
适用于分布式电推进飞机多推进器的协同控制方法.pdf

Ch****91

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
适用于分布式电推进飞机多推进器的协同控制方法.pdf
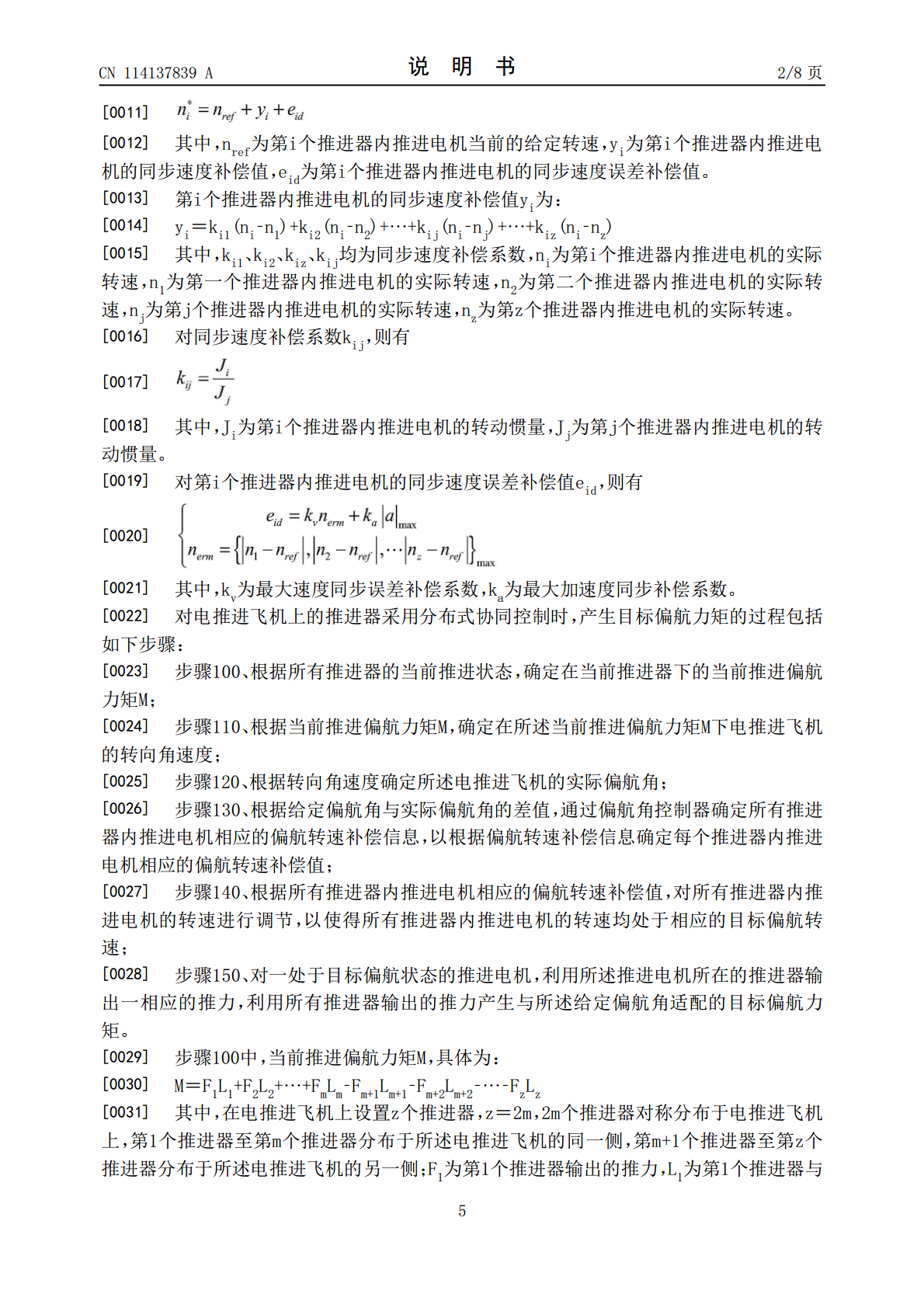
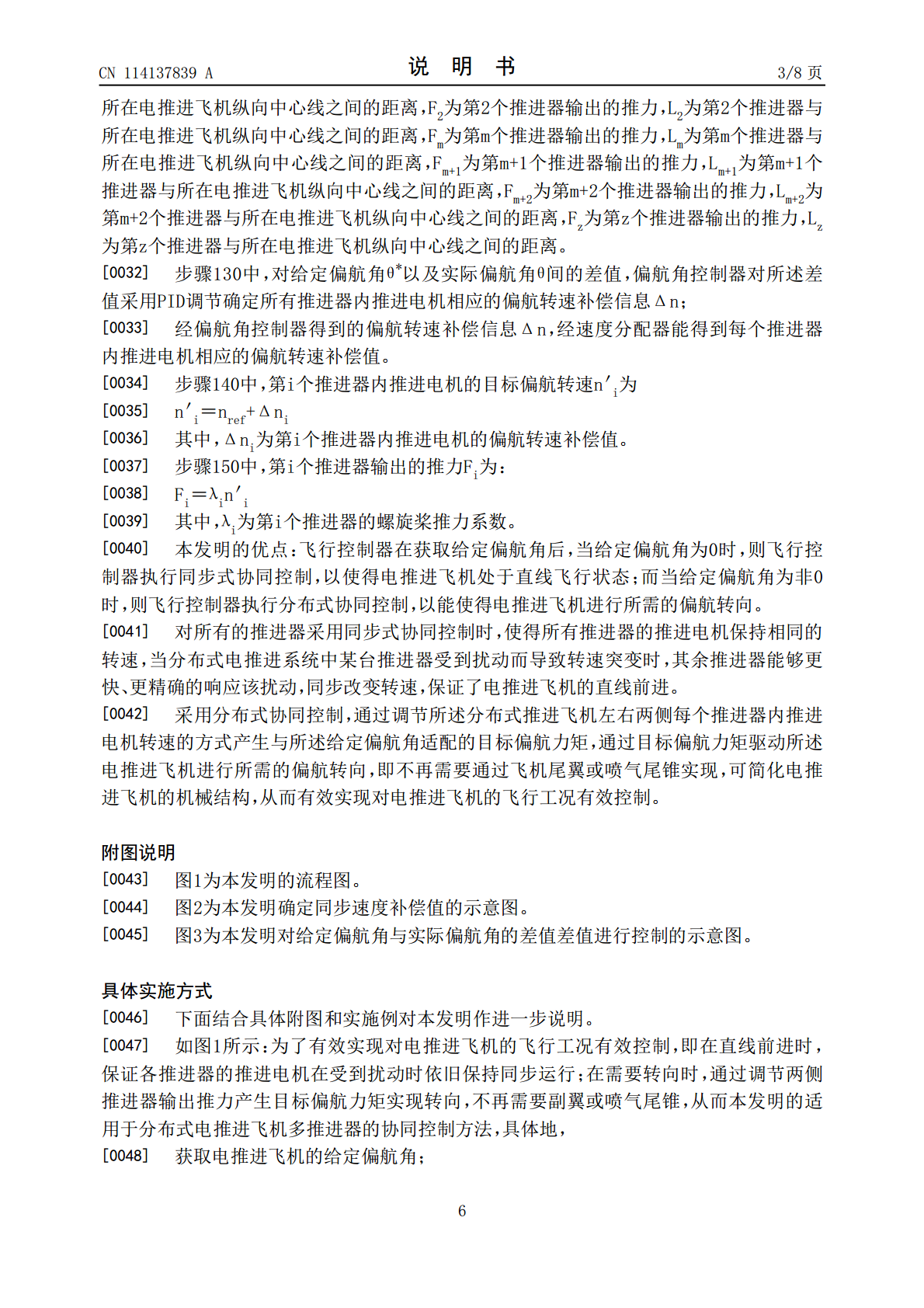
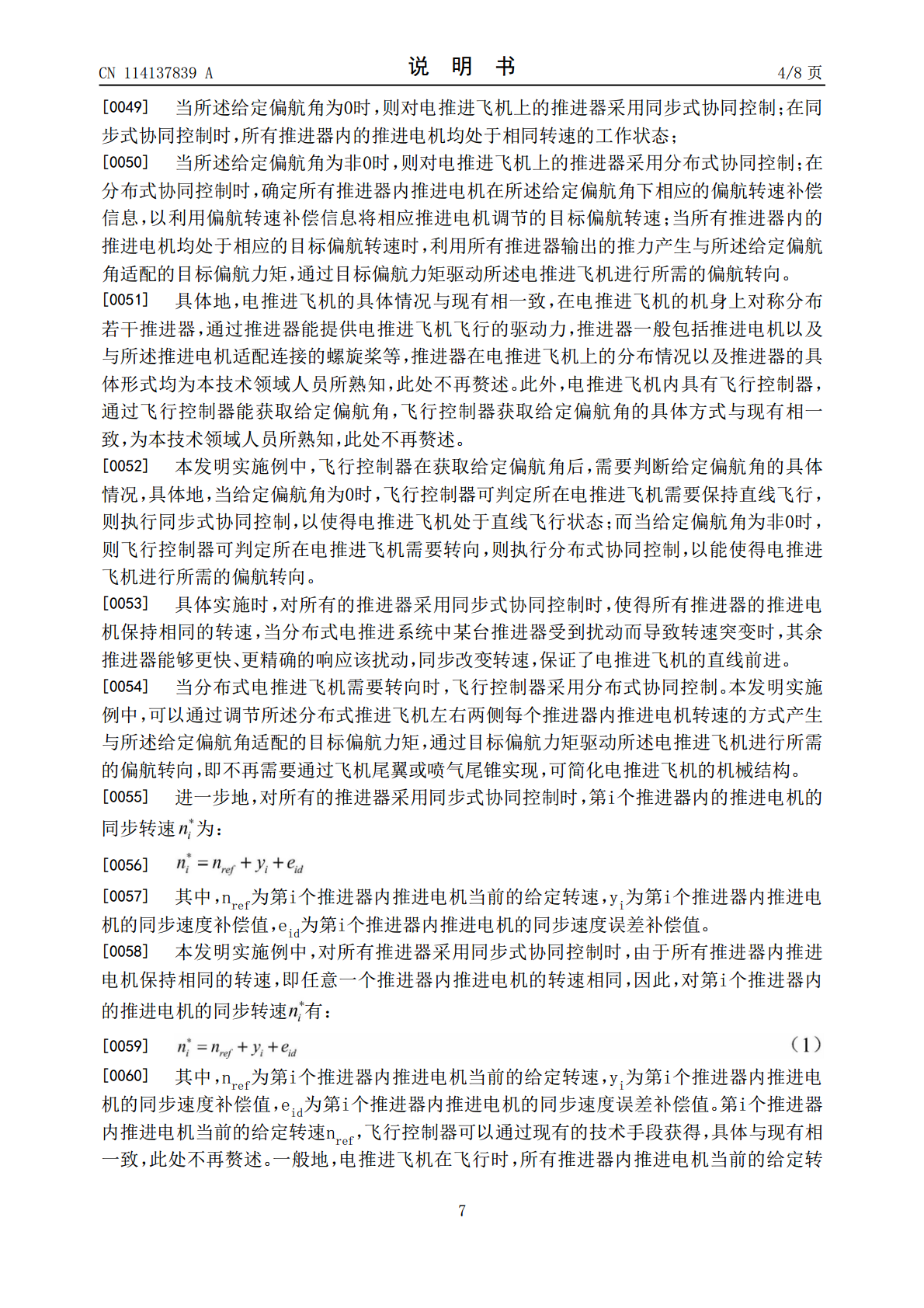
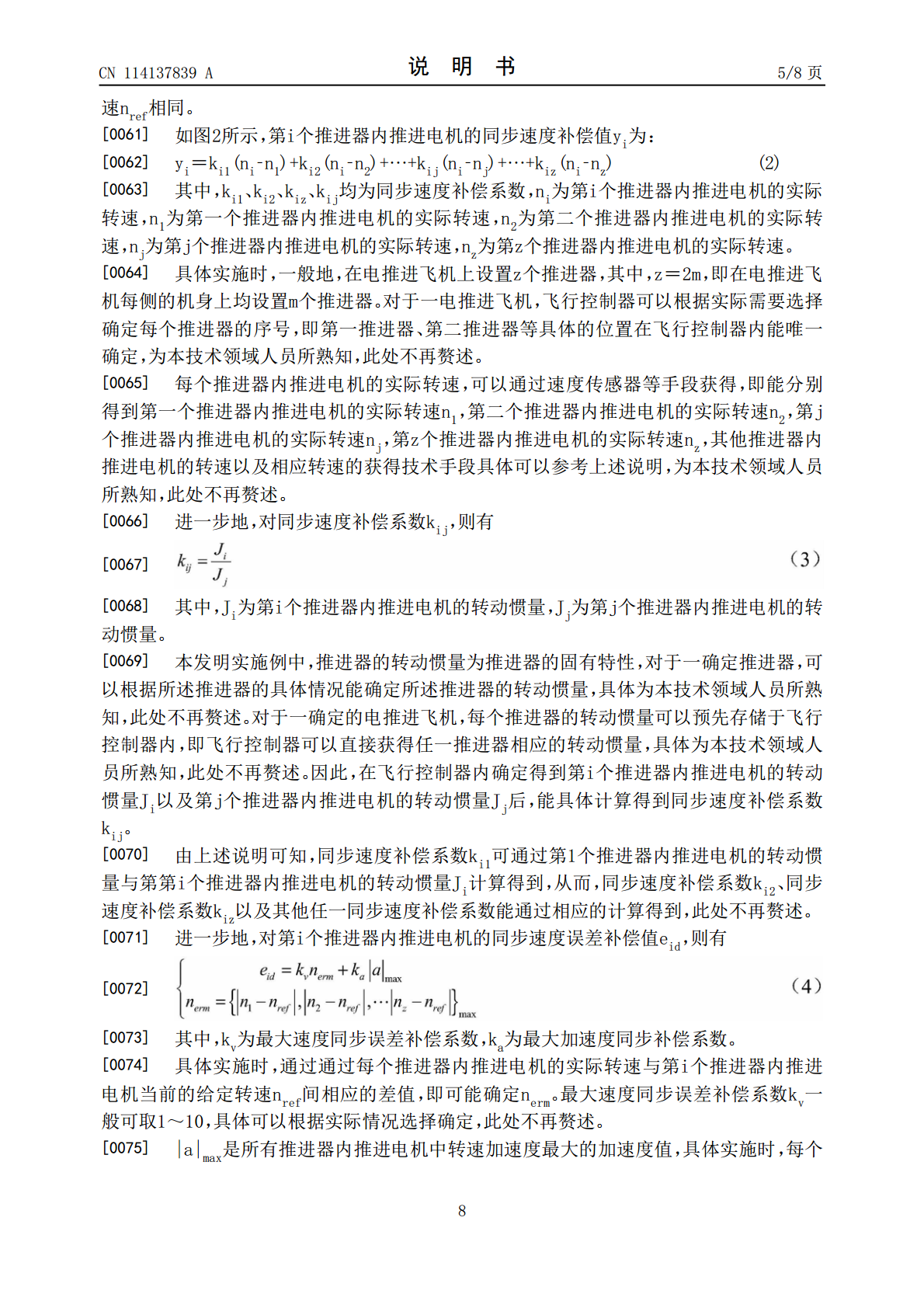
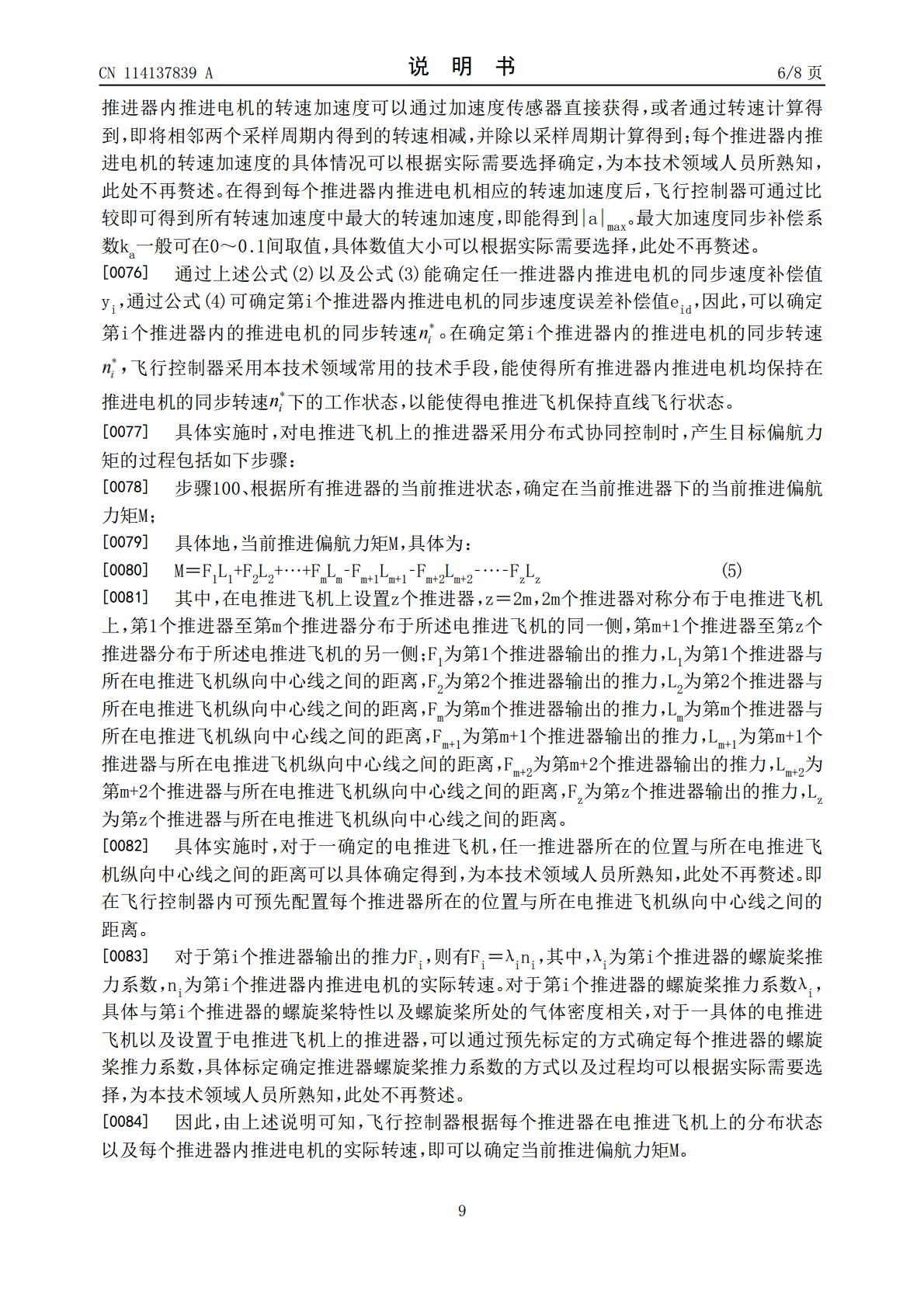
本发明涉及一种适用于分布式电推进飞机多推进器的协同控制方法。其当所述给定偏航角为0时,所有推进器内的推进电机均处于相同转速的工作状态;当所述给定偏航角为非0时,则对电推进飞机上的推进器采用分布式协同控制;在分布式协同控制时,当所有推进器内的推进电机均处于相应的目标偏航转速时,利用所有推进器输出的推力产生与所述给定偏航角适配的目标偏航力矩,通过目标偏航力矩驱动所述电推进飞机进行所需的偏航转向。本发明通过同步式协同控制,保证各推进电机在受到扰动时依旧保持同步运行;在需要转向时,通过分布式协同控制,不再需要副翼
一种适用于多电飞机的电机控制器分时复用方法.pdf
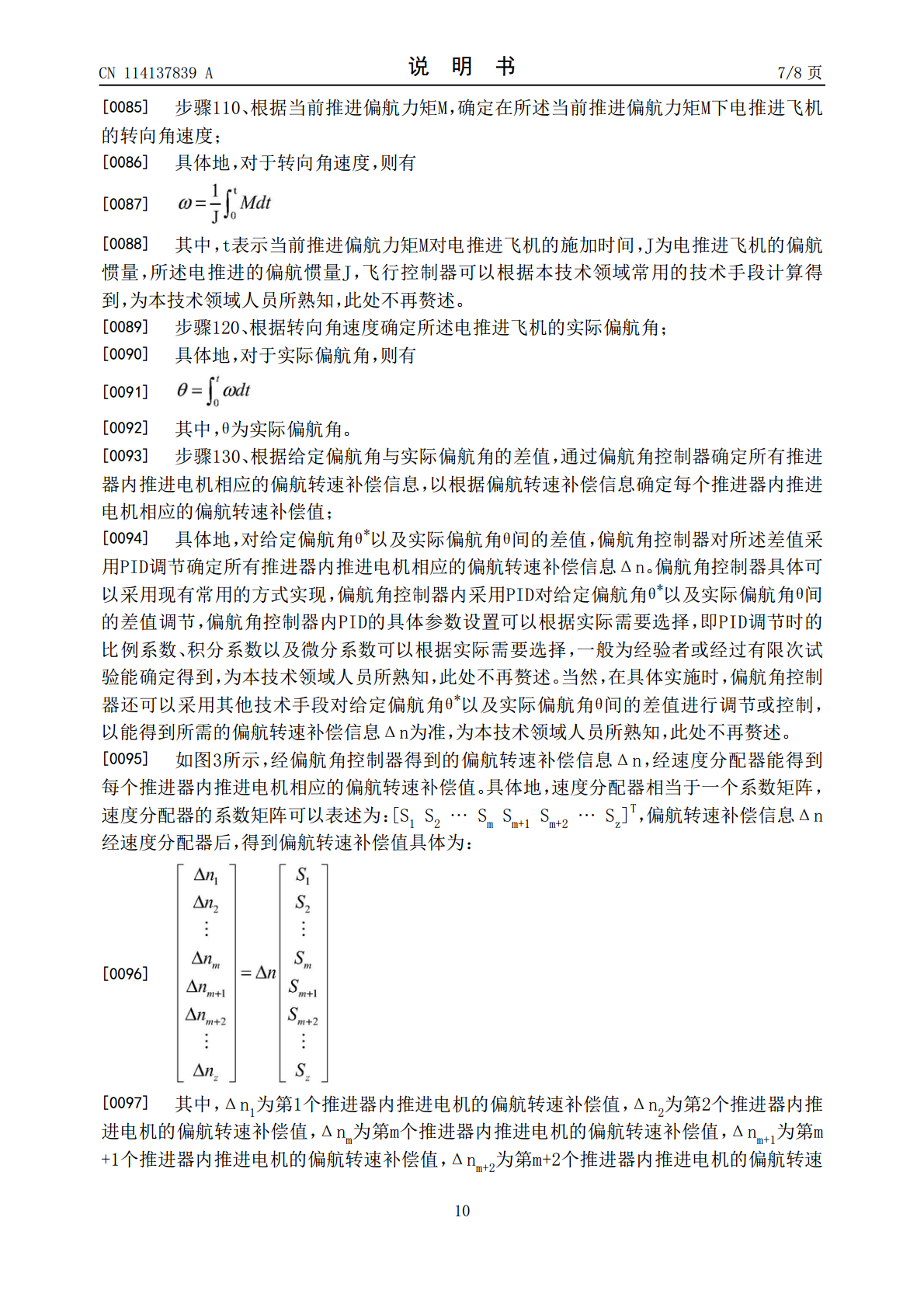
本申请属于电机控制器设计领域,特别涉及一种适用于多电飞机的电机控制器分时复用方法。该方法包括步骤S1、进行系统自检,检测系统是否存在故障;步骤S2、判断目前工作状态,如果处于发动机起动状态,则启用交流起动发电机的起动程序;如果处于电动泵控制状态,则启用电动泵永磁同步电机的控制程序;如果处于电环控压缩机控制状态,则启用电环控无刷直流电机的控制程序;步骤S3、进行电机信号采集;步骤S4、进行相应控制。本申请有效避免了发动机电起动完成后起动控制器成为飞机死重,不仅能够降低机载电驱动系统的体积、重量,还可以有效提

磁耦合推进器及其控制方法.pdf
本发明所述磁耦合推进器及其控制方法,针对内外转子磁极进行改进,以期有效提高电机输出轴与叶轮驱动轴之间的同步性能、实现精确地冲量控制的设计目的。磁耦合推进器包括有一筒体,在筒体两端分别固定有前端盖和后端盖;在后端盖与电机架之间固定有伺服电机,叶轮贯穿连接于前端盖。在伺服电机的驱动轴端部连接有外转子,在外转子内壁上设置有一组外转子永磁块;在叶轮的输出轴端部连接有内转子,内转子具有用以套设于输出轴端部的内套轴,在内套轴与内转子内壁上分别设置有一组内转子永磁块;外转子永磁块与每一组内转子永磁块的数量相等;沿圆周方
一种电推进器绝缘防护方法.pdf
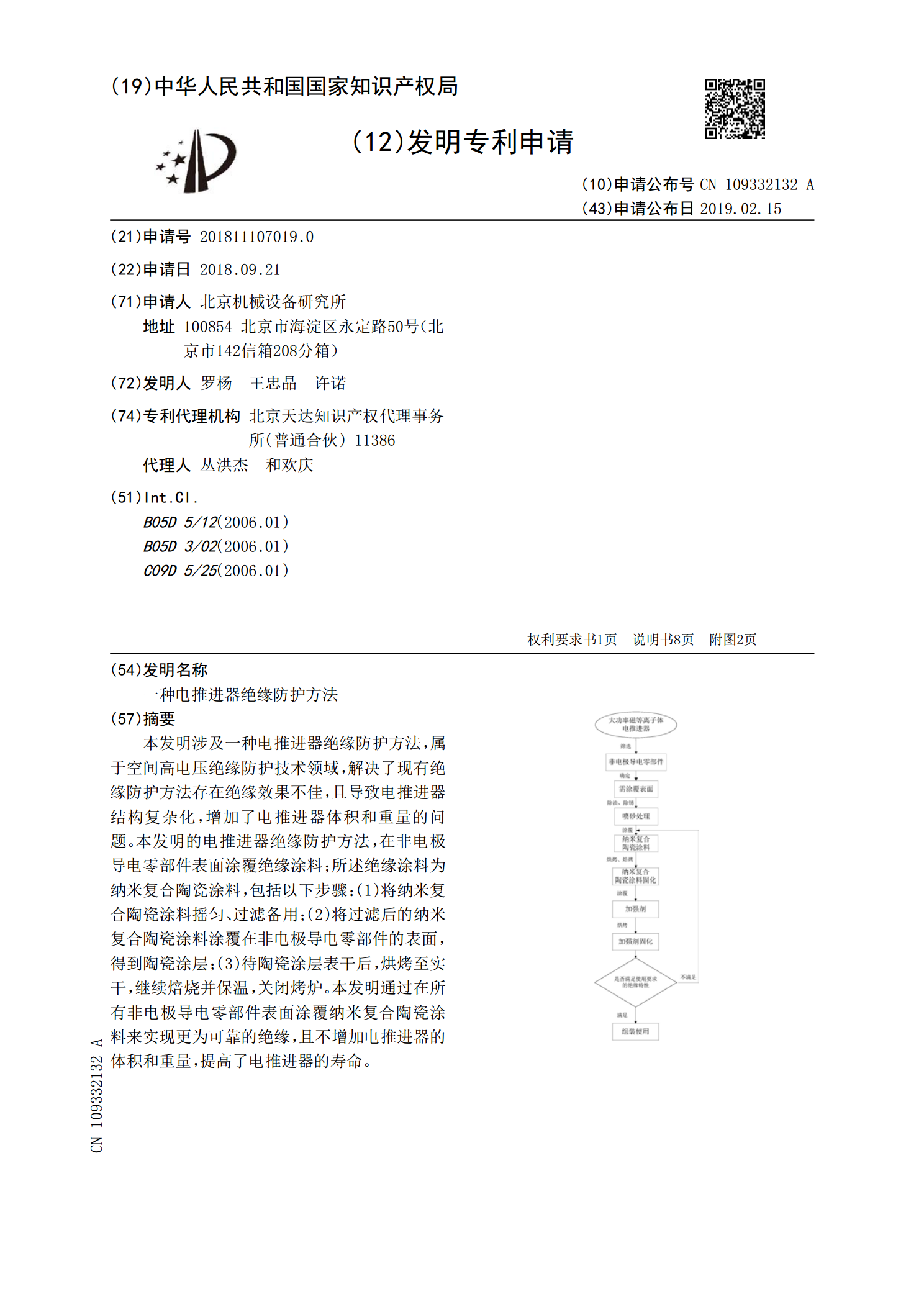
本发明涉及一种电推进器绝缘防护方法,属于空间高电压绝缘防护技术领域,解决了现有绝缘防护方法存在绝缘效果不佳,且导致电推进器结构复杂化,增加了电推进器体积和重量的问题。本发明的电推进器绝缘防护方法,在非电极导电零部件表面涂覆绝缘涂料;所述绝缘涂料为纳米复合陶瓷涂料,包括以下步骤:(1)将纳米复合陶瓷涂料摇匀、过滤备用;(2)将过滤后的纳米复合陶瓷涂料涂覆在非电极导电零部件的表面,得到陶瓷涂层;(3)待陶瓷涂层表干后,烘烤至实干,继续焙烧并保温,关闭烤炉。本发明通过在所有非电极导电零部件表面涂覆纳米复合陶瓷涂
推进器和使推进器运动的方法.pdf
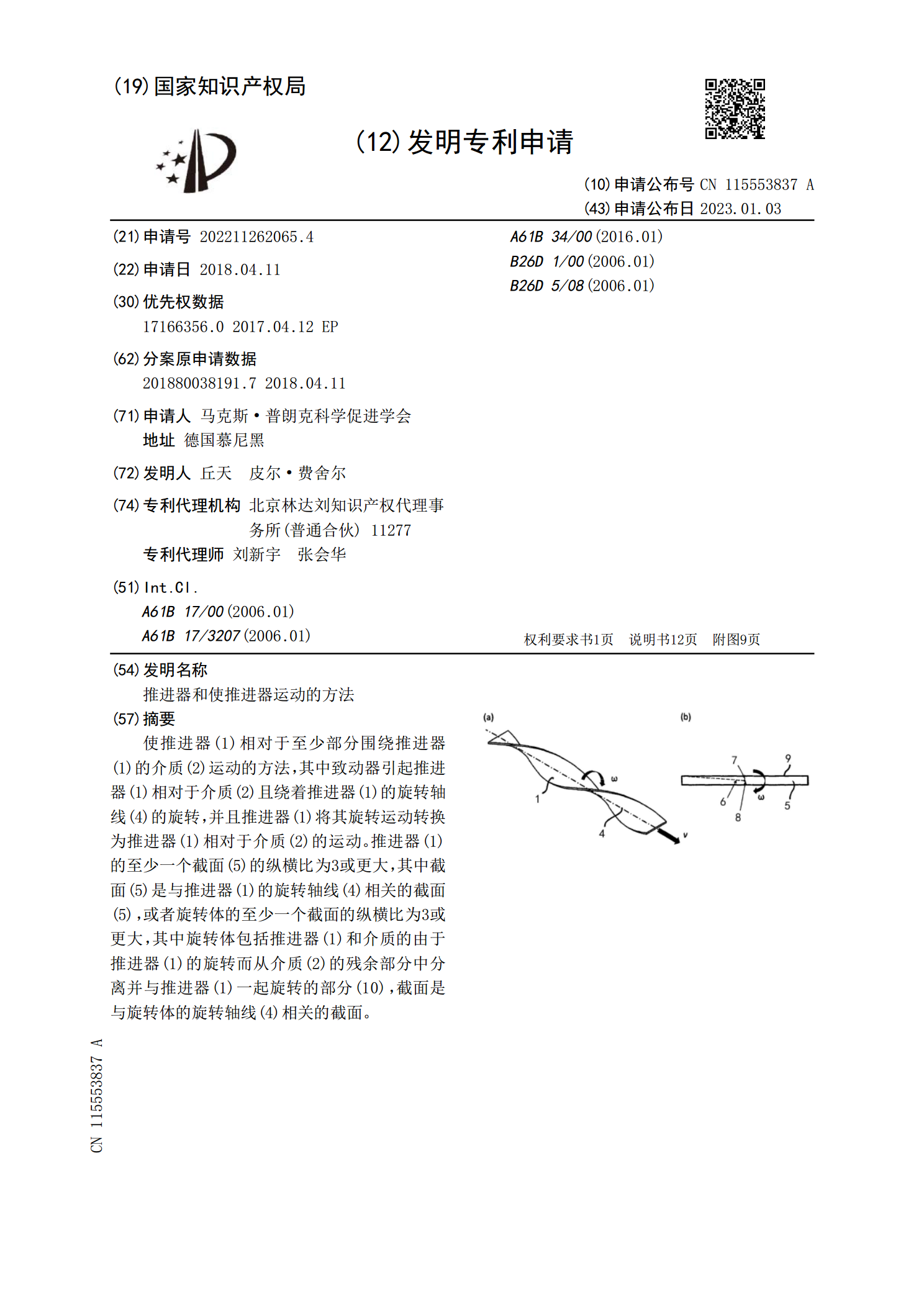
使推进器(1)相对于至少部分围绕推进器(1)的介质(2)运动的方法,其中致动器引起推进器(1)相对于介质(2)且绕着推进器(1)的旋转轴线(4)的旋转,并且推进器(1)将其旋转运动转换为推进器(1)相对于介质(2)的运动。推进器(1)的至少一个截面(5)的纵横比为3或更大,其中截面(5)是与推进器(1)的旋转轴线(4)相关的截面(5),或者旋转体的至少一个截面的纵横比为3或更大,其中旋转体包括推进器(1)和介质的由于推进器(1)的旋转而从介质(2)的残余部分中分离并与推进器(1)一起旋转的部分(10),截