
一种四足机器人质心轨迹规划方法、装置及存储介质.pdf

宛菡****魔王


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种四足机器人质心轨迹规划方法、装置及存储介质.pdf
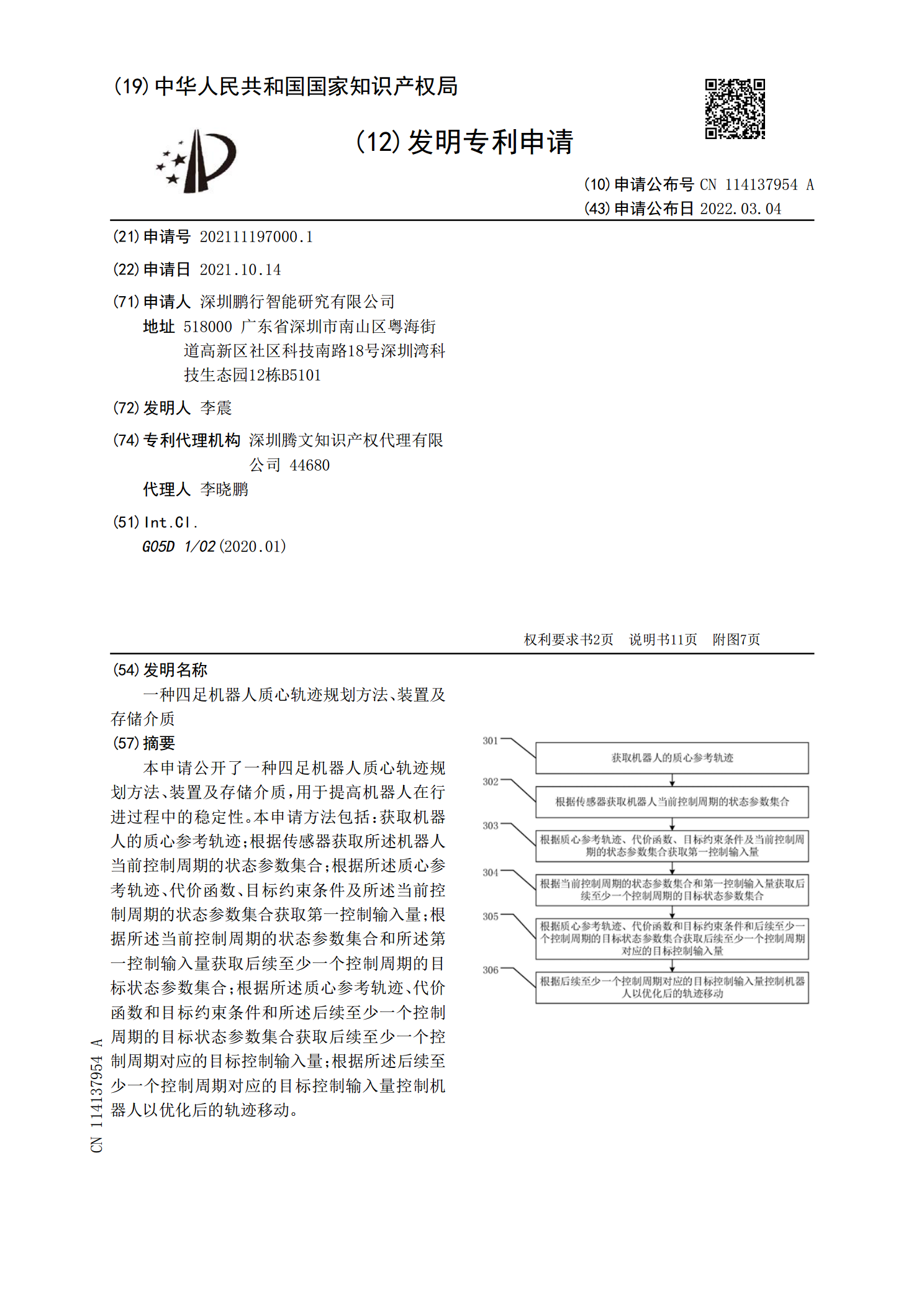
本申请公开了一种四足机器人质心轨迹规划方法、装置及存储介质,用于提高机器人在行进过程中的稳定性。本申请方法包括:获取机器人的质心参考轨迹;根据传感器获取所述机器人当前控制周期的状态参数集合;根据所述质心参考轨迹、代价函数、目标约束条件及所述当前控制周期的状态参数集合获取第一控制输入量;根据所述当前控制周期的状态参数集合和所述第一控制输入量获取后续至少一个控制周期的目标状态参数集合;根据所述质心参考轨迹、代价函数和目标约束条件和所述后续至少一个控制周期的目标状态参数集合获取后续至少一个控制周期对应的目标控制
双足机器人的运动轨迹规划方法、装置、设备及介质.pdf
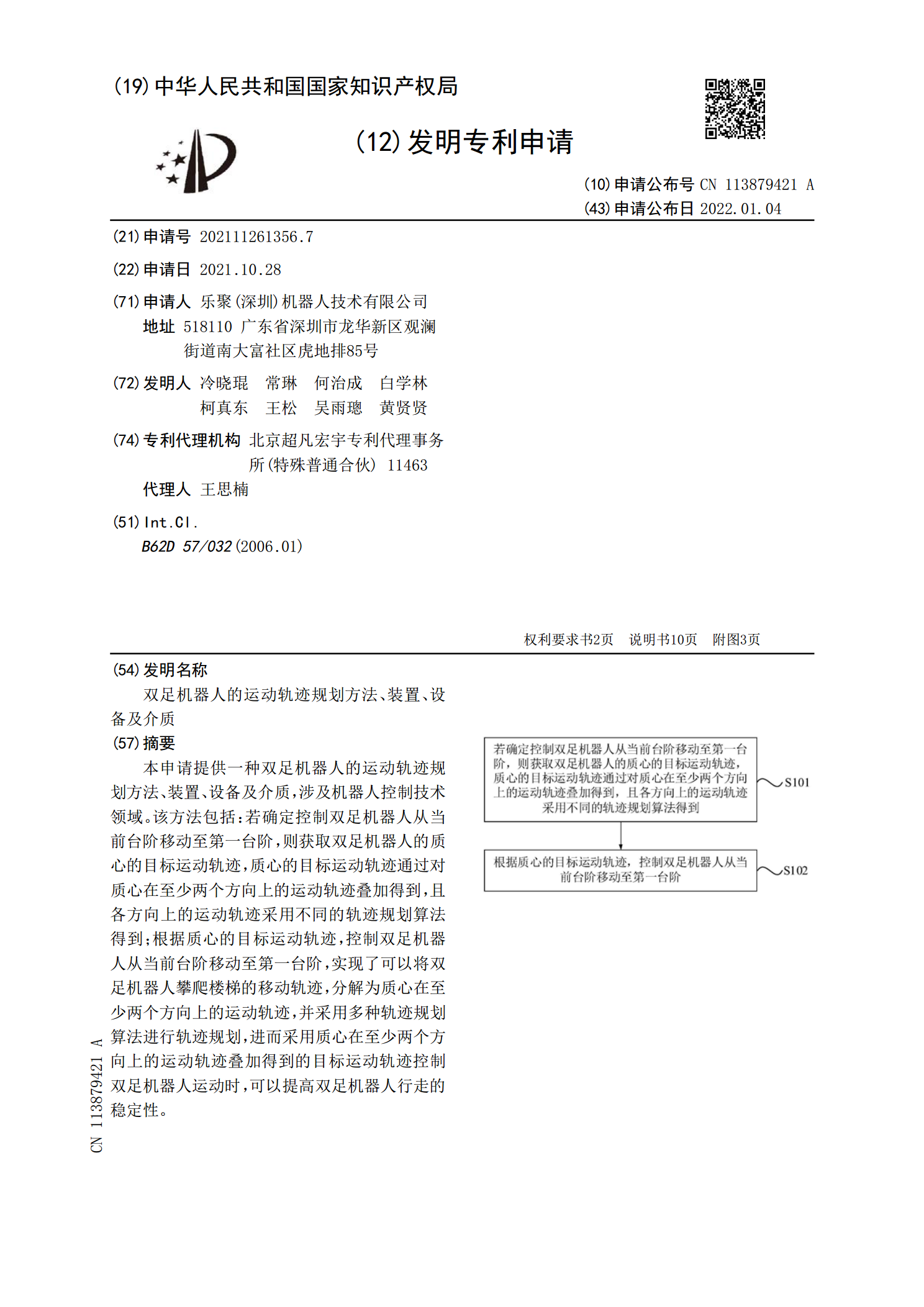
本申请提供一种双足机器人的运动轨迹规划方法、装置、设备及介质,涉及机器人控制技术领域。该方法包括:若确定控制双足机器人从当前台阶移动至第一台阶,则获取双足机器人的质心的目标运动轨迹,质心的目标运动轨迹通过对质心在至少两个方向上的运动轨迹叠加得到,且各方向上的运动轨迹采用不同的轨迹规划算法得到;根据质心的目标运动轨迹,控制双足机器人从当前台阶移动至第一台阶,实现了可以将双足机器人攀爬楼梯的移动轨迹,分解为质心在至少两个方向上的运动轨迹,并采用多种轨迹规划算法进行轨迹规划,进而采用质心在至少两个方向上的运动轨
一种双足机器人控制方法、装置、双足机器人及存储介质.pdf
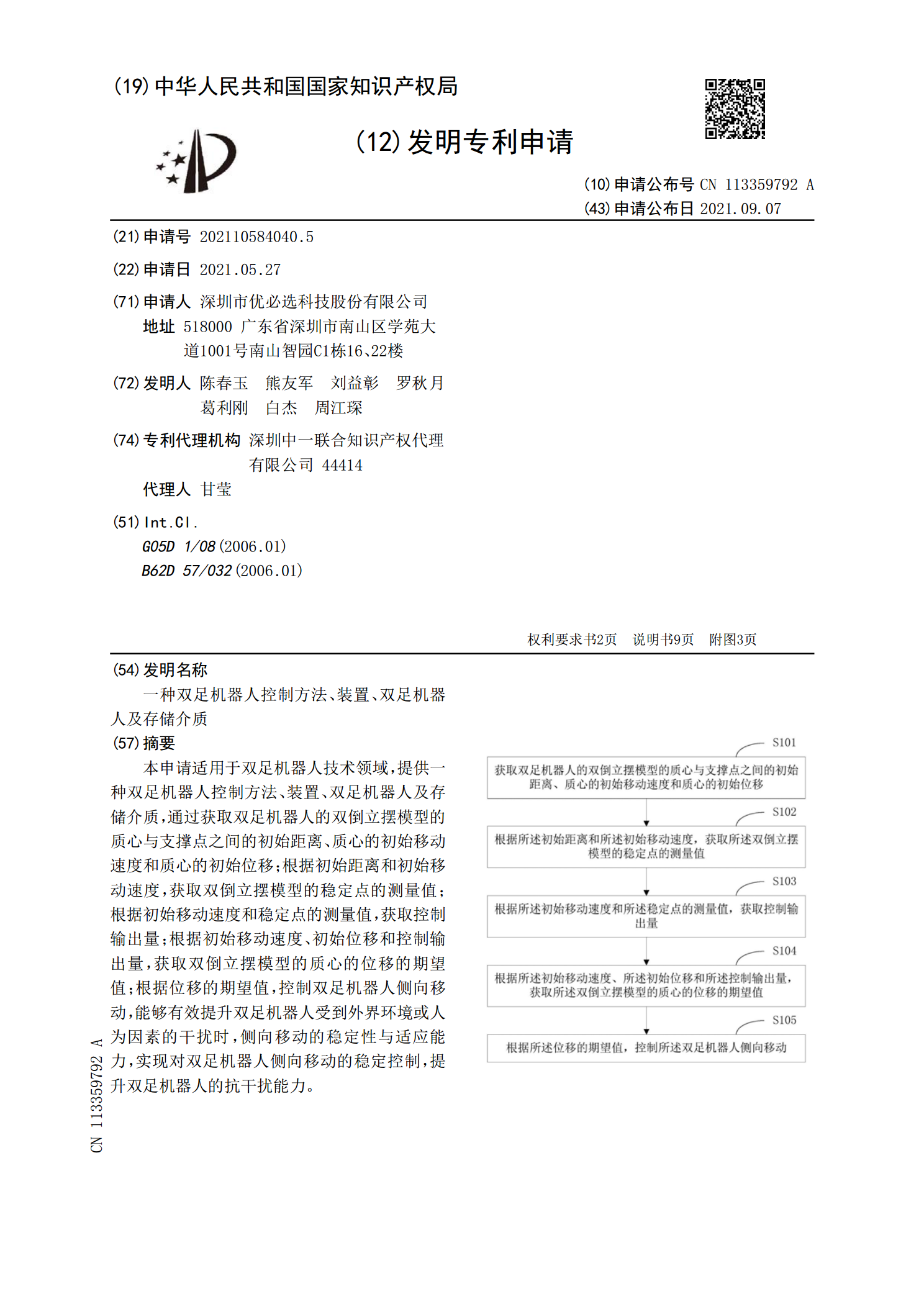
本申请适用于双足机器人技术领域,提供一种双足机器人控制方法、装置、双足机器人及存储介质,通过获取双足机器人的双倒立摆模型的质心与支撑点之间的初始距离、质心的初始移动速度和质心的初始位移;根据初始距离和初始移动速度,获取双倒立摆模型的稳定点的测量值;根据初始移动速度和稳定点的测量值,获取控制输出量;根据初始移动速度、初始位移和控制输出量,获取双倒立摆模型的质心的位移的期望值;根据位移的期望值,控制双足机器人侧向移动,能够有效提升双足机器人受到外界环境或人为因素的干扰时,侧向移动的稳定性与适应能力,实现对双足
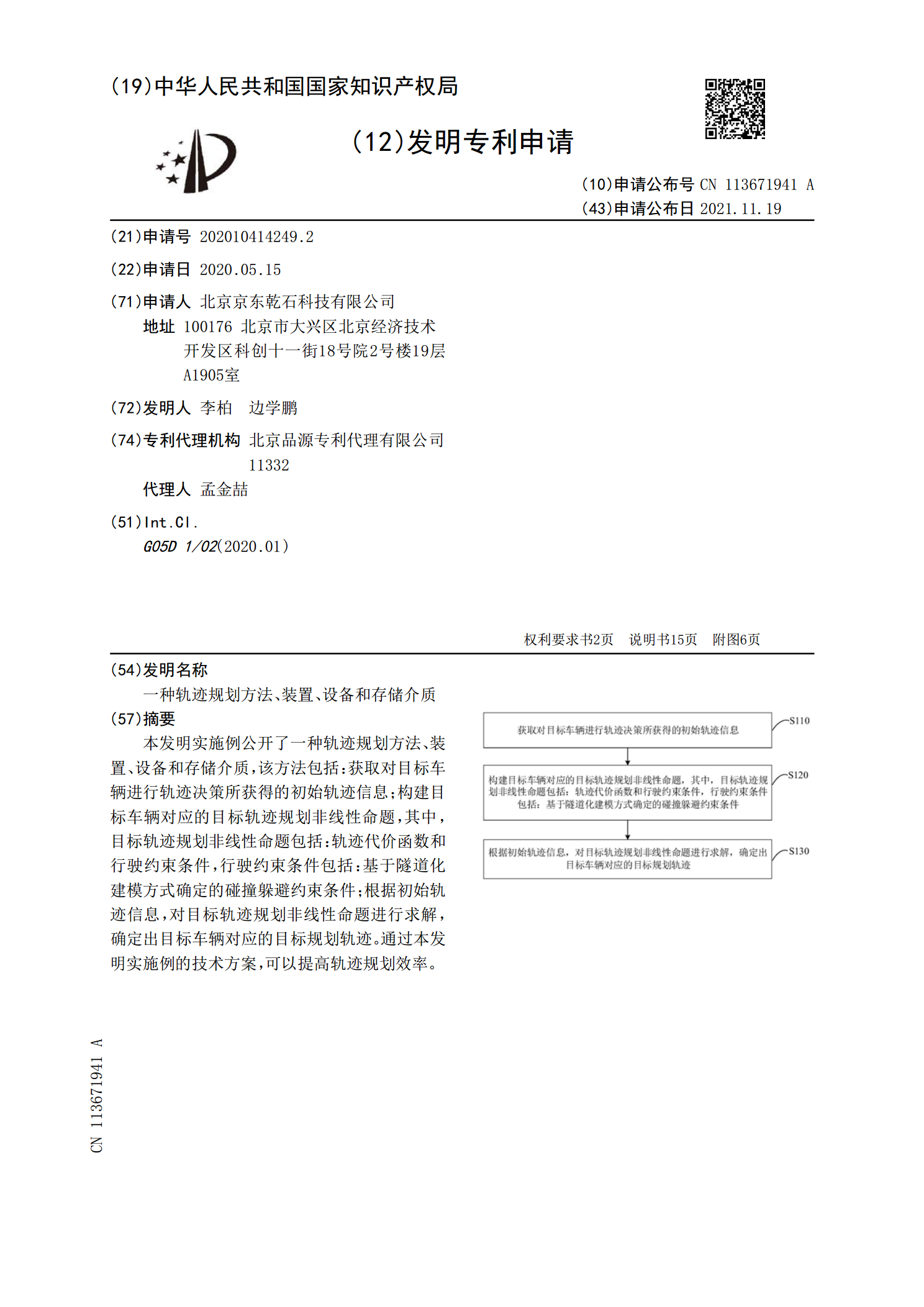
一种轨迹规划方法、装置、设备和存储介质.pdf
本发明实施例公开了一种轨迹规划方法、装置、设备和存储介质,该方法包括:获取对目标车辆进行轨迹决策所获得的初始轨迹信息;构建目标车辆对应的目标轨迹规划非线性命题,其中,目标轨迹规划非线性命题包括:轨迹代价函数和行驶约束条件,行驶约束条件包括:基于隧道化建模方式确定的碰撞躲避约束条件;根据初始轨迹信息,对目标轨迹规划非线性命题进行求解,确定出目标车辆对应的目标规划轨迹。通过本发明实施例的技术方案,可以提高轨迹规划效率。
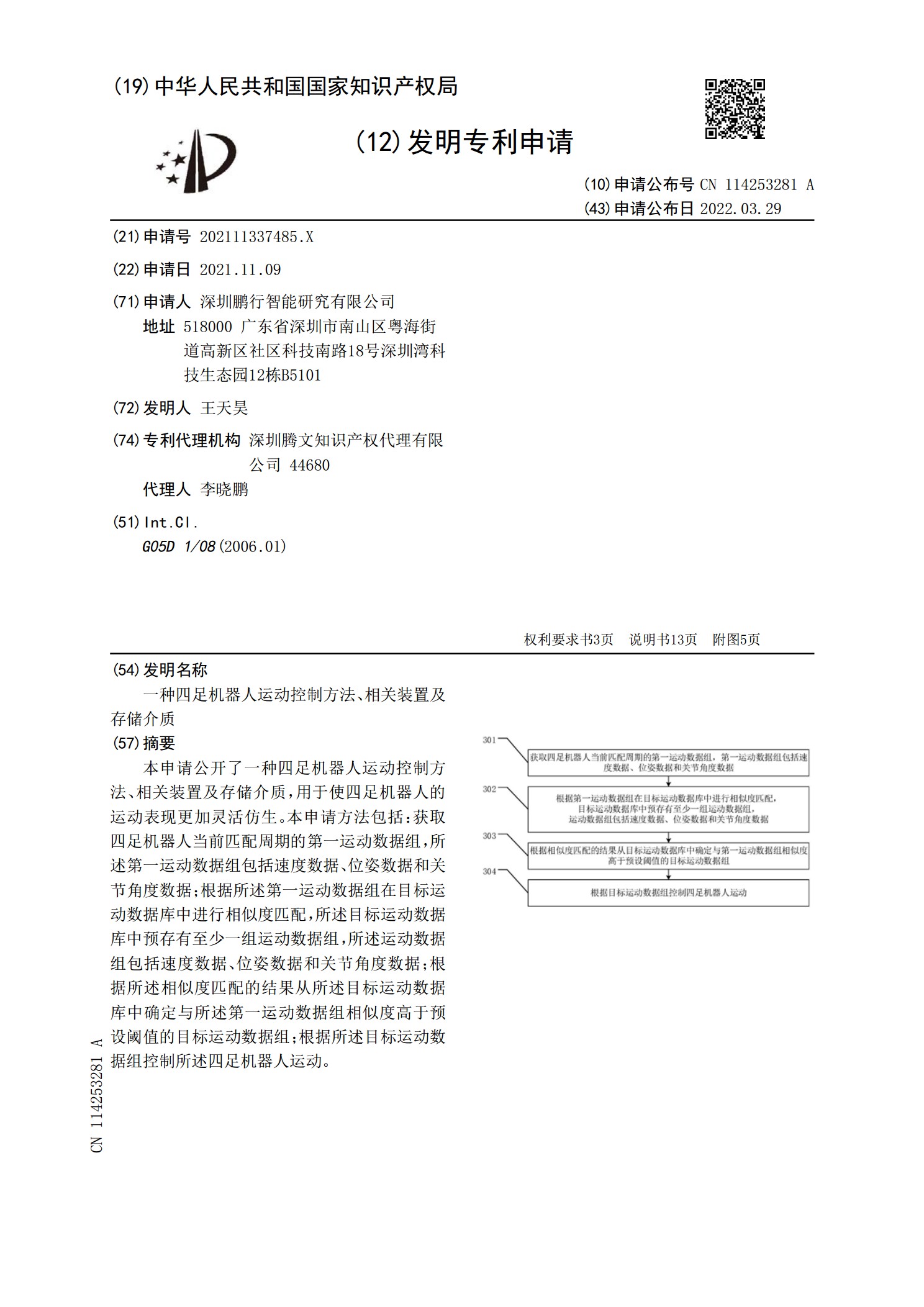
一种四足机器人运动控制方法、相关装置及存储介质.pdf
本申请公开了一种四足机器人运动控制方法、相关装置及存储介质,用于使四足机器人的运动表现更加灵活仿生。本申请方法包括:获取四足机器人当前匹配周期的第一运动数据组,所述第一运动数据组包括速度数据、位姿数据和关节角度数据;根据所述第一运动数据组在目标运动数据库中进行相似度匹配,所述目标运动数据库中预存有至少一组运动数据组,所述运动数据组包括速度数据、位姿数据和关节角度数据;根据所述相似度匹配的结果从所述目标运动数据库中确定与所述第一运动数据组相似度高于预设阈值的目标运动数据组;根据所述目标运动数据组控制所述四足