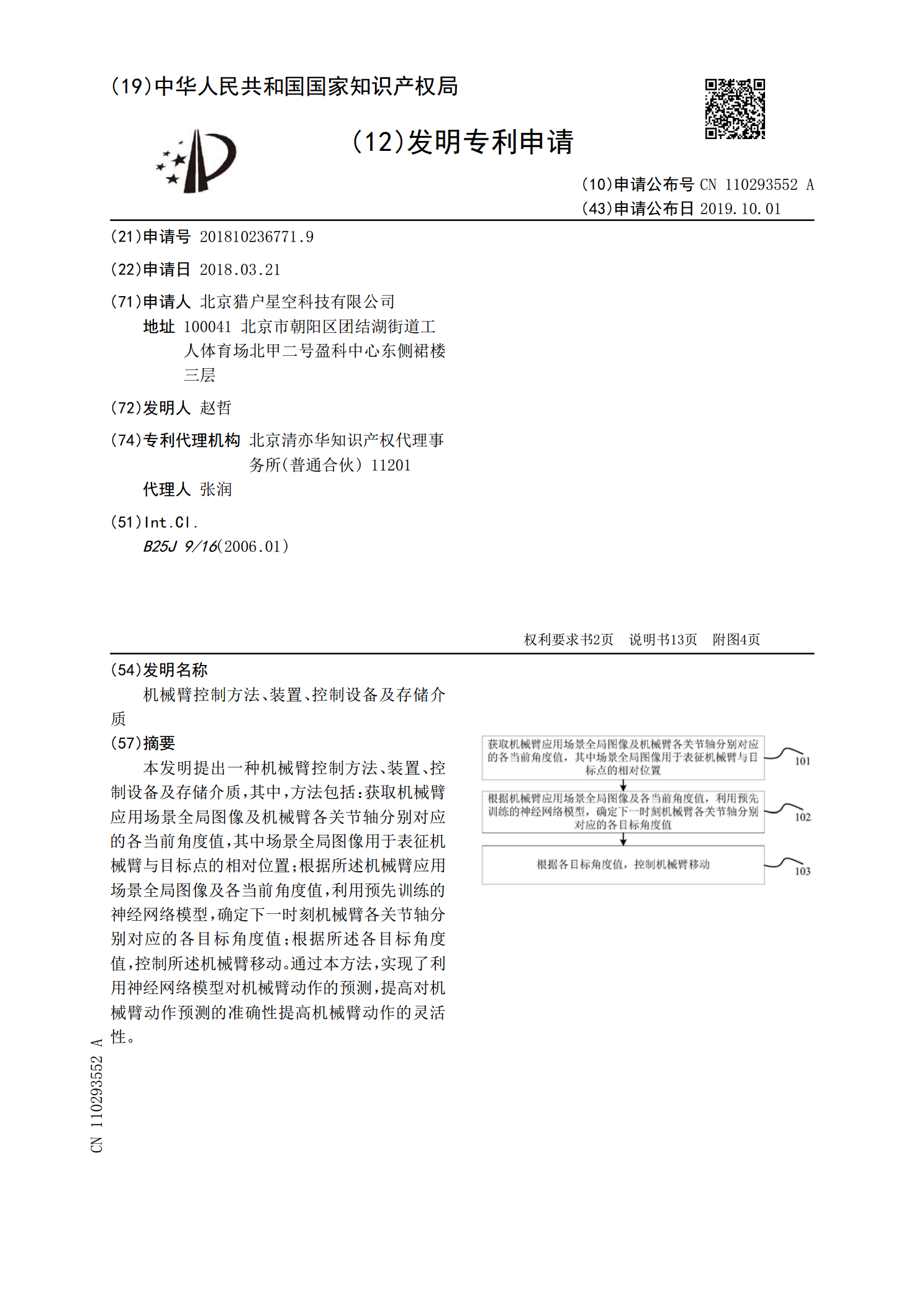
本发明提出一种机械臂控制方法、装置、控制设备及存储介质,其中,方法包括:获取机械臂应用场景全局图像及机械臂各关节轴分别对应的各当前角度值,其中场景全局图像用于表征机械臂与目标点的相对位置;根据所述机械臂应用场景全局图像及各当前角度值,利用预先训练的神经网络模型,确定下一时刻机械臂各关节轴分别对应的各目标角度值;根据所述各目标角度值,控制所述机械臂移动。通过本方法,实现了利用神经网络模型对机械臂动作的预测,提高对机械臂动作预测的准确性提高机械臂动作的灵活性。
文本识别方法、装置、设备、存储介质及作业机械.pdf
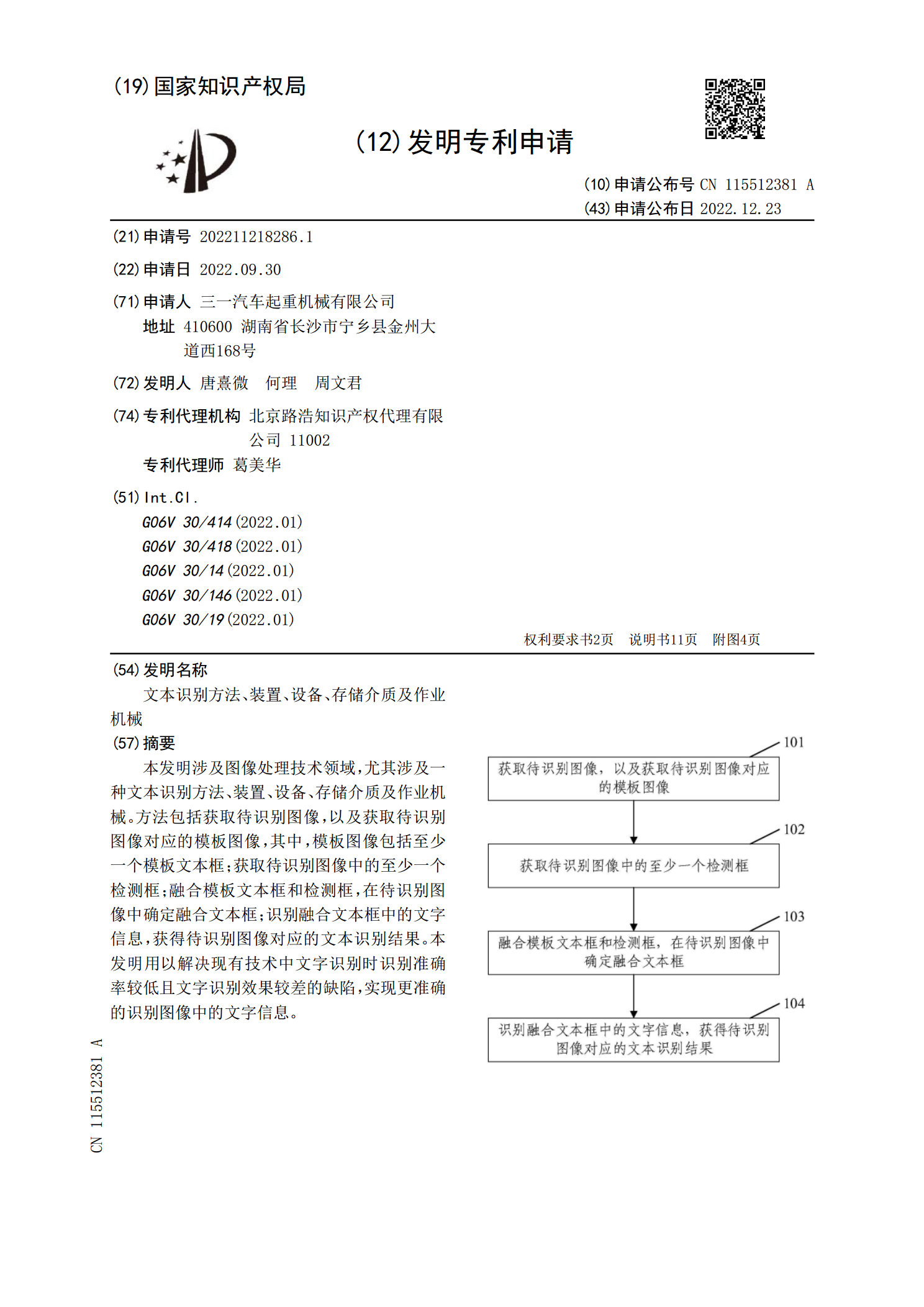
本发明涉及图像处理技术领域,尤其涉及一种文本识别方法、装置、设备、存储介质及作业机械。方法包括获取待识别图像,以及获取待识别图像对应的模板图像,其中,模板图像包括至少一个模板文本框;获取待识别图像中的至少一个检测框;融合模板文本框和检测框,在待识别图像中确定融合文本框;识别融合文本框中的文字信息,获得待识别图像对应的文本识别结果。本发明用以解决现有技术中文字识别时识别准确率较低且文字识别效果较差的缺陷,实现更准确的识别图像中的文字信息。