
一种基于多源数据融合的车辆检测方法及检测装置.pdf

宏硕****mo

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多源数据融合的车辆检测方法及检测装置.pdf
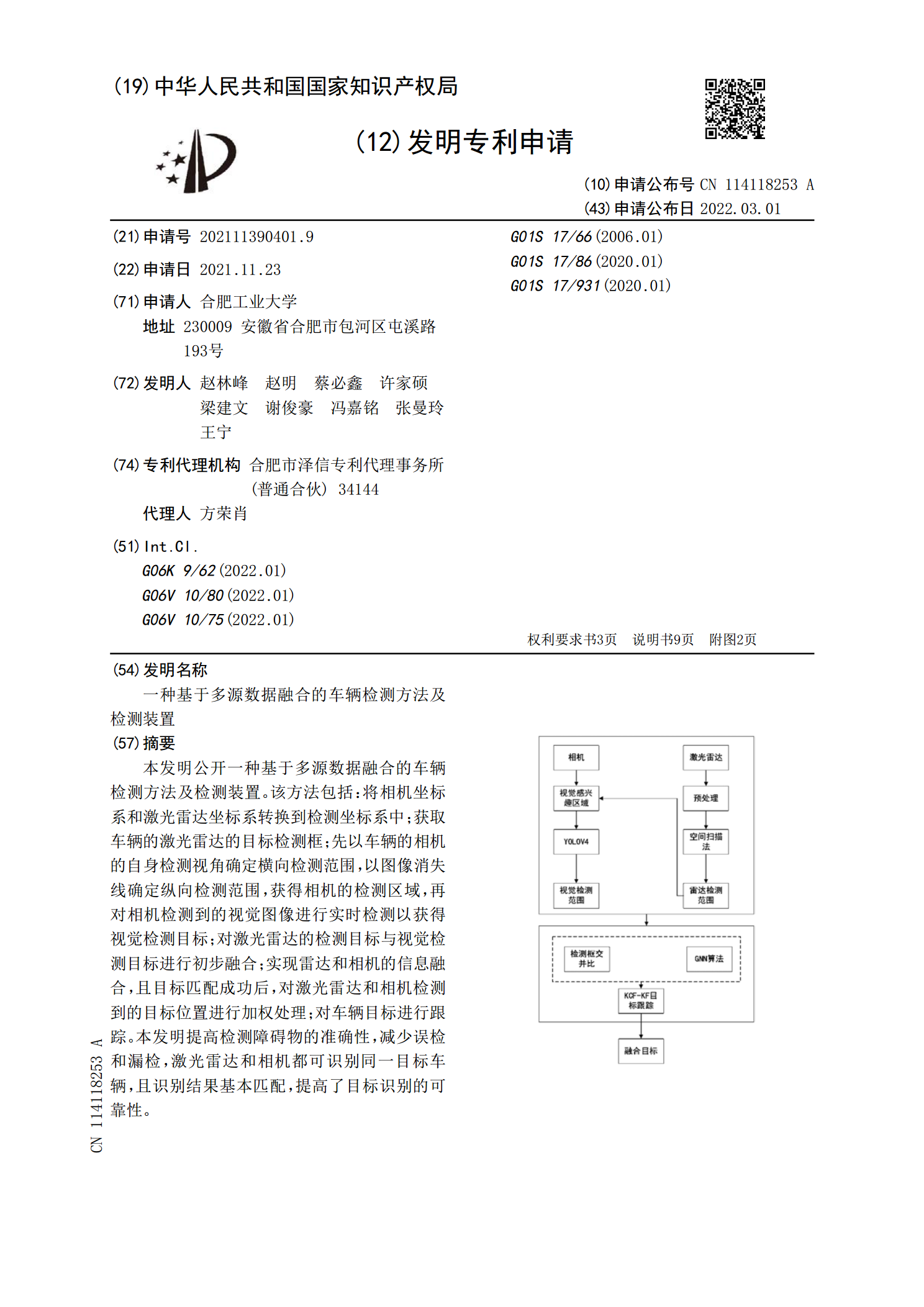
本发明公开一种基于多源数据融合的车辆检测方法及检测装置。该方法包括:将相机坐标系和激光雷达坐标系转换到检测坐标系中;获取车辆的激光雷达的目标检测框;先以车辆的相机的自身检测视角确定横向检测范围,以图像消失线确定纵向检测范围,获得相机的检测区域,再对相机检测到的视觉图像进行实时检测以获得视觉检测目标;对激光雷达的检测目标与视觉检测目标进行初步融合;实现雷达和相机的信息融合,且目标匹配成功后,对激光雷达和相机检测到的目标位置进行加权处理;对车辆目标进行跟踪。本发明提高检测障碍物的准确性,减少误检和漏检,激光雷
基于深度学习的多源数据融合的轨道状态检测方法及装置.pdf
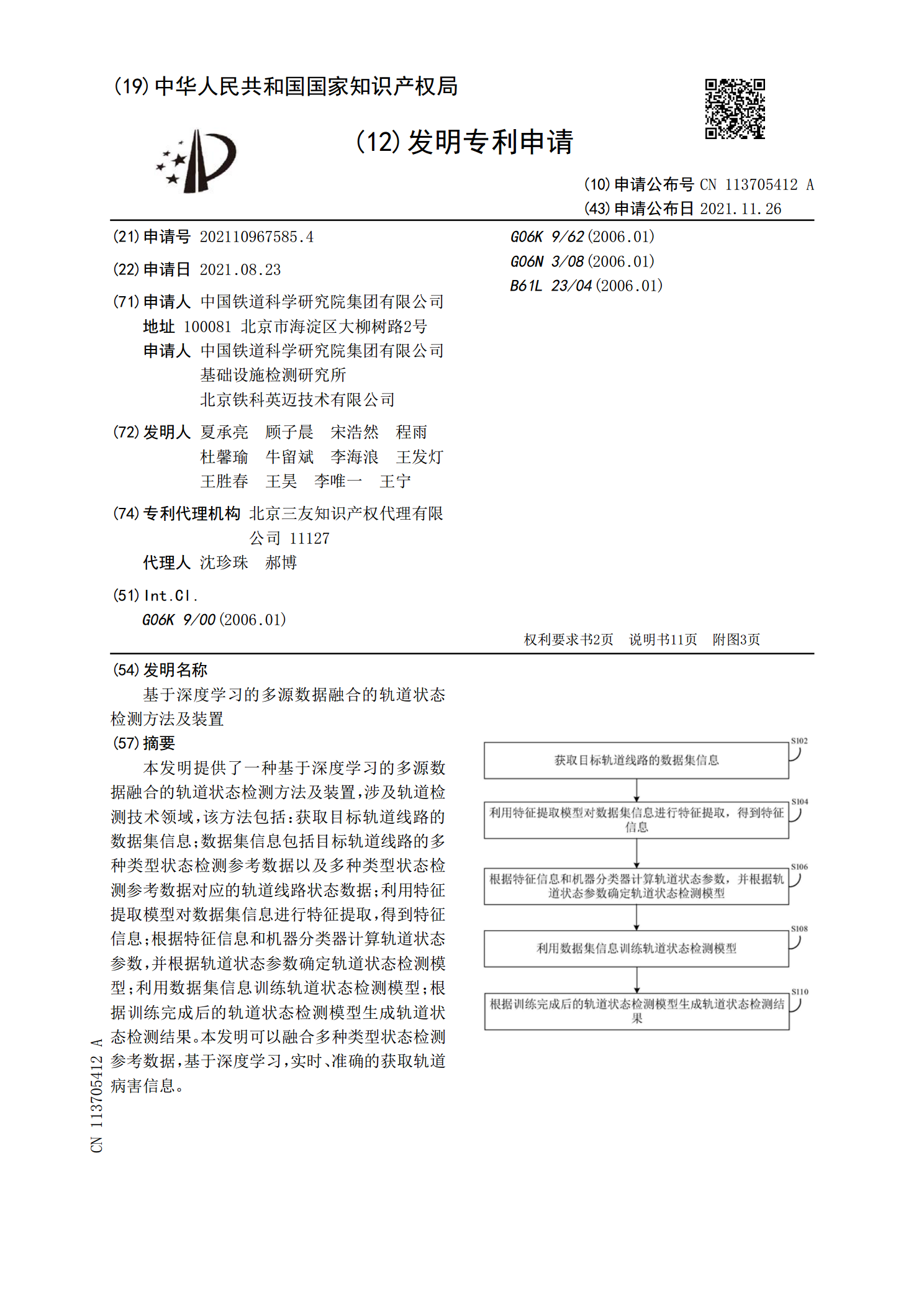
本发明提供了一种基于深度学习的多源数据融合的轨道状态检测方法及装置,涉及轨道检测技术领域,该方法包括:获取目标轨道线路的数据集信息;数据集信息包括目标轨道线路的多种类型状态检测参考数据以及多种类型状态检测参考数据对应的轨道线路状态数据;利用特征提取模型对数据集信息进行特征提取,得到特征信息;根据特征信息和机器分类器计算轨道状态参数,并根据轨道状态参数确定轨道状态检测模型;利用数据集信息训练轨道状态检测模型;根据训练完成后的轨道状态检测模型生成轨道状态检测结果。本发明可以融合多种类型状态检测参考数据,基于深

一种基于多源数据融合的黑广播检测方法及系统.pdf
本发明提供了一种基于多源数据融合的黑广播检测方法及系统,提取广播信号测量数据中的多个特征参数,按不同的信号时间段长度以极大值、极小值和平均值分别对特征参数进行统计和组合得到组合特征向量,将组合特征向量输入到预训练的黑广播检测网络,输出该广播信号的判断结果。本发明选取多重特征,并对每一个特征都再次进行多重统计分析,从而形成丰富的特征向量,在不显著增加提取难度的前提下,既能丰富特征向量,也能更好的反映“黑白”广播的原始本质;提出了基于所选特征的黑广播检测网络,简化了网络处理过程中的记忆过程,简化了网络结构,提
一种基于多源光谱数据融合的牛奶新鲜度检测方法.pdf
本发明公开了一种基于多源光谱数据融合的牛奶新鲜度检测方法,包括如下步骤:采集牛奶样品若干,将其分成校正集牛奶样品和测试集牛奶样品,并测定其酸度值、近红外光谱和拉曼光谱,并将预处理后的近红外光谱和拉曼光谱进行数据层融合,得到融合光谱;建立校正集牛奶样品的酸度值与校正集牛奶样品的融合光谱的定量模型;通过定量模型预测测试集牛奶样品的酸度值,并与测试集牛奶样品的酸度值比较;采集待测牛奶样品的近红外光谱和拉曼光谱,采用定量模型预测待测牛奶样品的酸度值。该基于多源光谱数据融合的牛奶新鲜度检测方法,安全可靠,快速准确,

基于多源数据融合的干道车辆运行轨迹重构的方法.pdf
本发明公开了一种基于多源数据融合的干道车辆运行轨迹重构的方法。其中,本方法旨在全面、准确地再现干道交通状态的时空分布和演变规律,从而提高交通状态参数估计和预测精度,提升信号控制效益。本发明基于三维冲击波的变分理论,首先采用定点检测器数据估计前向弧和后向弧斜率,建立初始的干道时空网络图;其次通过融合浮动车数据和信号配时数据估计排队传播曲线轮廓;最后在浮动车轨迹、排队边界和信号配时三个维度的约束下,基于最短路算法重构车辆完整运行轨迹。本发明解决了当前拥堵状态下车辆运行轨迹难以精确估计以及目前基于抽样轨迹数据研