
二维有源雷达的机载气象雷达视轴调节方法.pdf

书生****22

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
二维有源雷达的机载气象雷达视轴调节方法.pdf
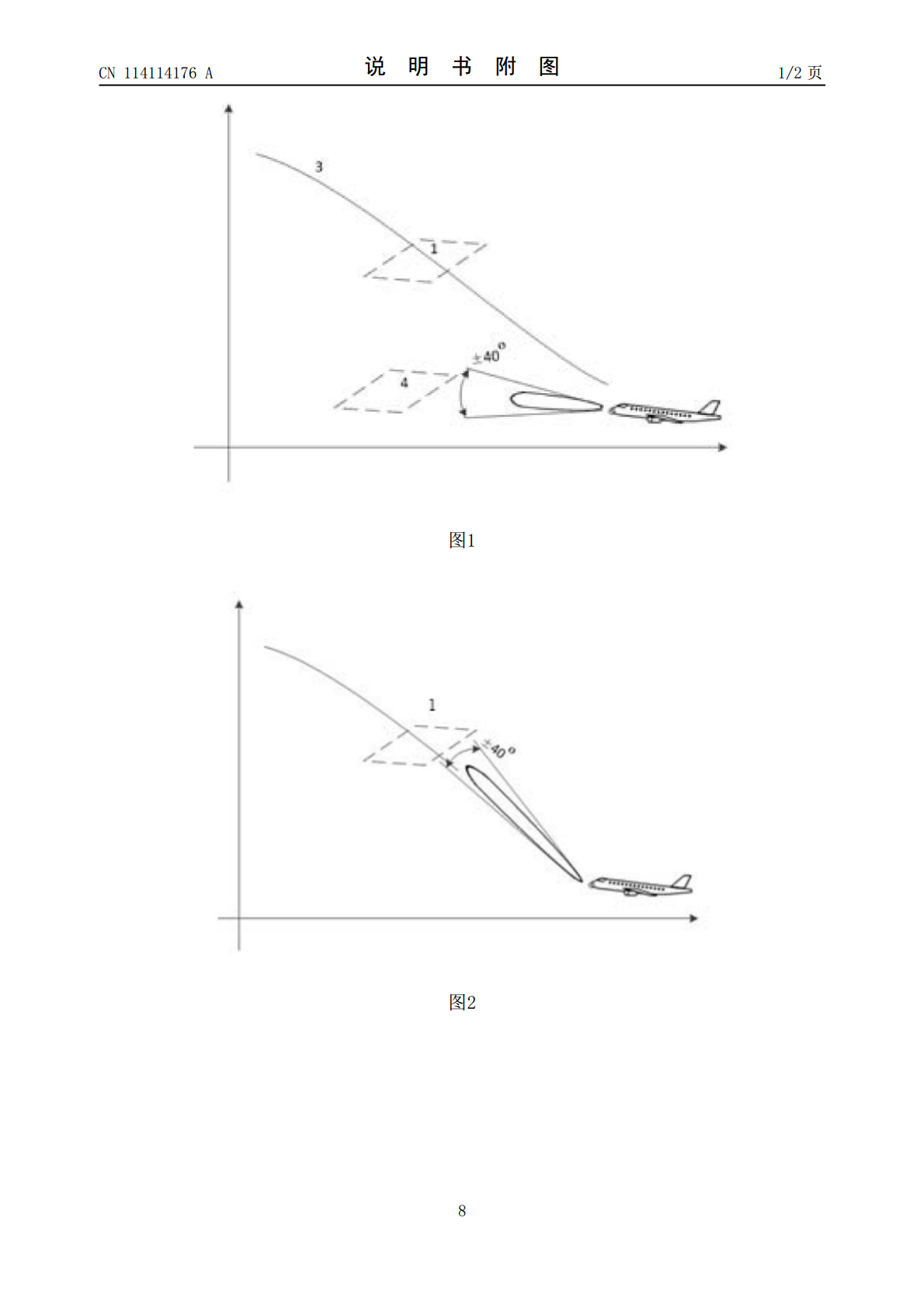
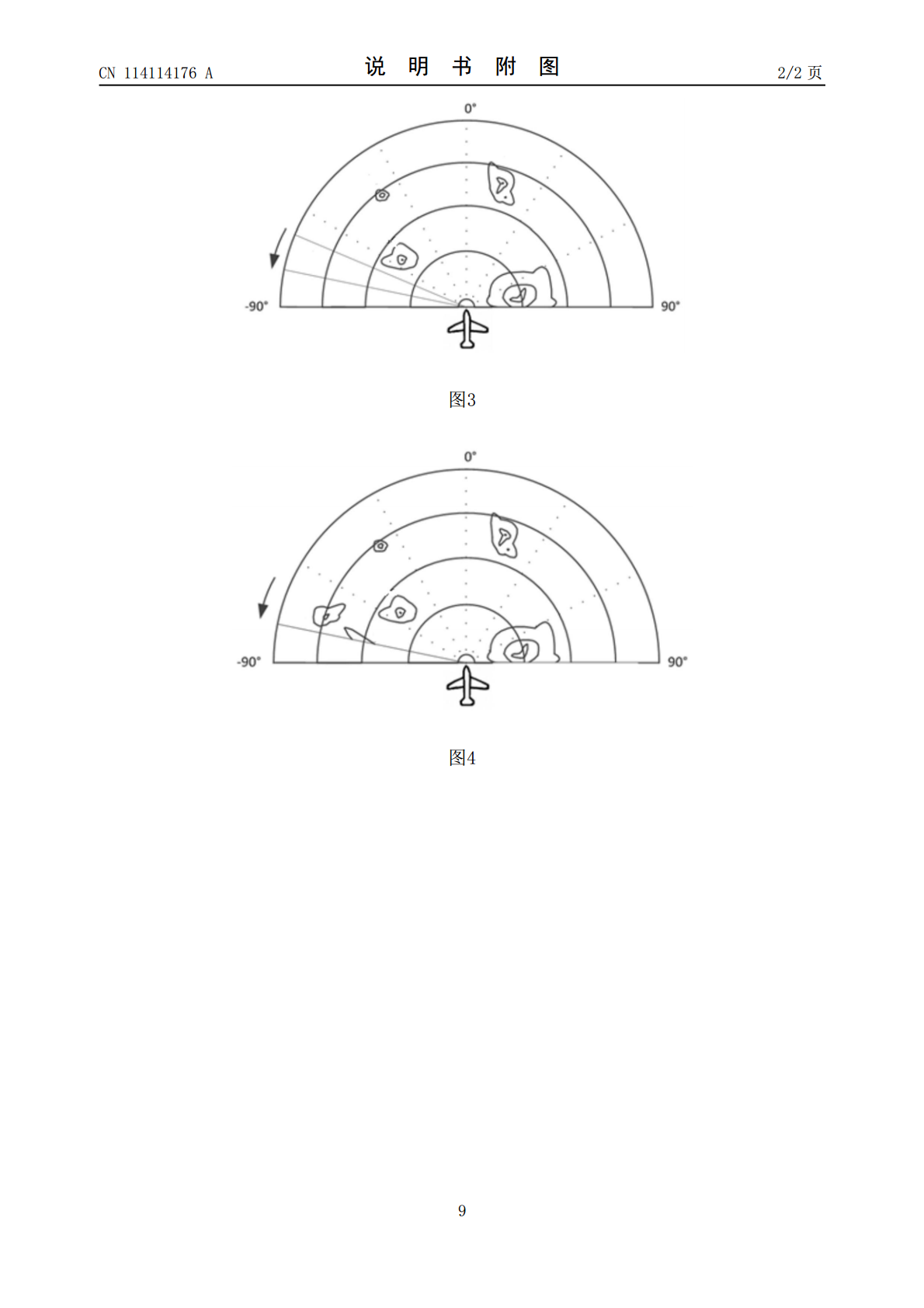
本发明提供了一种二维有源雷达的机载气象雷达视轴调节方法,包括以下步骤:步骤一、根据载机在惯性系下运动姿态角的角速率计算出载机到达预定空域所需的天线角度的修正量;步骤二、将修正量经过空域稳定算法的坐标变换得到载机坐标系下控制天线的方位角和俯仰角坐标。在载机进入含有危险气象环境的空域之前,即提前进行探测,为飞行员进行规避提供依据,所探测的空域实际上应为预期飞机将要进入的空域,即优先关注预期航线上的危险气象目标。通过该项技术,可使机载雷达的探测视轴更加贴近飞机预期规划的飞行空域,为飞行员提供更准确的气象信息。
一种二维有源机载气象雷达自动测试系统.pdf
本发明提供了一种二维有源机载气象雷达自动测试系统,其所述测试系统包括:航电仿真器、自动测试组件、数据处理组件、数据记录组件以及控制组件,其中数据处理组件包括WXR数据库集群、数据库管理单元以及综显。本发明所提供的二维有源机载气象雷达自动测试系统,通过建立各种雷达数据库及目标模型数据库,对数据库进行管理,进行场景编辑,能够更好解决雷达研制生产维修过程中,测试场景复杂,人工操作繁琐、测试效率低及操作复杂不易复现及重复测试场景的问题;并且同时解决了现有测试设备的价格昂贵、可测试项单一的问题。
机载有源相控阵气象雷达空域扩展探测显示方法.pdf
本发明提供一种机载有源相控阵气象雷达空域扩展探测显示方法,包括以下步骤:步骤一、获取T0时刻载机前方空间立体多层扫描反射率数据;步骤二、计算T0时刻空间气象模型反射率数据;步骤三、计算T1时刻载机相对于T0的位置变化信息;步骤四、计算T1时刻载机雷达扩展空域部分气象回波数据;步骤五、根据步骤四的结果获取T1时刻扩展后的空域探测数据并于雷达画面进行显示。通过把机载立体扫描数据插值存储为三维网格数据,得到空域气象模型,当载机在空域气象模型中扫描时,即可利用载机雷达和气象模型相对位置关系,计算出更大扫描范围的气
机载气象雷达的气象与地杂波的鉴别方法.pdf
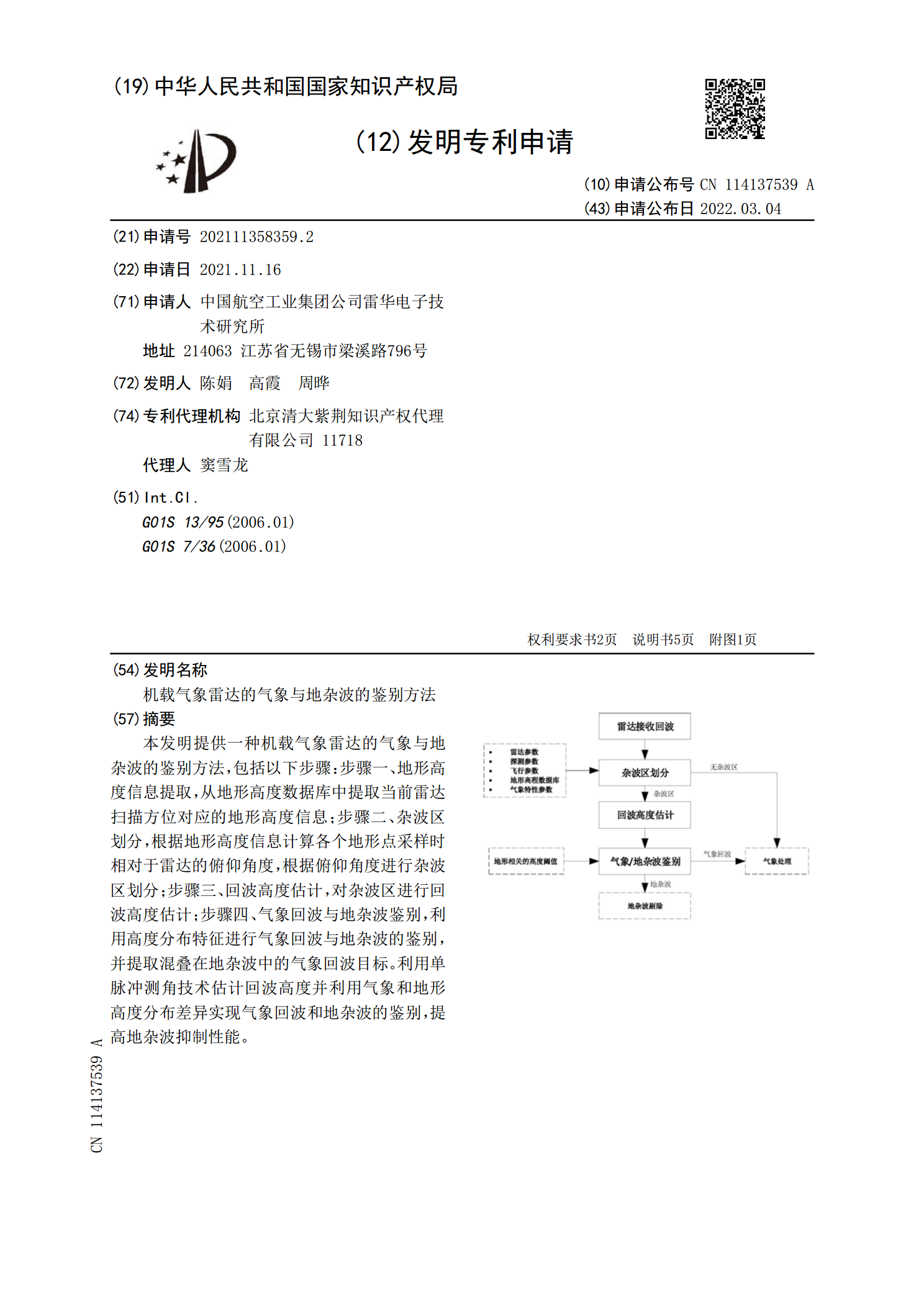
本发明提供一种机载气象雷达的气象与地杂波的鉴别方法,包括以下步骤:步骤一、地形高度信息提取,从地形高度数据库中提取当前雷达扫描方位对应的地形高度信息;步骤二、杂波区划分,根据地形高度信息计算各个地形点采样时相对于雷达的俯仰角度,根据俯仰角度进行杂波区划分;步骤三、回波高度估计,对杂波区进行回波高度估计;步骤四、气象回波与地杂波鉴别,利用高度分布特征进行气象回波与地杂波的鉴别,并提取混叠在地杂波中的气象回波目标。利用单脉冲测角技术估计回波高度并利用气象和地形高度分布差异实现气象回波和地杂波的鉴别,提高地杂波
机载气象雷达探测波形设计与显示方法.pdf
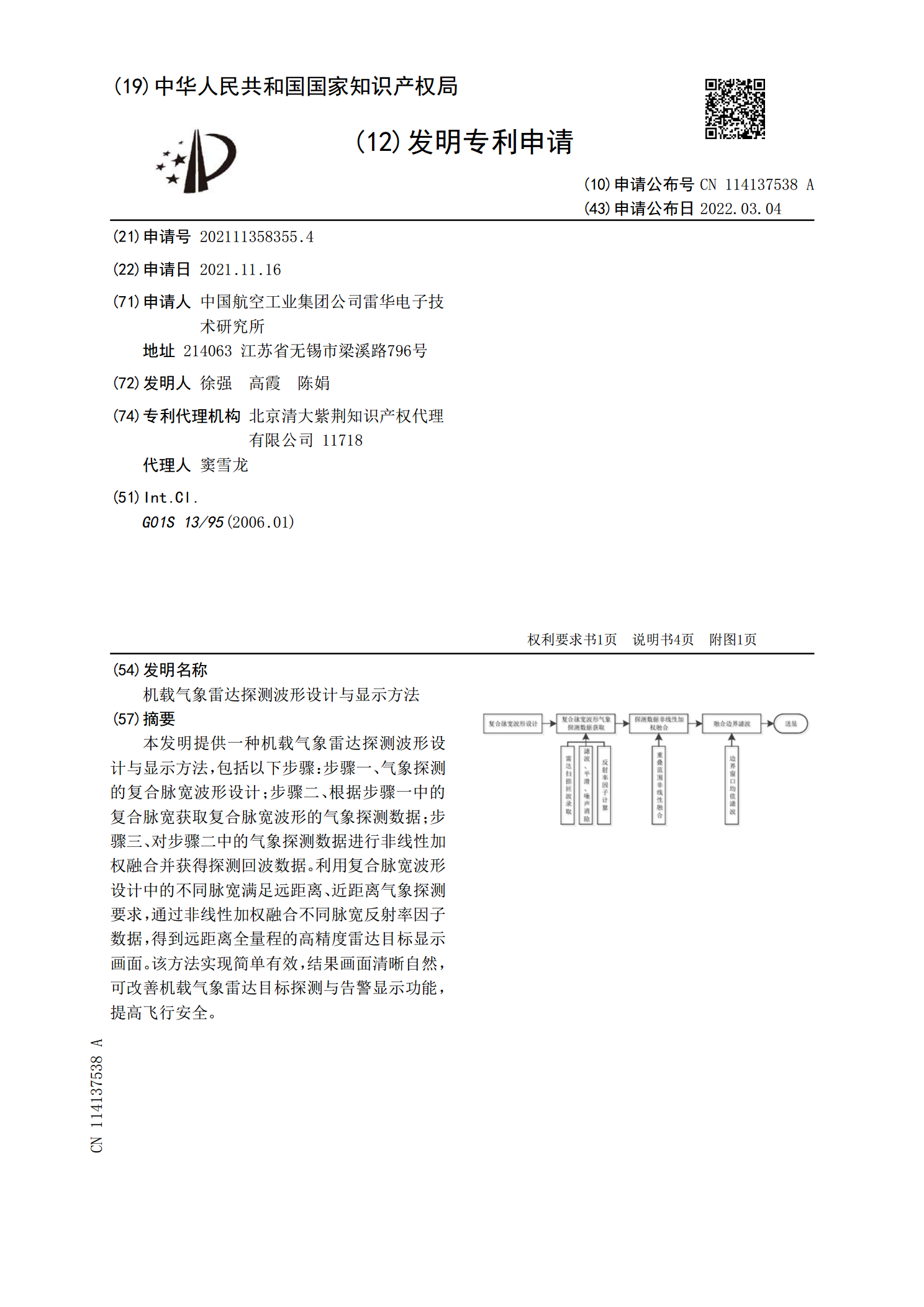
本发明提供一种机载气象雷达探测波形设计与显示方法,包括以下步骤:步骤一、气象探测的复合脉宽波形设计;步骤二、根据步骤一中的复合脉宽获取复合脉宽波形的气象探测数据;步骤三、对步骤二中的气象探测数据进行非线性加权融合并获得探测回波数据。利用复合脉宽波形设计中的不同脉宽满足远距离、近距离气象探测要求,通过非线性加权融合不同脉宽反射率因子数据,得到远距离全量程的高精度雷达目标显示画面。该方法实现简单有效,结果画面清晰自然,可改善机载气象雷达目标探测与告警显示功能,提高飞行安全。