
一种适用于多电飞机的电机控制器分时复用方法.pdf

是你****松呀

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种适用于多电飞机的电机控制器分时复用方法.pdf
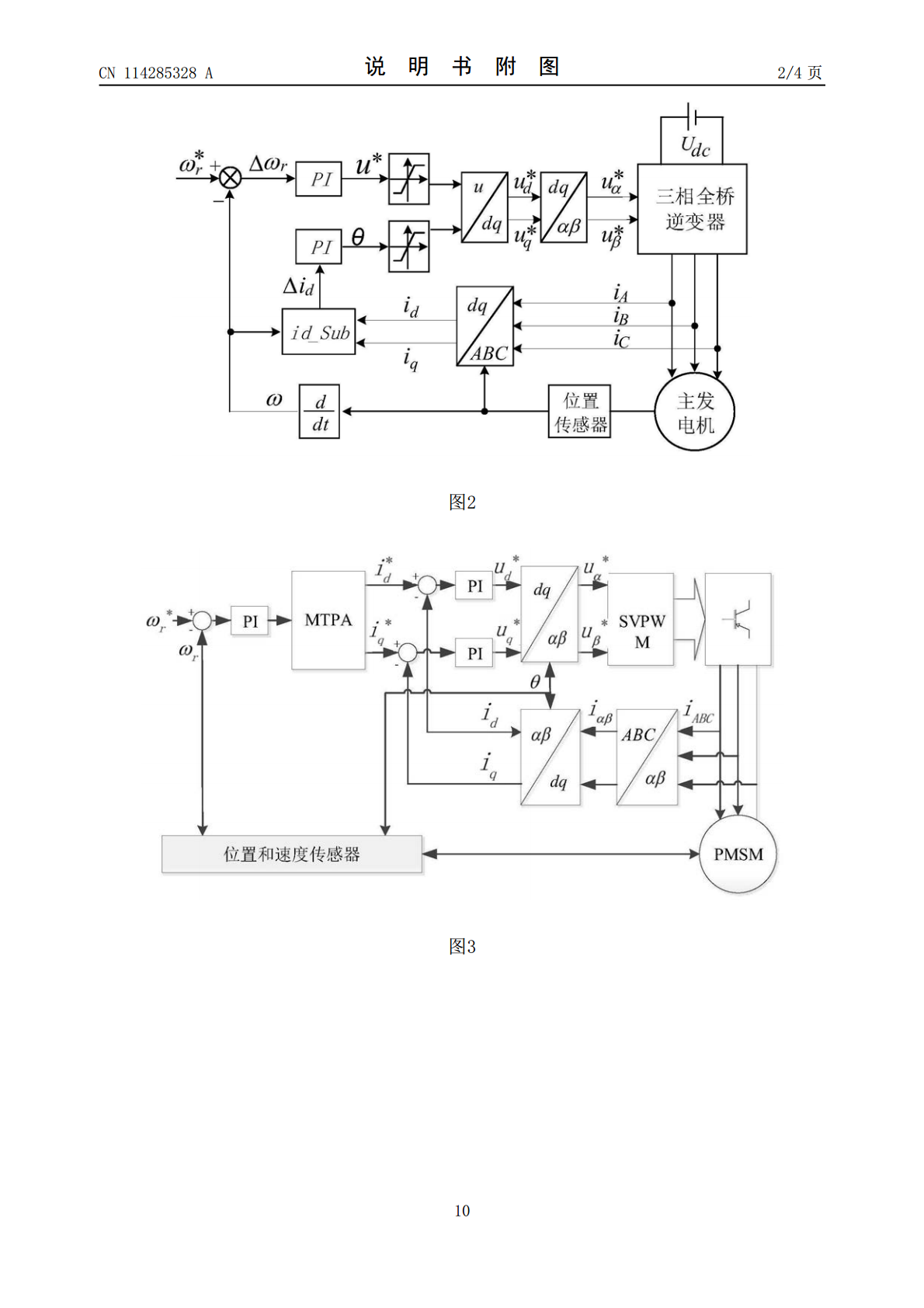
本申请属于电机控制器设计领域,特别涉及一种适用于多电飞机的电机控制器分时复用方法。该方法包括步骤S1、进行系统自检,检测系统是否存在故障;步骤S2、判断目前工作状态,如果处于发动机起动状态,则启用交流起动发电机的起动程序;如果处于电动泵控制状态,则启用电动泵永磁同步电机的控制程序;如果处于电环控压缩机控制状态,则启用电环控无刷直流电机的控制程序;步骤S3、进行电机信号采集;步骤S4、进行相应控制。本申请有效避免了发动机电起动完成后起动控制器成为飞机死重,不仅能够降低机载电驱动系统的体积、重量,还可以有效提
一种多路视频分时复用编码方法和系统.pdf
本发明公开了一种多路视频分时复用编码方法和系统,所述方法包括如下步骤:对编码器配置开始影子寄存器,根据所述开始影子寄存器的预开始信号判定当前视频帧的开始位置;配置编码使能寄存器,根据所述编码使能寄存器的使能信号判断当前的码流形式;配置存储使能寄存器,在内存中存储固定行的编码单元,根据所述存储使能寄存器的存储使能信号存储对应形式的码流;根据码流通路选择信号判断当前待编码的码流形式,配置编码优先级,并在完成当前编码单元的存储后判断下一个编码单元待编码的码流形式。所述方法和系统通过改变地址映射,可以实现一帧的请
基于分时复用的多通道探地雷达抗干扰方法及系统.pdf
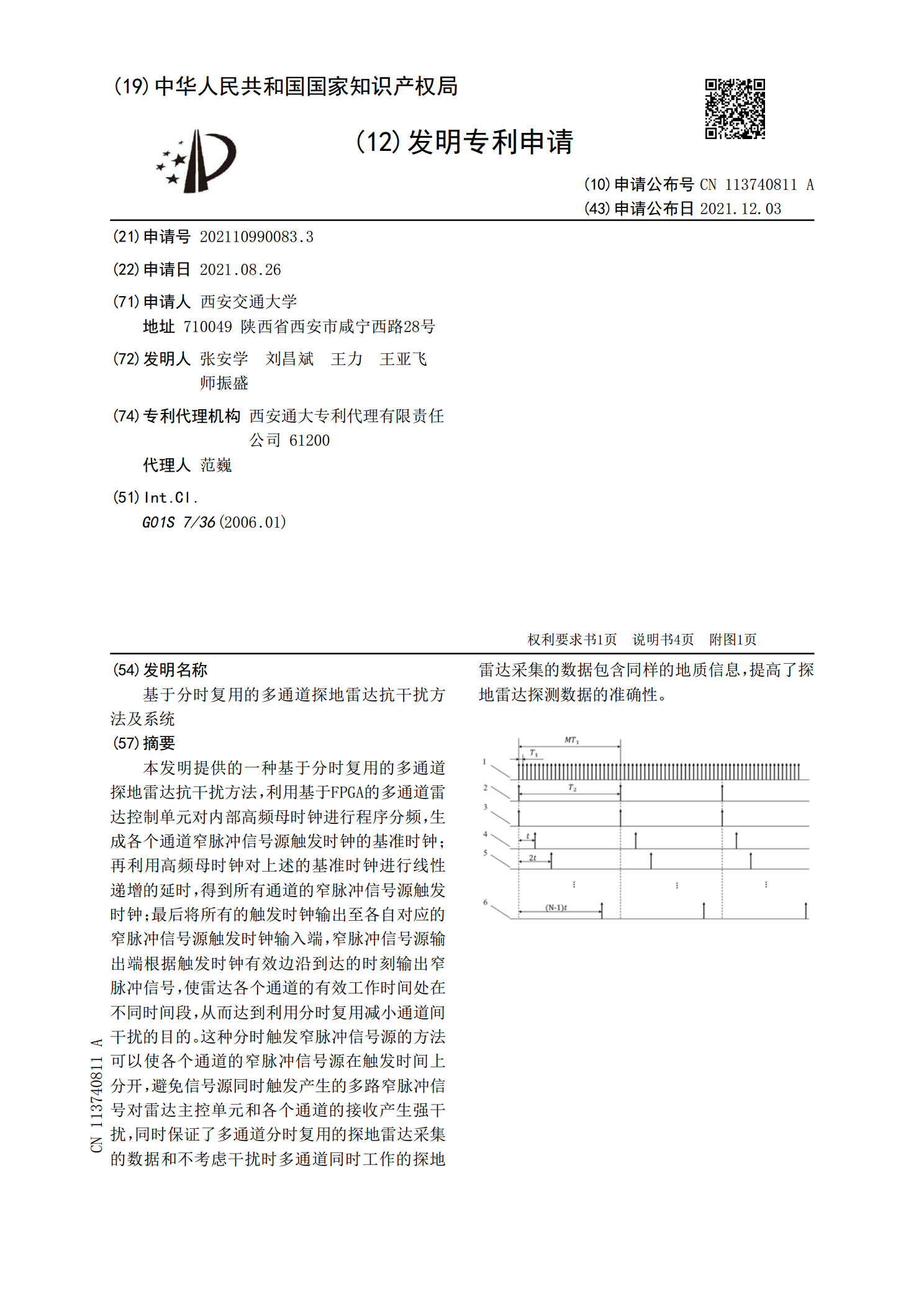
本发明提供的一种基于分时复用的多通道探地雷达抗干扰方法,利用基于FPGA的多通道雷达控制单元对内部高频母时钟进行程序分频,生成各个通道窄脉冲信号源触发时钟的基准时钟;再利用高频母时钟对上述的基准时钟进行线性递增的延时,得到所有通道的窄脉冲信号源触发时钟;最后将所有的触发时钟输出至各自对应的窄脉冲信号源触发时钟输入端,窄脉冲信号源输出端根据触发时钟有效边沿到达的时刻输出窄脉冲信号,使雷达各个通道的有效工作时间处在不同时间段,从而达到利用分时复用减小通道间干扰的目的。这种分时触发窄脉冲信号源的方法可以使各个通
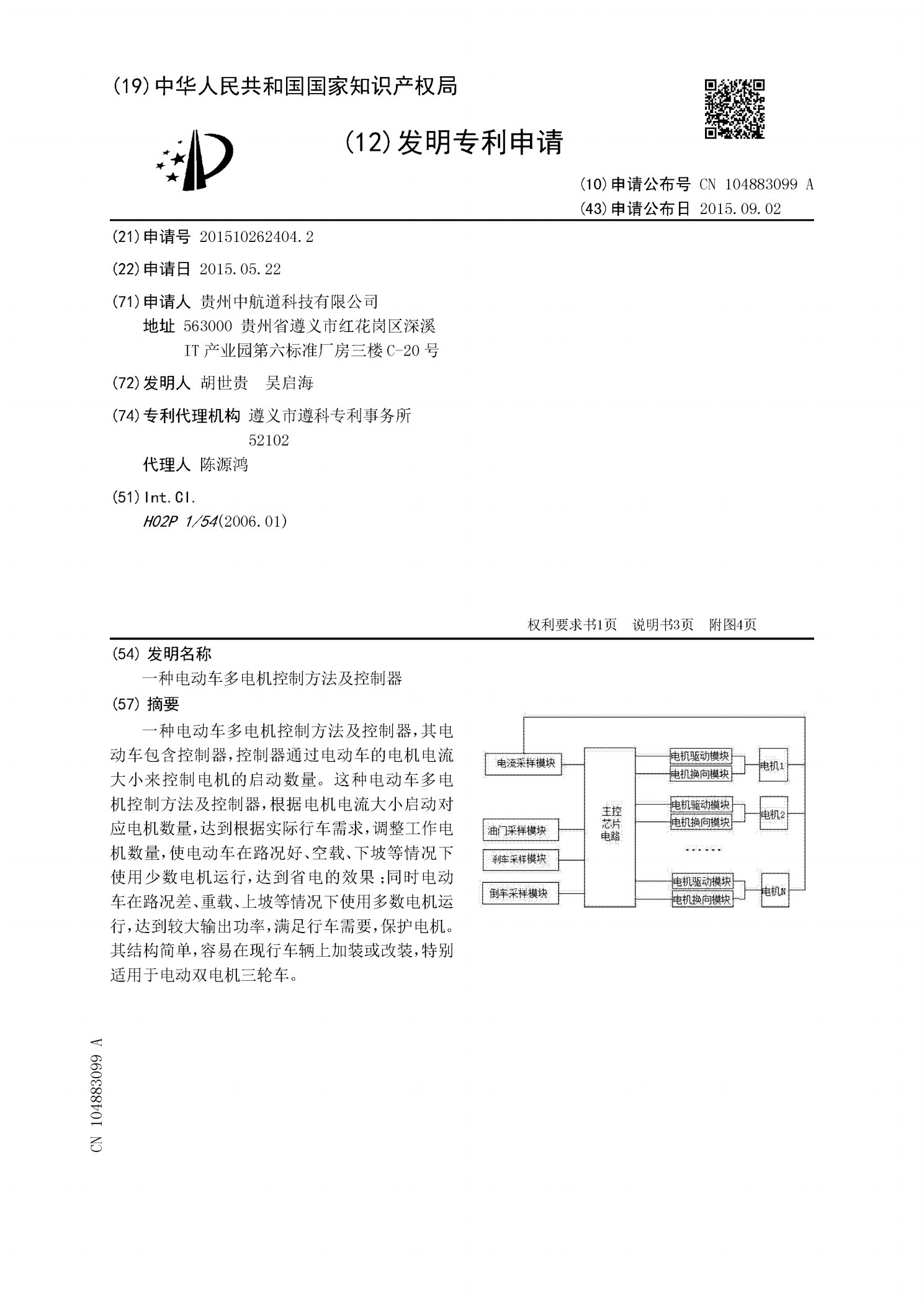
一种电动车多电机控制方法及控制器.pdf
一种电动车多电机控制方法及控制器,其电动车包含控制器,控制器通过电动车的电机电流大小来控制电机的启动数量。这种电动车多电机控制方法及控制器,根据电机电流大小启动对应电机数量,达到根据实际行车需求,调整工作电机数量,使电动车在路况好、空载、下坡等情况下使用少数电机运行,达到省电的效果;同时电动车在路况差、重载、上坡等情况下使用多数电机运行,达到较大输出功率,满足行车需要,保护电机。其结构简单,容易在现行车辆上加装或改装,特别适用于电动双电机三轮车。
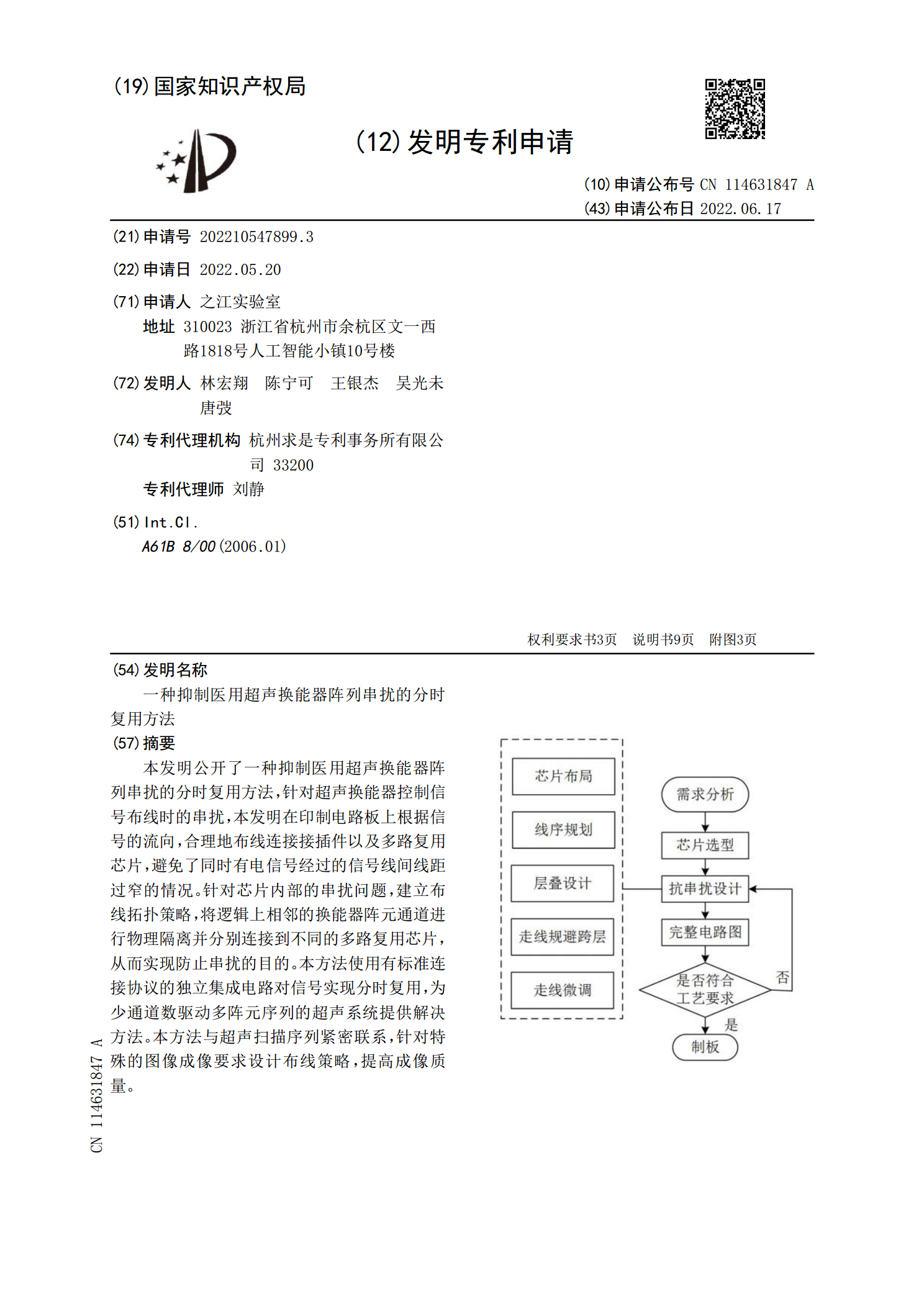
一种抑制医用超声换能器阵列串扰的分时复用方法.pdf
本发明公开了一种抑制医用超声换能器阵列串扰的分时复用方法,针对超声换能器控制信号布线时的串扰,本发明在印制电路板上根据信号的流向,合理地布线连接接插件以及多路复用芯片,避免了同时有电信号经过的信号线间线距过窄的情况。针对芯片内部的串扰问题,建立布线拓扑策略,将逻辑上相邻的换能器阵元通道进行物理隔离并分别连接到不同的多路复用芯片,从而实现防止串扰的目的。本方法使用有标准连接协议的独立集成电路对信号实现分时复用,为少通道数驱动多阵元序列的超声系统提供解决方法。本方法与超声扫描序列紧密联系,针对特殊的图像成像要