
一种实时轻量级2D人体姿态估计方法.pdf

是秋****写意

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种实时轻量级2D人体姿态估计方法.pdf
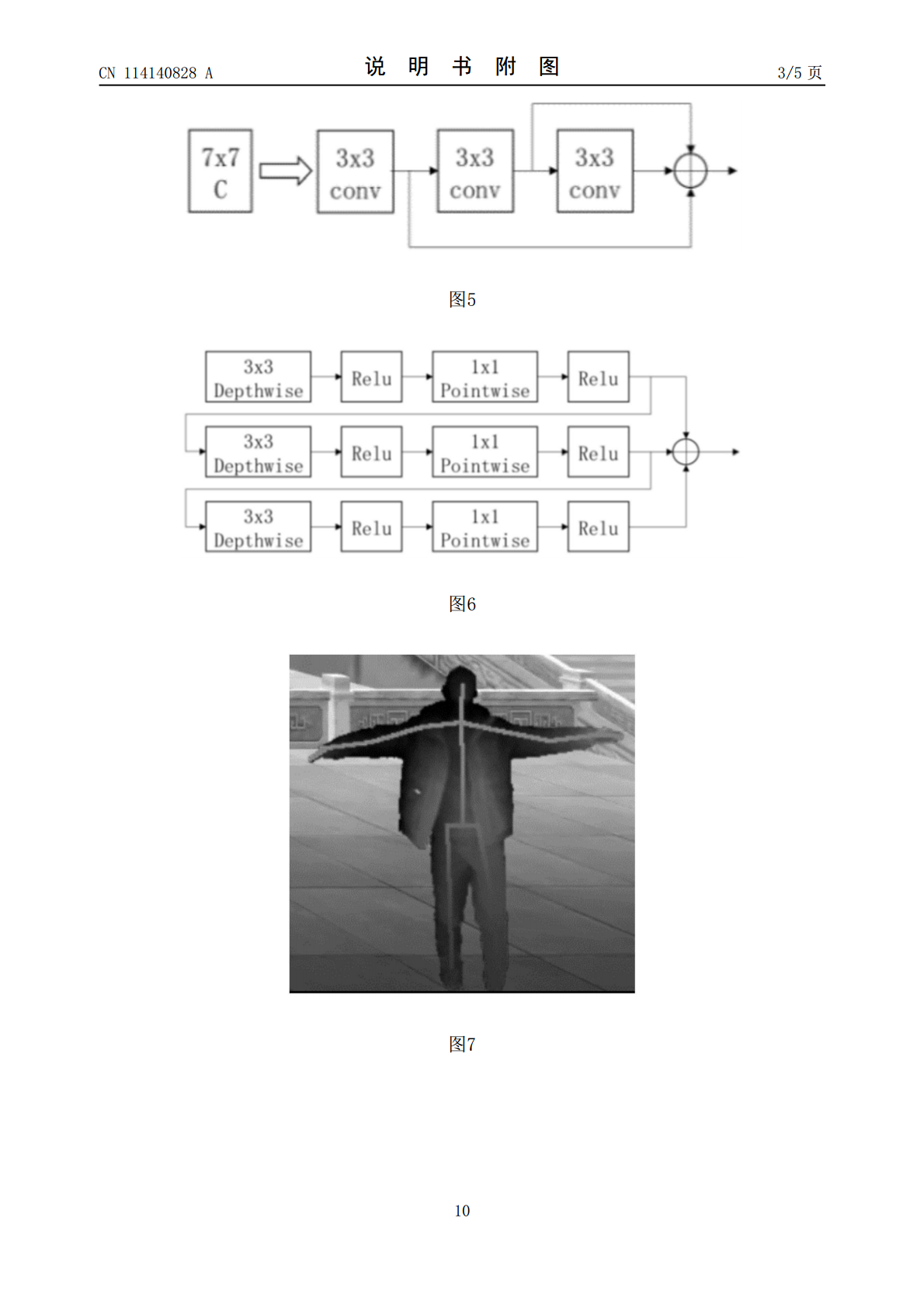
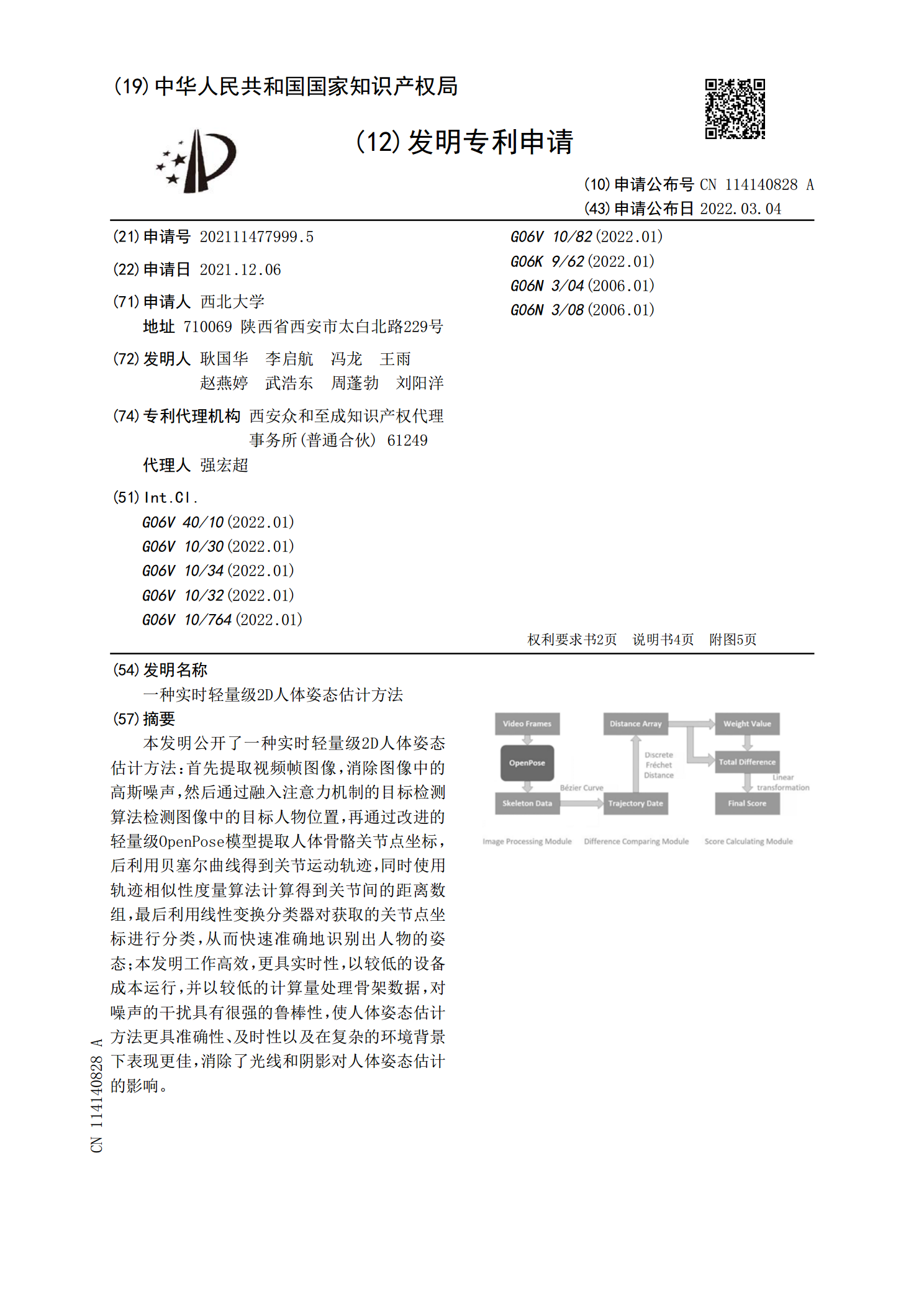
本发明公开了一种实时轻量级2D人体姿态估计方法:首先提取视频帧图像,消除图像中的高斯噪声,然后通过融入注意力机制的目标检测算法检测图像中的目标人物位置,再通过改进的轻量级OpenPose模型提取人体骨骼关节点坐标,后利用贝塞尔曲线得到关节运动轨迹,同时使用轨迹相似性度量算法计算得到关节间的距离数组,最后利用线性变换分类器对获取的关节点坐标进行分类,从而快速准确地识别出人物的姿态;本发明工作高效,更具实时性,以较低的设备成本运行,并以较低的计算量处理骨架数据,对噪声的干扰具有很强的鲁棒性,使人体姿态估计方法

一种轻量级的实时人体姿态估计方法.pdf
本发明公开了一种轻量级的实时人体姿态估计方法,加载训练数据COCO或者MPII等数据集,通过数据增强方法生成训练数据Heatmap特征图和关键点;分别训练Heatmap预测模块和回归预测模块;裁剪模型结构,去掉Heatmap预测模块,保留回归预测模块,直接预测人体关键点。本发明针对传统模型结构复杂,难以满足实时处理的问题,采用轻量级网络MobilenetV2重构Hourglass网络模型作为主干网络进行预测,可在嵌入式设备上进行实时推理;增加回归模块预测方法,直接预测人体关键点,有效降低CPU和内存占用,
一种变电站场景下的实时3D人体姿态估计的方法.pdf
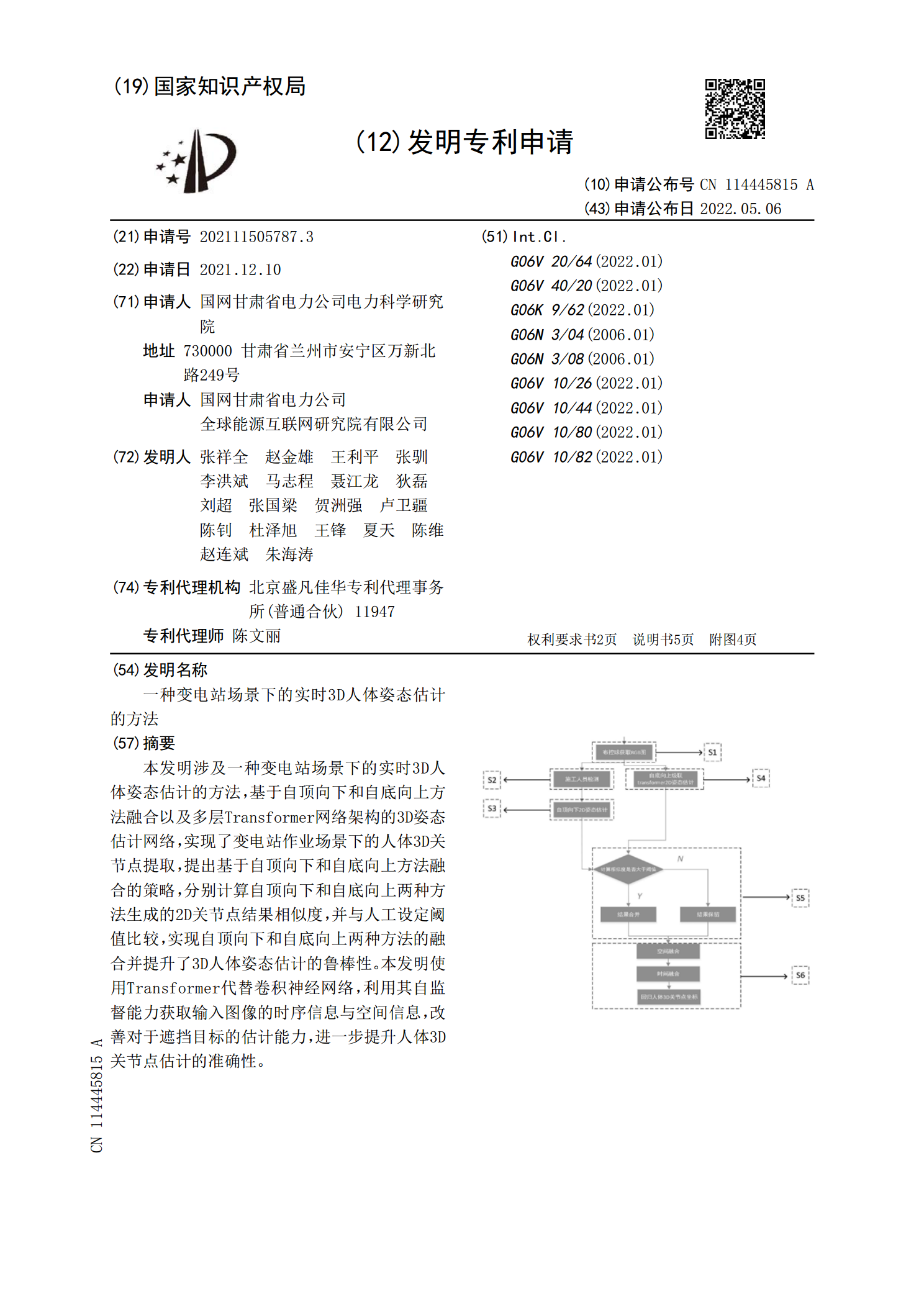
本发明涉及一种变电站场景下的实时3D人体姿态估计的方法,基于自顶向下和自底向上方法融合以及多层Transformer网络架构的3D姿态估计网络,实现了变电站作业场景下的人体3D关节点提取,提出基于自顶向下和自底向上方法融合的策略,分别计算自顶向下和自底向上两种方法生成的2D关节点结果相似度,并与人工设定阈值比较,实现自顶向下和自底向上两种方法的融合并提升了3D人体姿态估计的鲁棒性。本发明使用Transformer代替卷积神经网络,利用其自监督能力获取输入图像的时序信息与空间信息,改善对于遮挡目标的估计能力
一种人体姿态估计方法及系统.pdf
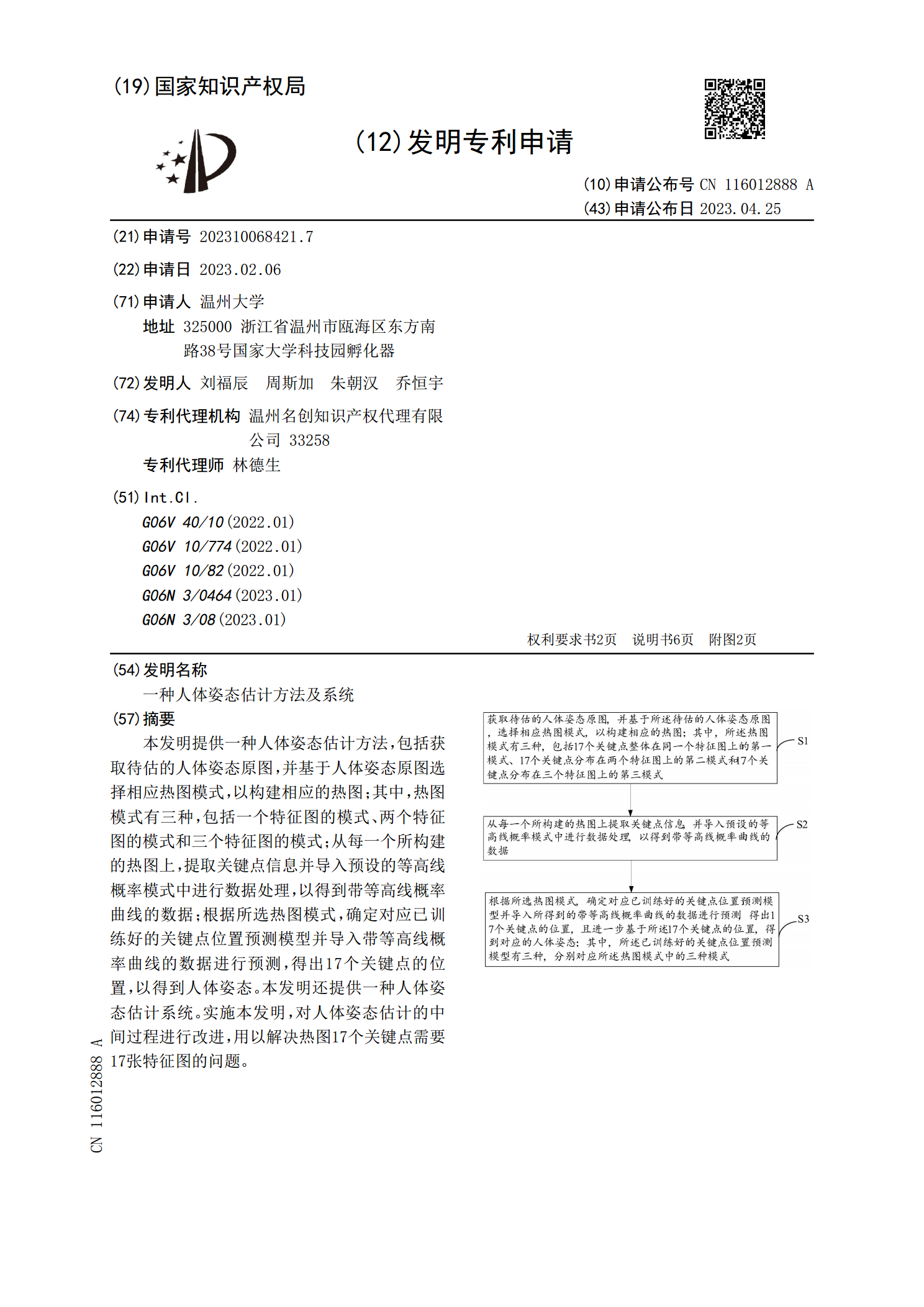
本发明提供一种人体姿态估计方法,包括获取待估的人体姿态原图,并基于人体姿态原图选择相应热图模式,以构建相应的热图;其中,热图模式有三种,包括一个特征图的模式、两个特征图的模式和三个特征图的模式;从每一个所构建的热图上,提取关键点信息并导入预设的等高线概率模式中进行数据处理,以得到带等高线概率曲线的数据;根据所选热图模式,确定对应已训练好的关键点位置预测模型并导入带等高线概率曲线的数据进行预测,得出17个关键点的位置,以得到人体姿态。本发明还提供一种人体姿态估计系统。实施本发明,对人体姿态估计的中间过程进行
一种人体姿态估计方法及装置.pdf
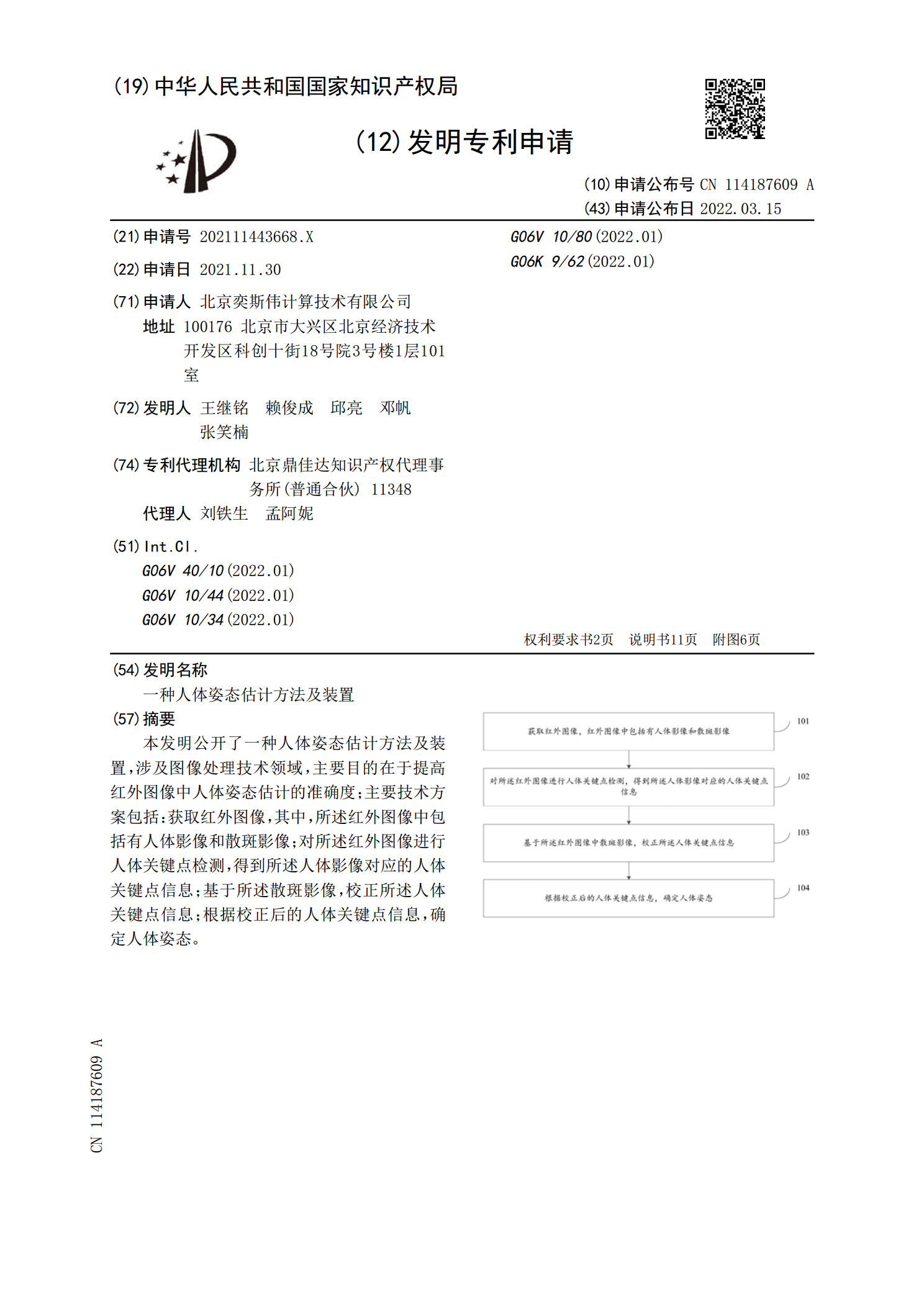
本发明公开了一种人体姿态估计方法及装置,涉及图像处理技术领域,主要目的在于提高红外图像中人体姿态估计的准确度;主要技术方案包括:获取红外图像,其中,所述红外图像中包括有人体影像和散斑影像;对所述红外图像进行人体关键点检测,得到所述人体影像对应的人体关键点信息;基于所述散斑影像,校正所述人体关键点信息;根据校正后的人体关键点信息,确定人体姿态。