
一种面向软件定义卫星的成像系统及成像方法.pdf

念珊****写意

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种面向软件定义卫星的成像系统及成像方法.pdf
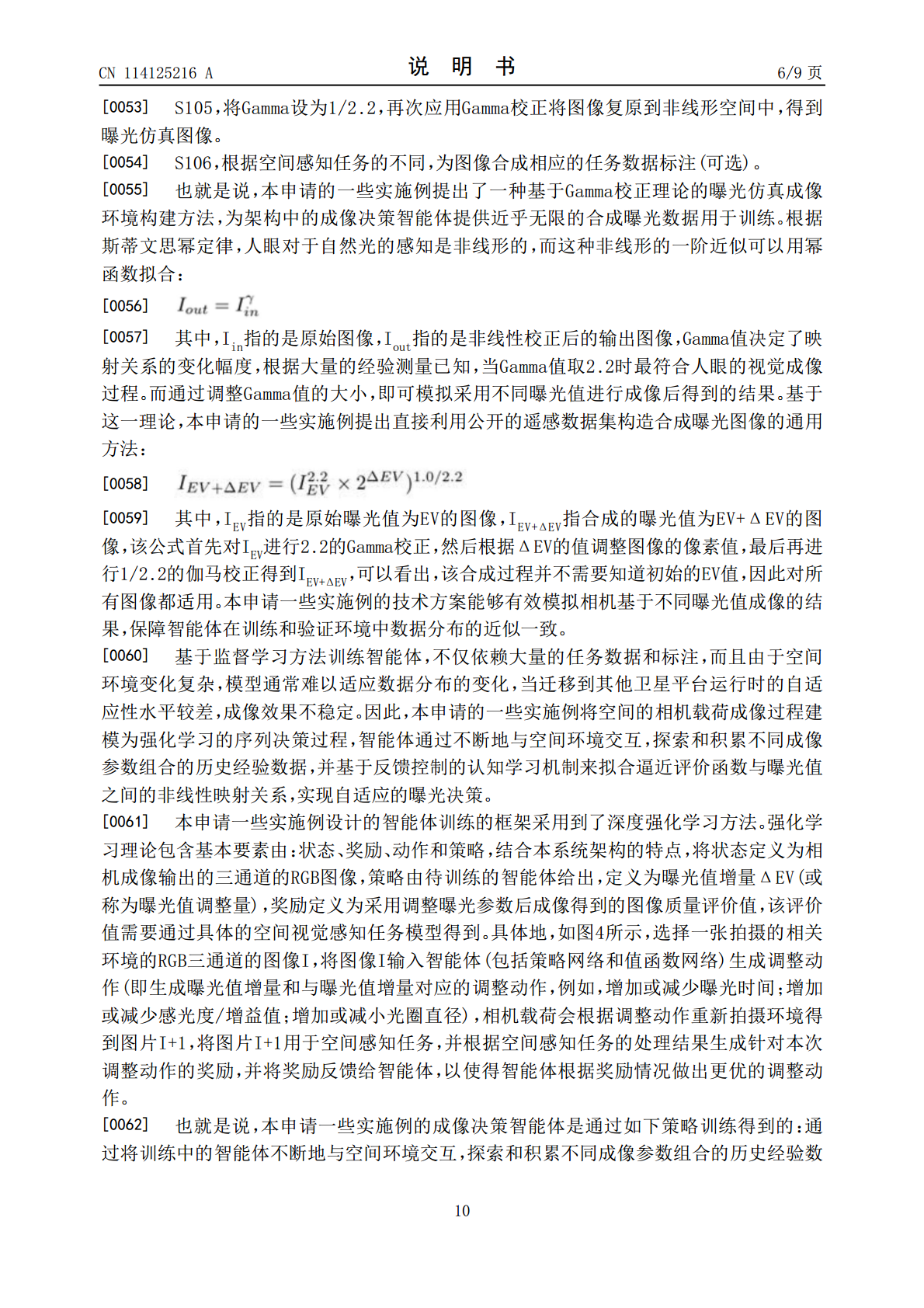
本申请实施例提供一种面向软件定义卫星的成像系统及成像方法,所述自适应曝光成像系统包括:相机载荷,被配置为:根据初始化成像参数获取RGB三通道图像;以及根据曝光值增量确定目标成像参数值,并根据所述目标成像参数值生成新的RGB三通道图像,其中,所述的相机载荷包括镜头组件、感光器件以及图像处理器ISP;成像决策智能体,被配置为:接收所述RGB三通道图像;根据所述新的RGB三通道图像得到所述曝光值增量并提供给所述相机载荷;以及,确认达到设定的循环次数,向空间视觉处理任务提供所述RGB三通道图像。本申请的实施例使得
一种面向软件定义卫星的大数据系统及数据自动处理方法.pdf
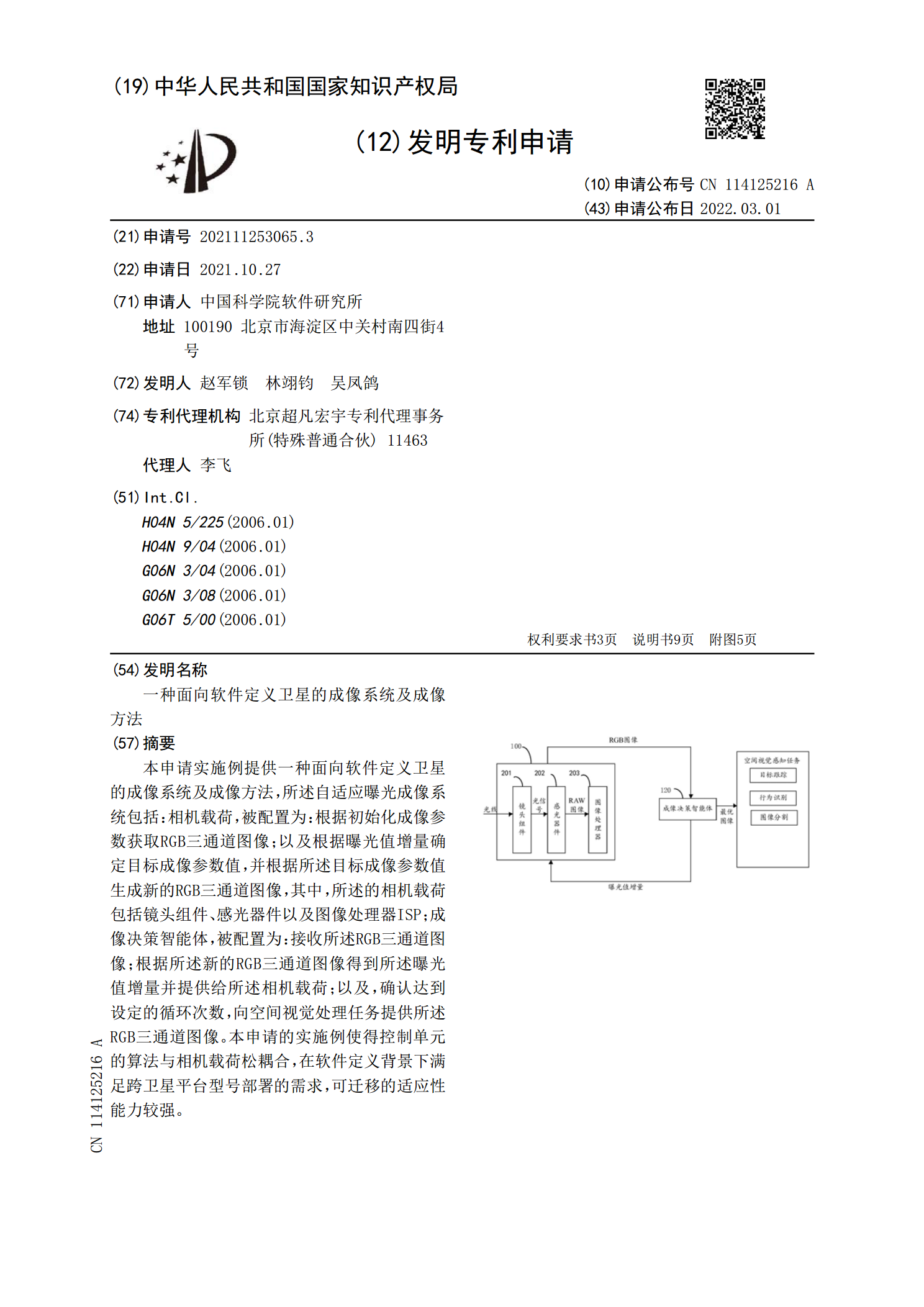
本申请实施例提供面向软件定义卫星的大数据系统以及服务处理方法,所述大数据系统包括:数据预处理及数据库管理模块,被配置为:将待录入的非结构化数据转换为标准数据结构对应的目标数据,并实现对结构化数据、所述目标数据和与所述目标数据对应的元数据的管理操作;结构化/非结构化数据库,被配置为存储所述结构化数据以及所述目标数据;多个数据处理服务模块;交互前端模块;命令/交互操作解析模块,被配置为解析所述命令或所述交互操作并根据解析结果确定目标请求服务类型或者执行与数据库访问相关的服务请求指令;系统运行控制模块,被配置为
基于主动成像卫星的变成像时长规划方法及系统.pdf
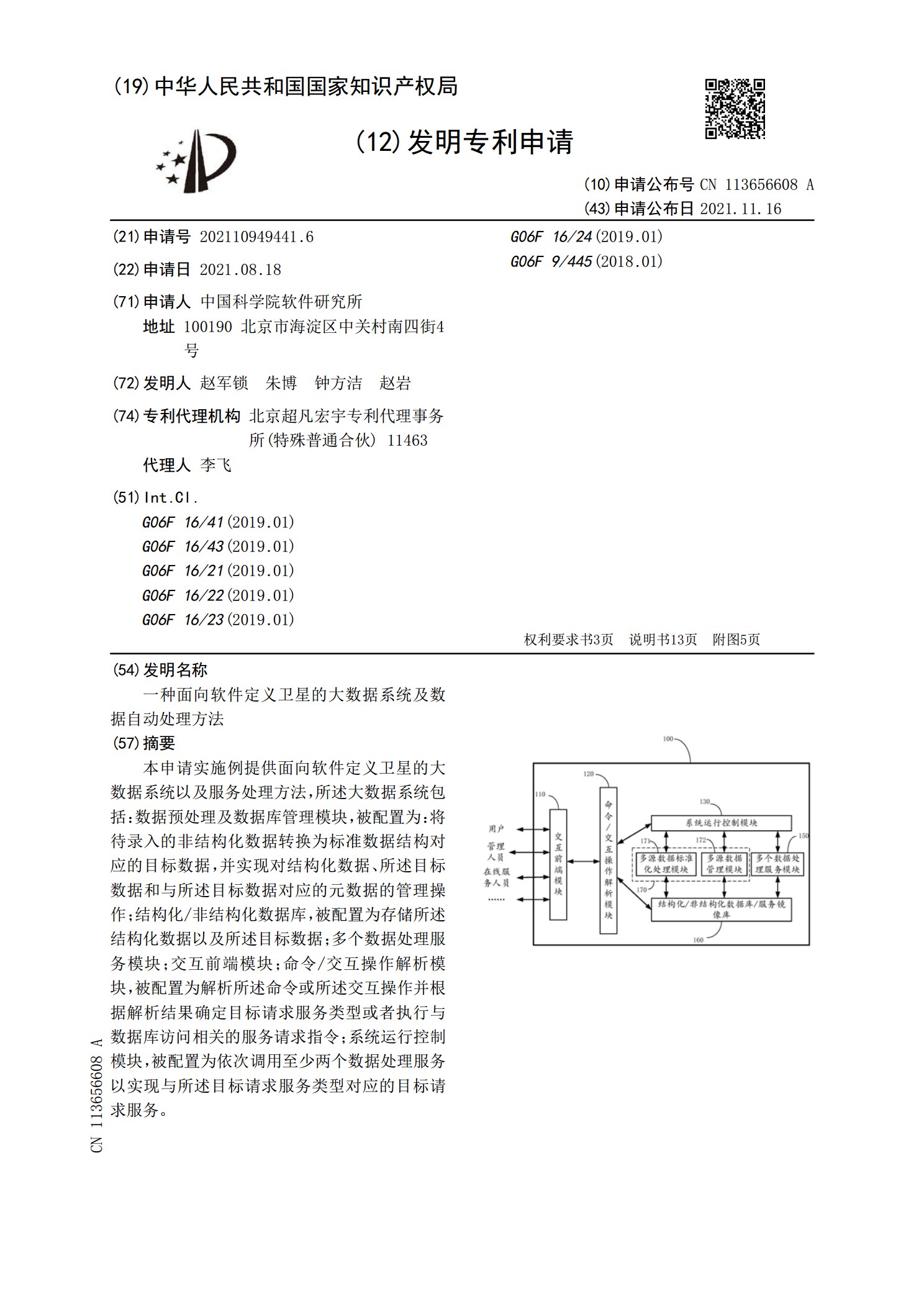
本发明提供了一种基于主动成像卫星的变成像时长规划方法及系统,方法包括以下步骤:步骤1:获取目标任务;步骤2:构建主动成像卫星的变成像时长规划模型;步骤3:对变成像时长规划模型进行求解;步骤4:得到规划方案并输出。本发明实现了卫星对差异性地面目标的动态、可变成像时长的观测,能够获取高优先级地面目标的连续一段时间内的遥感信息,同时保证其他低优先级地面目标的观测,最大化挖掘了敏捷卫星的强大遥感信息获取能力。而且保证了成像方案的能源消耗始终处于最小化。

一种面向区域目标的敏捷成像卫星单轨调度方法.docx
一种面向区域目标的敏捷成像卫星单轨调度方法标题:面向区域目标的敏捷成像卫星单轨调度方法摘要:敏捷成像卫星单轨调度方法是指通过有效的算法和优化策略,对具备敏捷机动能力的卫星进行单轨任务调度,以实现对区域目标的高效成像和监测。本文综述了当前敏捷成像卫星调度方法的研究现状,分析了现有方法存在的问题和挑战,并提出了一种基于优化算法的面向区域目标的敏捷成像卫星单轨调度方法。该方法综合考虑了卫星资源约束、任务优先级、成像质量和适航时间窗等因素,通过优化算法和划分策略对敏捷成像卫星进行灵活调度,以最大化任务执行效率和观

一种成像系统、方法及超声成像系统.pdf
本发明提供一种成像系统、方法及超声成像系统,其中成像系统包括:激光发射装置、激光检测装置和超声设备;激光检测装置,用于检测从激光发射装置发射的激光以获得激光检测信号;超声设备包括:超声探头、发射/接收电路和处理器;发射/接收电路用于在成像系统处于第一工作状态下时,控制超声探头接收被激光照射的受测机体组织产生的光声信号;处理器,用于在成像系统处于第一工作状态下时,生成控制信号,向激光发射装置发送控制信号,以使激光发射装置在控制信号作用下工作,同时处理器还用于根据激光检测信号对光声信号进行处理,以去除超声探头