
一种基于多源信息融合的非合作航天器相对位姿测量方法.pdf

安双****文章


1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多源信息融合的非合作航天器相对位姿测量方法.pdf
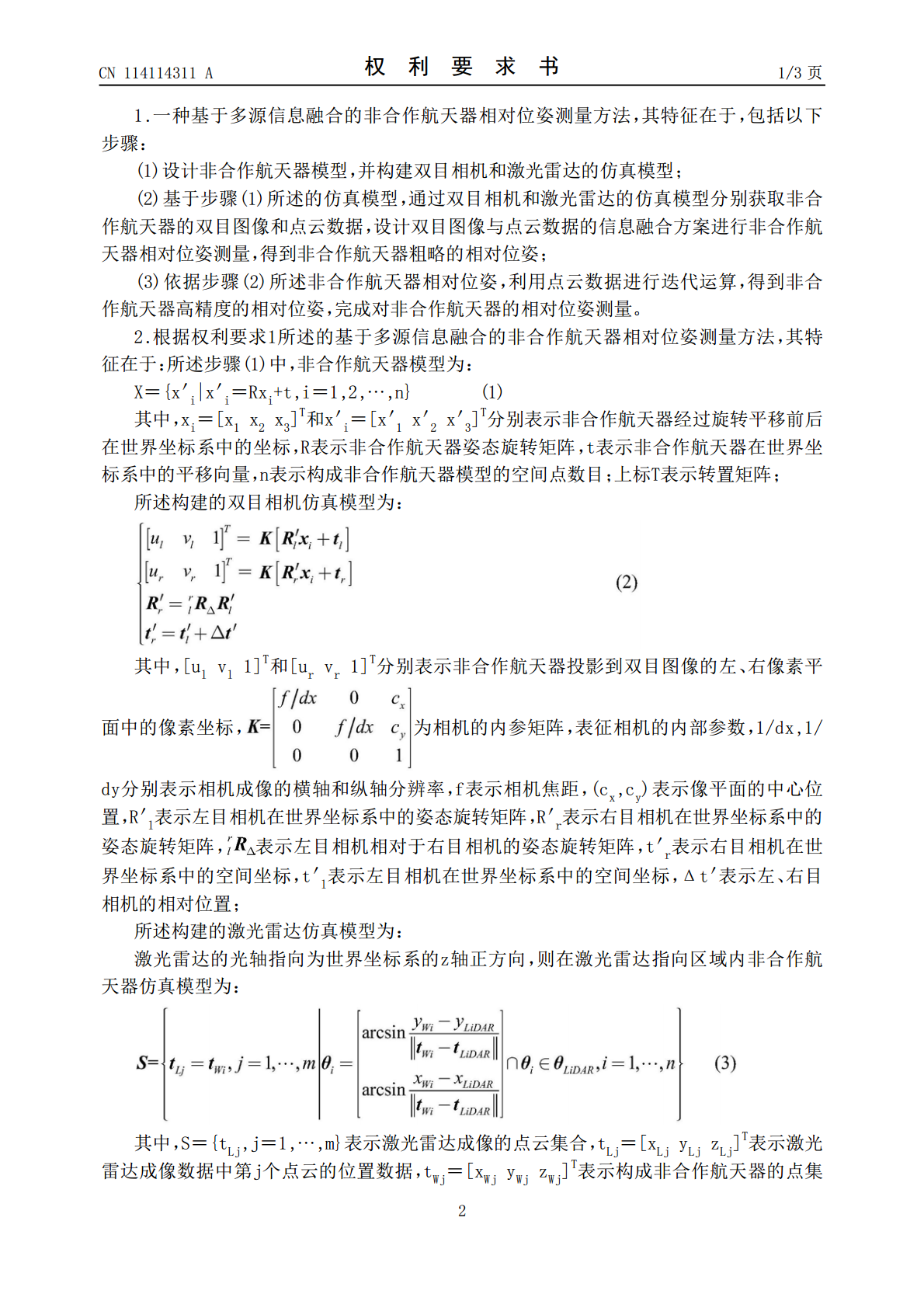
本发明涉及一种基于多源信息融合的非合作航天器相对位姿测量方法,其步骤为:首先,设计非合作航天器模型,并构建双目相机和激光雷达的仿真模型;然后,考虑双目相机可以获取非合作航天器的全部信息但恢复深度信息的准确性受双目相机的配置标定影响,而激光雷达成像可以直接获取非合作航天器精确的深度信息但激光雷达成像点云稀疏,结合两类传感器的优势,设计传感器数据融合结构进行非合作航天器相对位姿测量;最后,基于测量的目标相对位姿,利用激光雷达数据进行迭代运算提高非合作航天器相对位姿测量精度。本发明通过基于双目相机与激光雷达数据

基于多源信息融合的非合作航天器相对位姿测量.docx
基于多源信息融合的非合作航天器相对位姿测量基于多源信息融合的非合作航天器相对位姿测量摘要:随着太空探索的不断深入和航天技术的快速发展,对于非合作航天器的相对位姿测量的需求日益迫切。在传统的相对位姿测量方法中,通常只能使用单一传感器,且存在信息不完整、误差大等问题。为了克服这些挑战,本文提出了一种基于多源信息融合的非合作航天器相对位姿测量方法。通过整合多种传感器数据和信息,可以提高相对位姿测量的精度和可靠性。本文还对该方法进行了实验验证,结果表明本文所提出的方法具有较高的准确性和可行性。导言:非合作航天器相
一种基于深度学习的非合作目标相对位姿测量方法、系统.pdf
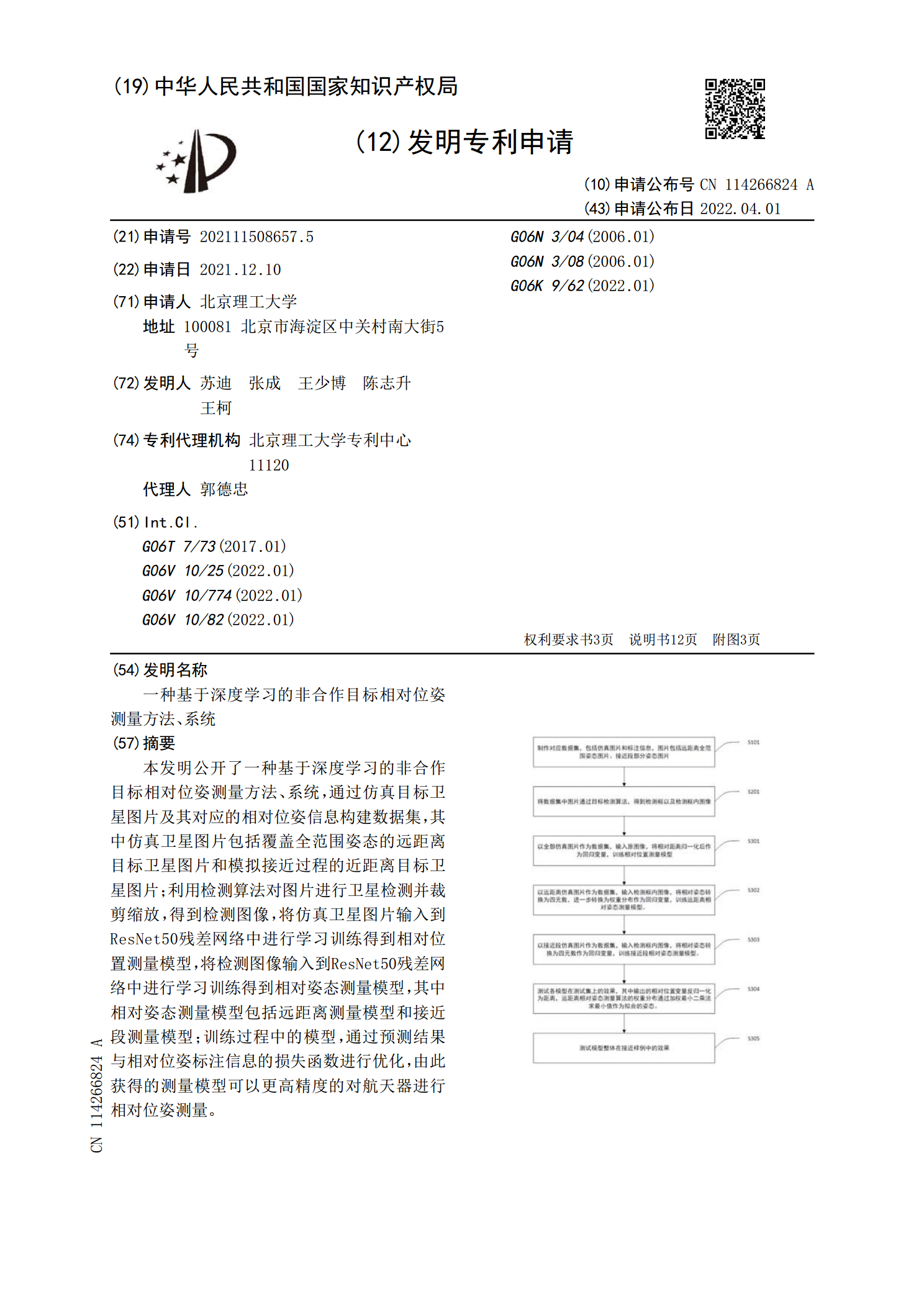
本发明公开了一种基于深度学习的非合作目标相对位姿测量方法、系统,通过仿真目标卫星图片及其对应的相对位姿信息构建数据集,其中仿真卫星图片包括覆盖全范围姿态的远距离目标卫星图片和模拟接近过程的近距离目标卫星图片;利用检测算法对图片进行卫星检测并裁剪缩放,得到检测图像,将仿真卫星图片输入到ResNet50残差网络中进行学习训练得到相对位置测量模型,将检测图像输入到ResNet50残差网络中进行学习训练得到相对姿态测量模型,其中相对姿态测量模型包括远距离测量模型和接近段测量模型;训练过程中的模型,通过预测结果与相

非合作航天器位姿在轨测量方法的研究.docx
非合作航天器位姿在轨测量方法的研究随着航天技术的不断发展和进步,航天器的测量也变得非常重要。其中一个关键的问题是如何在轨道上测量非合作航天器的位姿。本文将探讨一些测量非合作航天器位姿的方法。1.光学测量方法光学测量方法是测量非合作航天器位姿的最常用和最有效的方法之一。该方法使用相机或望远镜来捕捉目标航天器的图像,并根据图像中的几何特征来计算其位姿。这种方法的优点在于可以通过光学测量技术进行高精度的测量,而且可以在航天器之间建立联系,从而实现精确的姿态确定。2.无线电测量方法无线电测量方法也是测量非合作航天

一种基于TOF相机的空间合作目标相对位姿测量方法.docx
一种基于TOF相机的空间合作目标相对位姿测量方法标题:基于TOF相机的空间合作目标相对位姿测量方法摘要:空间合作是现代科技应用中的一个重要领域,其中实现目标相对位姿测量是一个关键问题。本文提出了一种基于TOF(Time-of-Flight)相机的空间合作目标相对位姿测量方法。该方法利用TOF相机获取目标表面的深度图像,并从中提取表面特征,然后使用特征匹配的方法计算目标之间的相对位姿。实验结果表明,该方法能够精确地测量目标之间的相对位姿。关键词:TOF相机、空间合作、目标相对位姿、深度图像、特征匹配引言:空