
一种变电站场景下的实时3D人体姿态估计的方法.pdf

是你****元呀

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种变电站场景下的实时3D人体姿态估计的方法.pdf
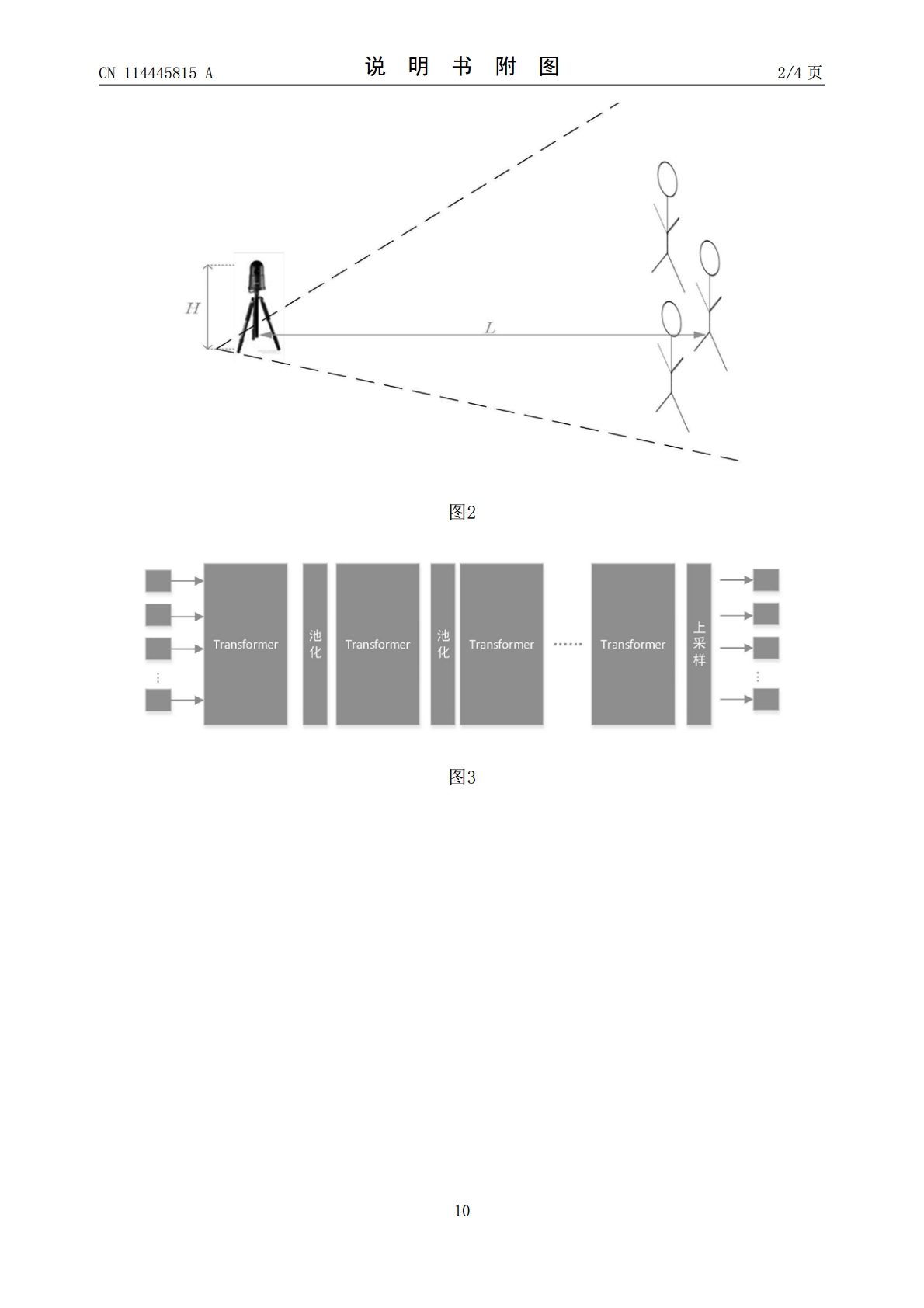
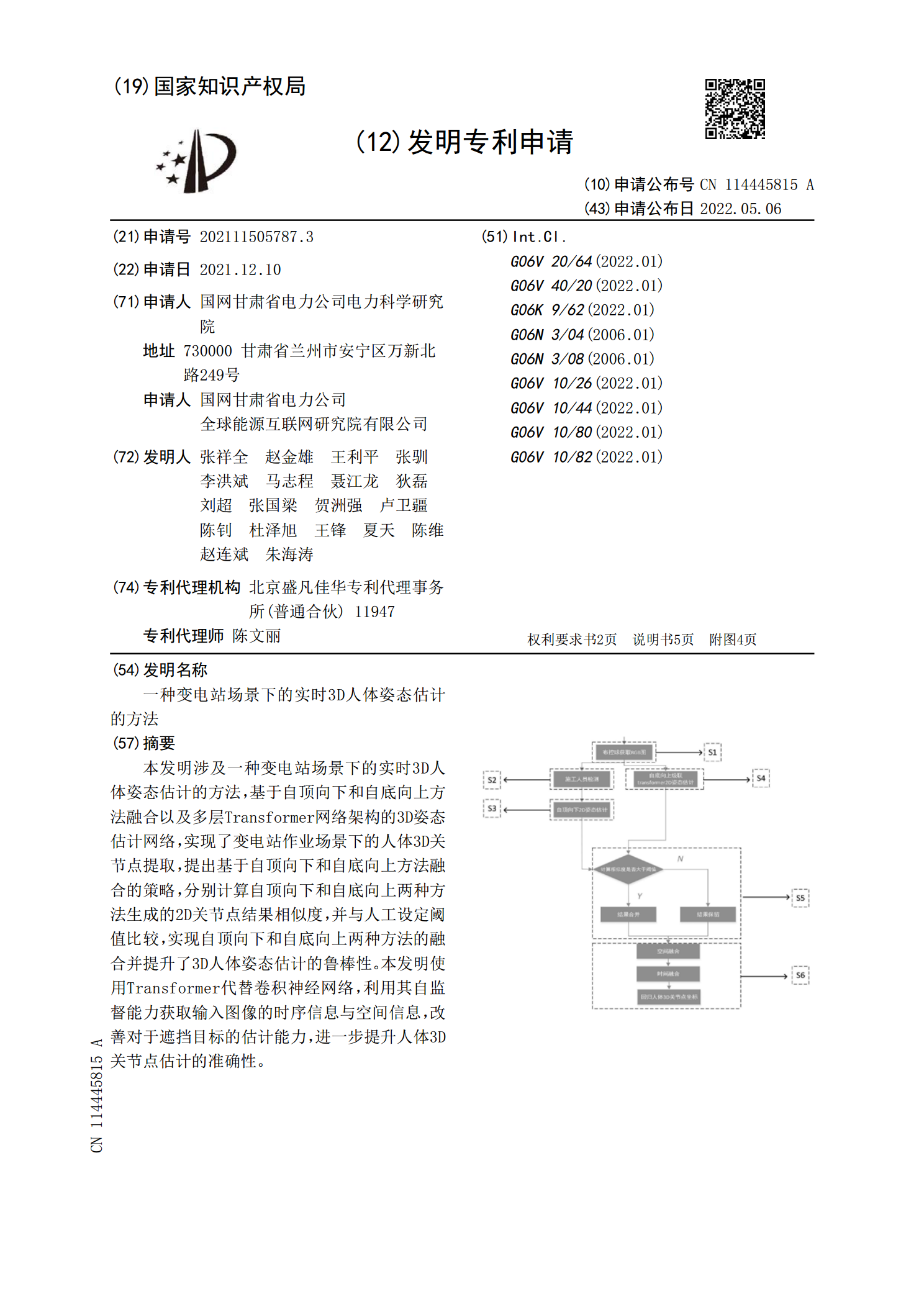
本发明涉及一种变电站场景下的实时3D人体姿态估计的方法,基于自顶向下和自底向上方法融合以及多层Transformer网络架构的3D姿态估计网络,实现了变电站作业场景下的人体3D关节点提取,提出基于自顶向下和自底向上方法融合的策略,分别计算自顶向下和自底向上两种方法生成的2D关节点结果相似度,并与人工设定阈值比较,实现自顶向下和自底向上两种方法的融合并提升了3D人体姿态估计的鲁棒性。本发明使用Transformer代替卷积神经网络,利用其自监督能力获取输入图像的时序信息与空间信息,改善对于遮挡目标的估计能力

一种轻量级的实时人体姿态估计方法.pdf
本发明公开了一种轻量级的实时人体姿态估计方法,加载训练数据COCO或者MPII等数据集,通过数据增强方法生成训练数据Heatmap特征图和关键点;分别训练Heatmap预测模块和回归预测模块;裁剪模型结构,去掉Heatmap预测模块,保留回归预测模块,直接预测人体关键点。本发明针对传统模型结构复杂,难以满足实时处理的问题,采用轻量级网络MobilenetV2重构Hourglass网络模型作为主干网络进行预测,可在嵌入式设备上进行实时推理;增加回归模块预测方法,直接预测人体关键点,有效降低CPU和内存占用,

复杂场景下的人体姿态估计与动作识别研究.docx
复杂场景下的人体姿态估计与动作识别研究复杂场景下的人体姿态估计与动作识别研究摘要:随着计算机视觉和模式识别技术的快速发展,人体姿态估计与动作识别在许多领域中变得越来越重要。然而,由于复杂场景的挑战,如遮挡、光照变化和背景噪声,传统的方法在这些情况下往往无法准确地估计人体的姿态和识别动作。为了解决这些问题,本文将综述当前在复杂场景下人体姿态估计和动作识别方面取得的最新研究进展,并讨论其中的挑战和未来的发展方向。1.引言人体姿态估计和动作识别的研究在计算机视觉和机器学习领域具有广泛的应用。它们在视频监控、人机
一种3D人体姿态估计模型训练方法.pdf
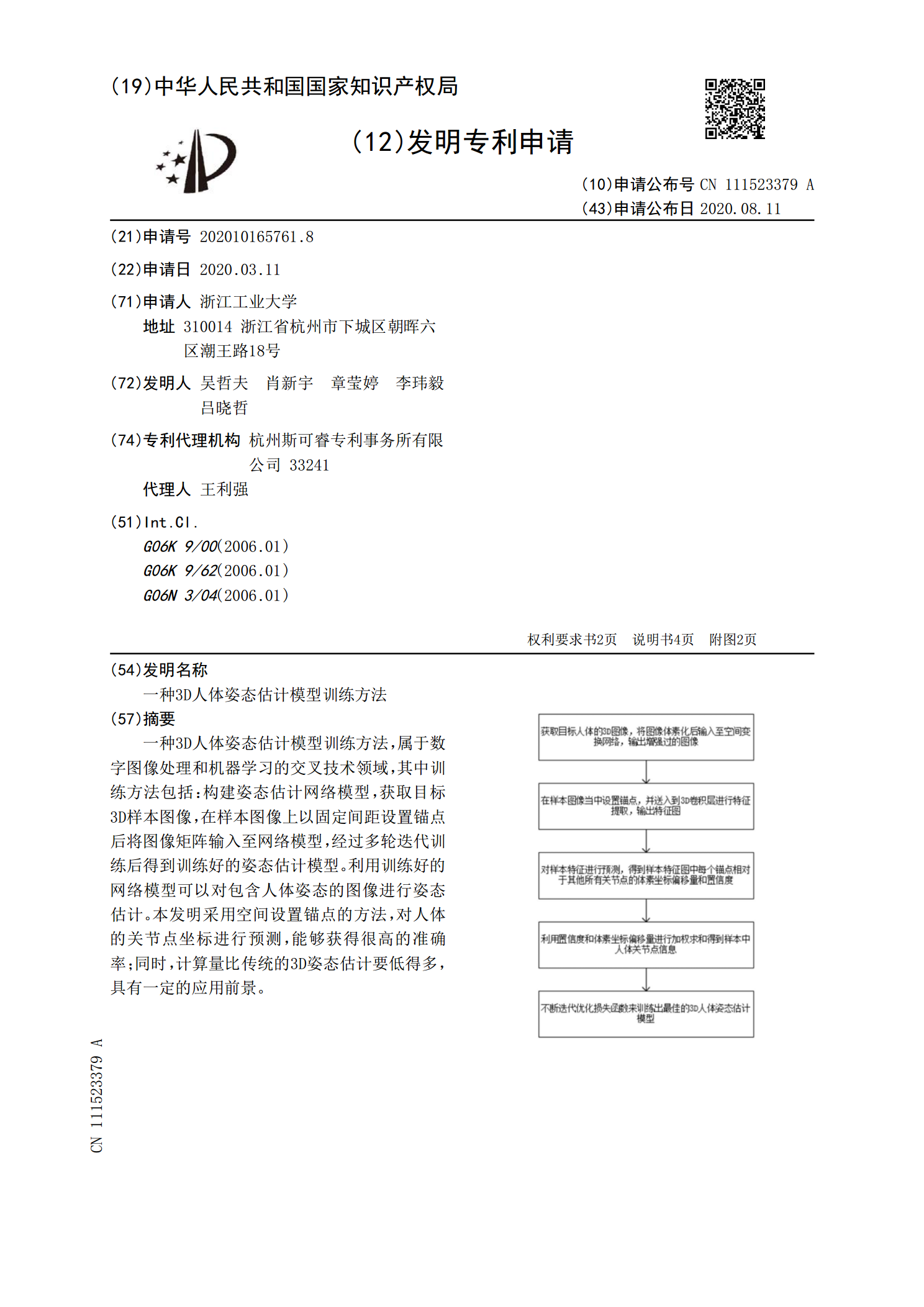
一种3D人体姿态估计模型训练方法,属于数字图像处理和机器学习的交叉技术领域,其中训练方法包括:构建姿态估计网络模型,获取目标3D样本图像,在样本图像上以固定间距设置锚点后将图像矩阵输入至网络模型,经过多轮迭代训练后得到训练好的姿态估计模型。利用训练好的网络模型可以对包含人体姿态的图像进行姿态估计。本发明采用空间设置锚点的方法,对人体的关节点坐标进行预测,能够获得很高的准确率;同时,计算量比传统的3D姿态估计要低得多,具有一定的应用前景。
一种实时轻量级2D人体姿态估计方法.pdf
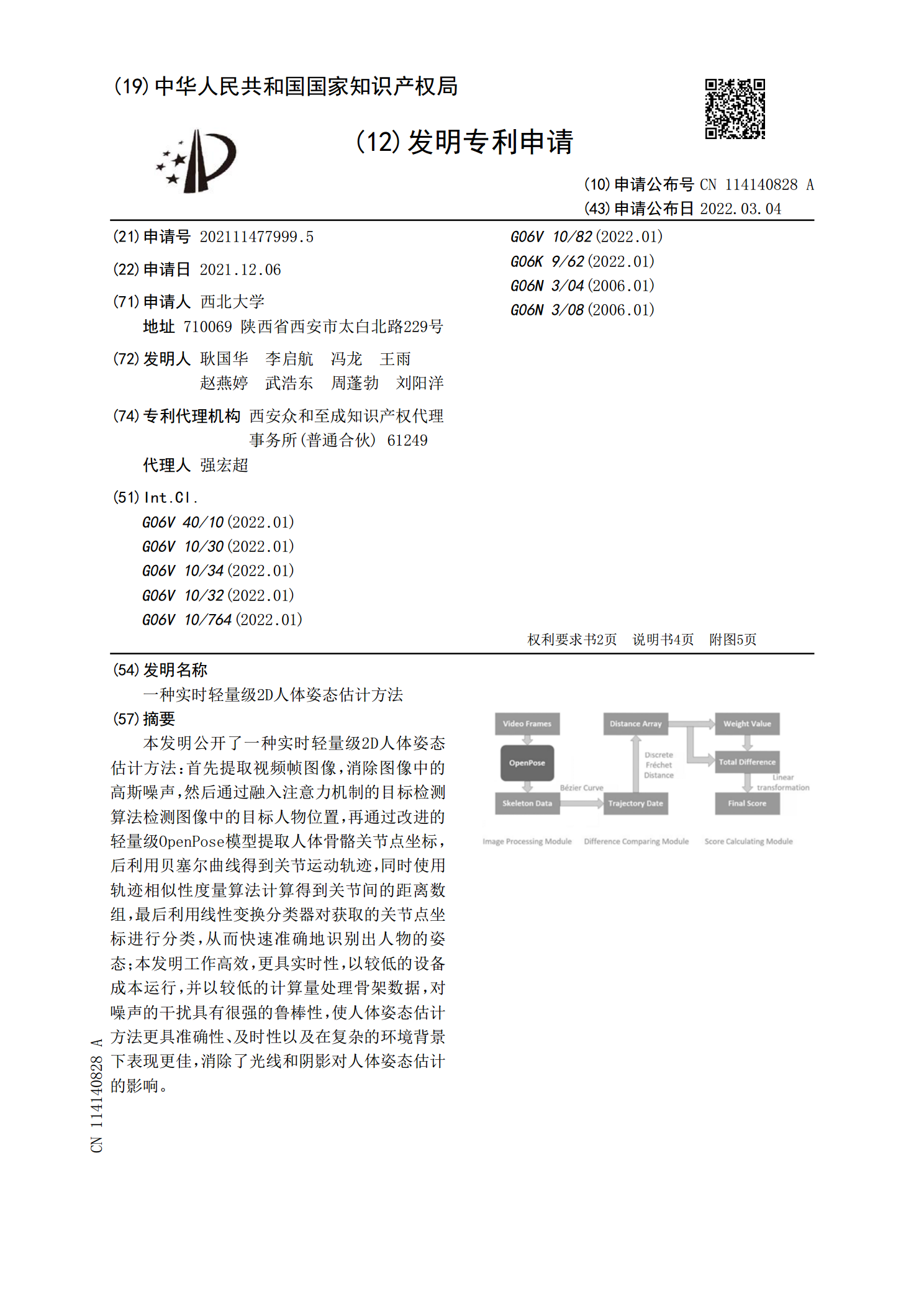
本发明公开了一种实时轻量级2D人体姿态估计方法:首先提取视频帧图像,消除图像中的高斯噪声,然后通过融入注意力机制的目标检测算法检测图像中的目标人物位置,再通过改进的轻量级OpenPose模型提取人体骨骼关节点坐标,后利用贝塞尔曲线得到关节运动轨迹,同时使用轨迹相似性度量算法计算得到关节间的距离数组,最后利用线性变换分类器对获取的关节点坐标进行分类,从而快速准确地识别出人物的姿态;本发明工作高效,更具实时性,以较低的设备成本运行,并以较低的计算量处理骨架数据,对噪声的干扰具有很强的鲁棒性,使人体姿态估计方法