
高温红热目标双目线激光视觉三维测量方法.pdf

是你****馨呀

1/7
2/7
3/7

4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高温红热目标双目线激光视觉三维测量方法.pdf
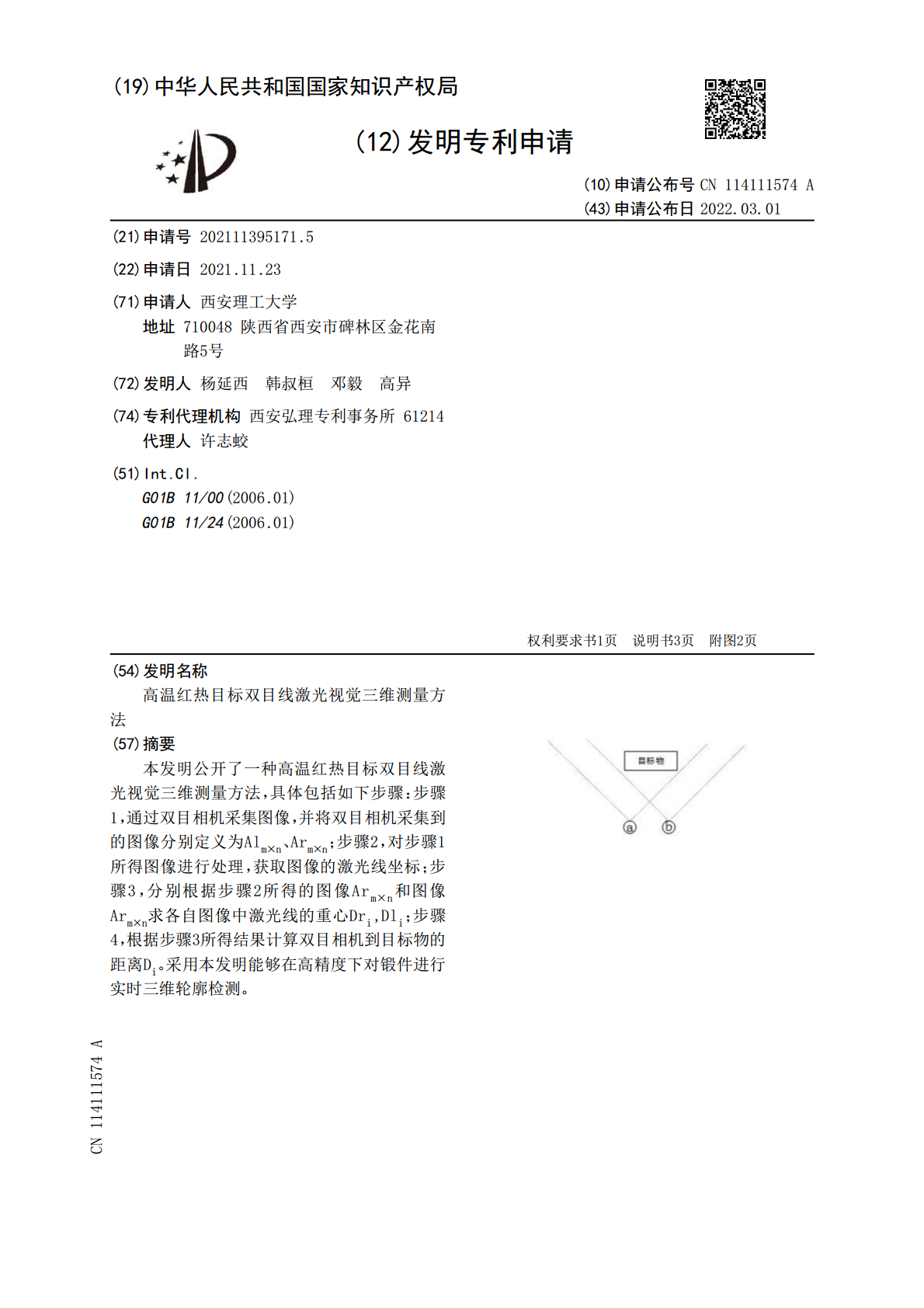
本发明公开了一种高温红热目标双目线激光视觉三维测量方法,具体包括如下步骤:步骤1,通过双目相机采集图像,并将双目相机采集到的图像分别定义为Al
一种基于线激光的旋转物体双目视觉三维测量方法.pdf
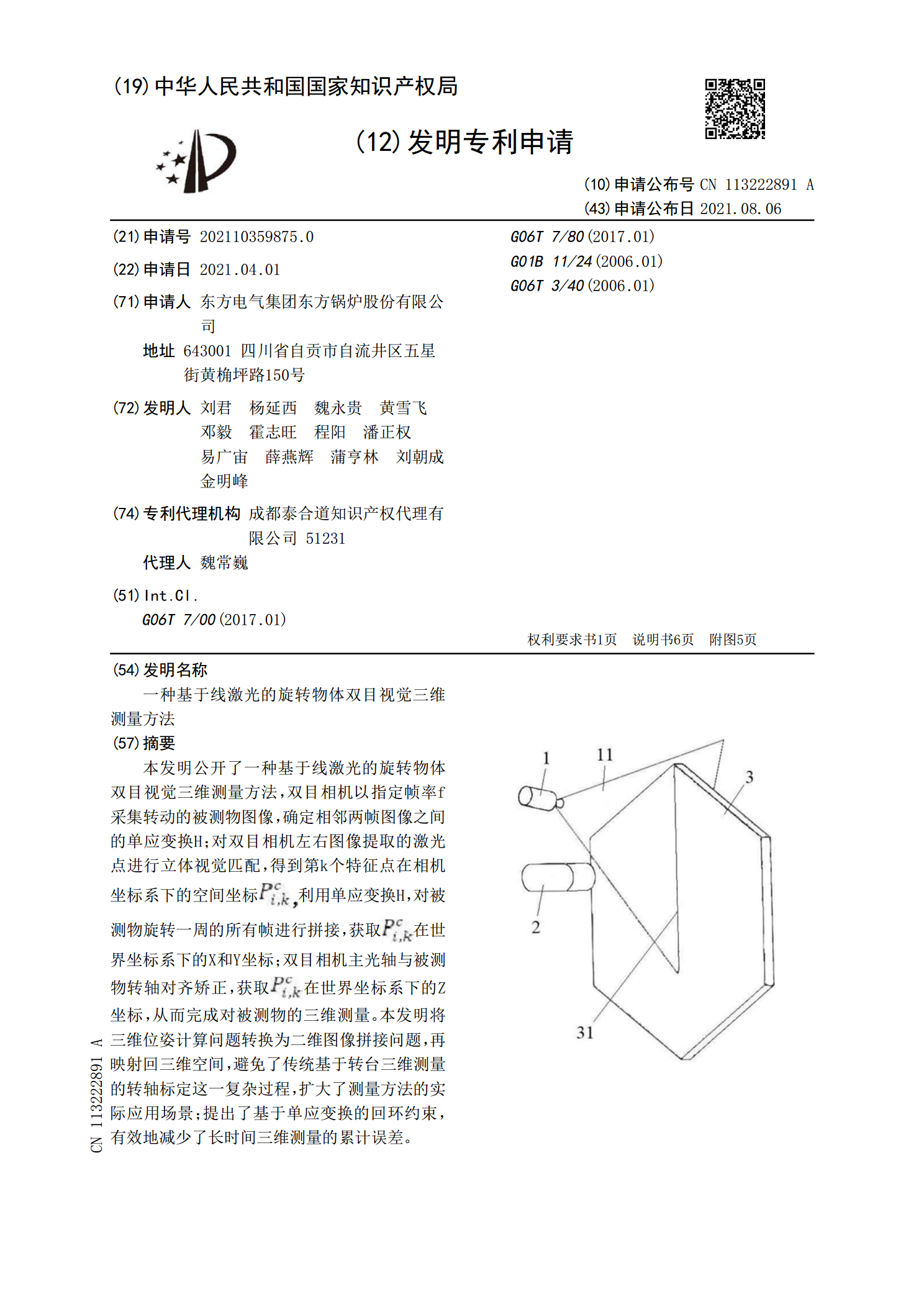
本发明公开了一种基于线激光的旋转物体双目视觉三维测量方法,双目相机以指定帧率f采集转动的被测物图像,确定相邻两帧图像之间的单应变换H;对双目相机左右图像提取的激光点进行立体视觉匹配,得到第k个特征点在相机坐标系下的空间坐标

高温红热目标视觉测量校正方法.pdf
本发明公开了一种高温红热目标视觉测量校正方法,具体包括如下步骤:步骤1,通过双目相机采集标定板,得到图像Y,对图像Y进行特征点提取,对提取的所有特征点进行去畸变处理,得到图像Y

一种单双目视觉结合的实时激光三维测量方法.docx
一种单双目视觉结合的实时激光三维测量方法标题:基于单双目视觉结合的实时激光三维测量方法摘要:实时三维测量技术在工业、医疗和自动驾驶等领域具有重要应用价值。本文提出了一种基于单双目视觉结合的实时激光三维测量方法,通过将激光测距技术与计算机视觉相结合,可以实现快速高精度的三维测量。本文首先介绍了激光测距技术和计算机视觉技术的基本原理,然后详细介绍了该方法的实现步骤和关键技术,最后进行了实验验证,结果表明该方法在实时性和测量精度方面达到了预期的效果。关键词:单双目视觉,激光测距,三维测量,实时性,精度1.引言三

基于线激光旋转扫描的三维视觉测量方法研究.docx
基于线激光旋转扫描的三维视觉测量方法研究基于线激光旋转扫描的三维视觉测量方法研究摘要:随着工业制造和自动化技术的不断发展,对于三维物体形状和尺寸的精确测量需求越来越大。本文基于线激光旋转扫描技术,研究了一种适用于三维视觉测量的方法。通过对线激光旋转扫描原理的分析和实验验证,验证了该方法的可行性和准确性。实验结果表明,该方法可以实现对物体形状和尺寸的高精度测量。关键词:线激光旋转扫描;三维视觉测量;形状测量;尺寸测量;高精度引言随着工业制造和自动化技术的不断发展,对于三维物体形状和尺寸的精确测量需求越来越大