
一种基于直升机机载激光雷达的地物语义分割方法.pdf

书錦****by

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于直升机机载激光雷达的地物语义分割方法.pdf
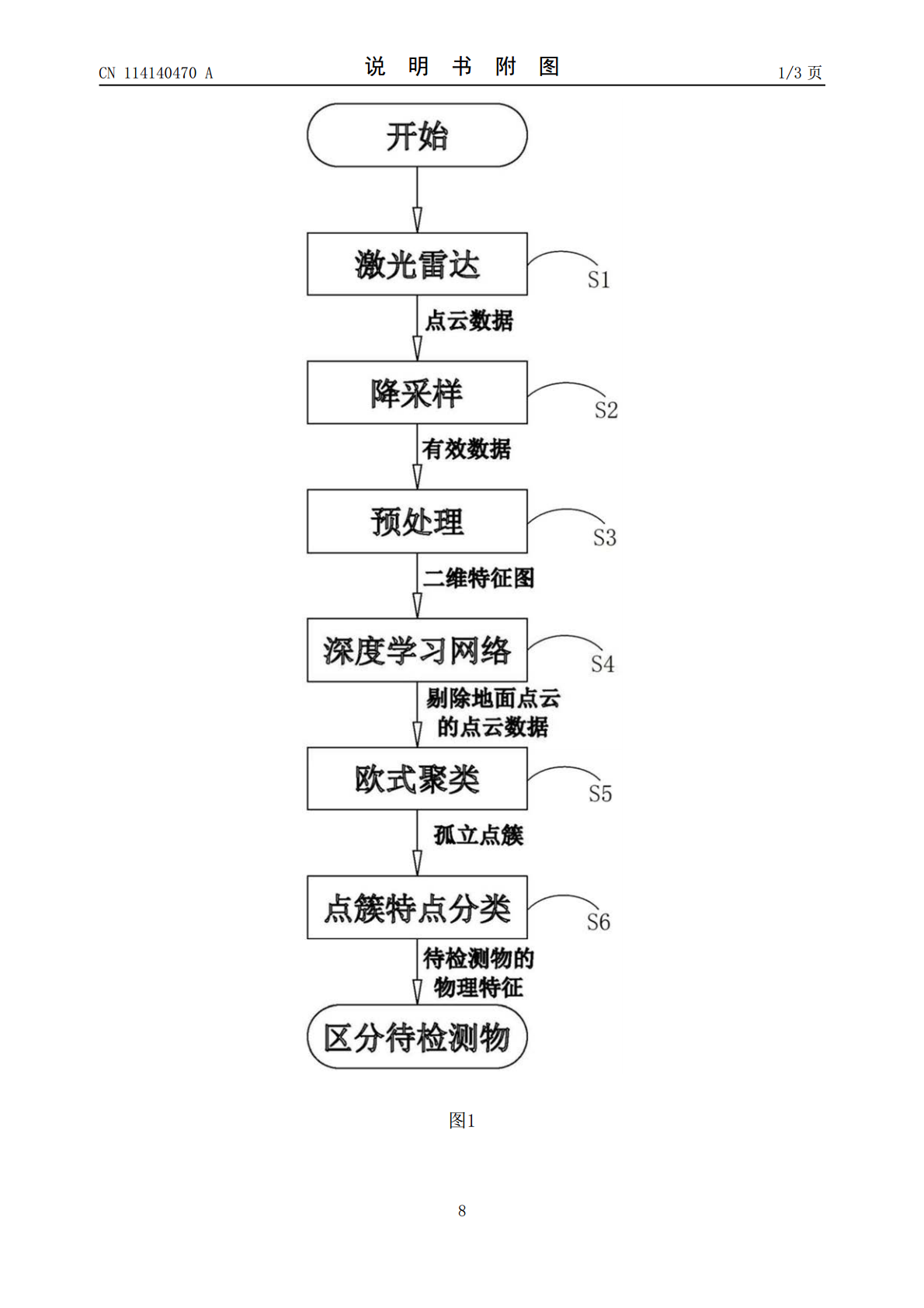
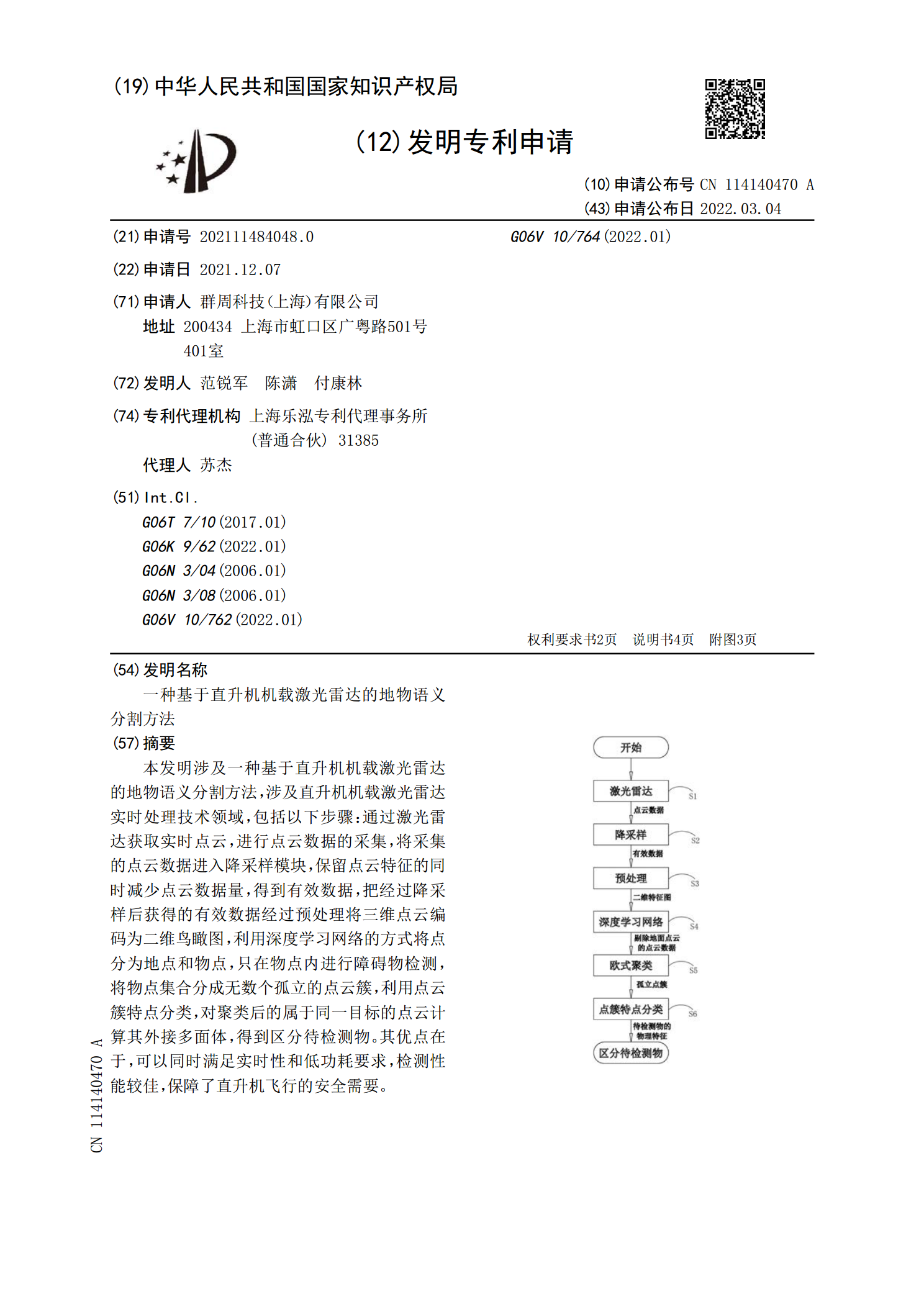
本发明涉及一种基于直升机机载激光雷达的地物语义分割方法,涉及直升机机载激光雷达实时处理技术领域,包括以下步骤:通过激光雷达获取实时点云,进行点云数据的采集,将采集的点云数据进入降采样模块,保留点云特征的同时减少点云数据量,得到有效数据,把经过降采样后获得的有效数据经过预处理将三维点云编码为二维鸟瞰图,利用深度学习网络的方式将点分为地点和物点,只在物点内进行障碍物检测,将物点集合分成无数个孤立的点云簇,利用点云簇特点分类,对聚类后的属于同一目标的点云计算其外接多面体,得到区分待检测物。其优点在于,可以同时满

一种基于直升机机载激光雷达的地面目标语义分割方法.pdf
本发明涉及一种基于直升机机载激光雷达的地面目标语义分割方法,涉及直升机机载激光雷达实时处理技术领域,包括以下步骤:通过激光雷达获取实时点云,进行点云数据的采集;将采集的点云数据进入降采样模块,保留点云特征的同时减少点云数据量,得到有效数据;把经过降采样后获得的有效数据经过预处理变成深度学习网络的输入张量;利用深度学习网络的方式将点云分为各个物体的点云簇;通过KNN推测原点云每一个点的分类情况,输出点云分割结果。其优点在于,可以同时满足实时性和低功耗要求,检测性能较佳,保障了直升机飞行的安全需要。

基于语义推理的城区机载LiDAR分割点云分类.docx
基于语义推理的城区机载LiDAR分割点云分类摘要近年来,随着无人驾驶和智能城市的发展,城市的三维重建和分割越来越受到重视。在这个过程中,机载LiDAR扫描技术在高效获取城市环境中的点云数据方面具有很大的优势。同时,基于语义推理的点云分类方法也成为了当前研究的热点。本文基于机载LiDAR采集的城市环境点云数据,提出了一种基于语义推理的点云分割与分类方法,可以有效地提高城市环境点云数据的分类精度和处理效率。关键词:语义推理,机载LiDAR,点云分类,城市环境引言城市环境中的点云数据包含了很多重要的信息,例如建
一种基于实例分割的语义SLAM方法.pdf
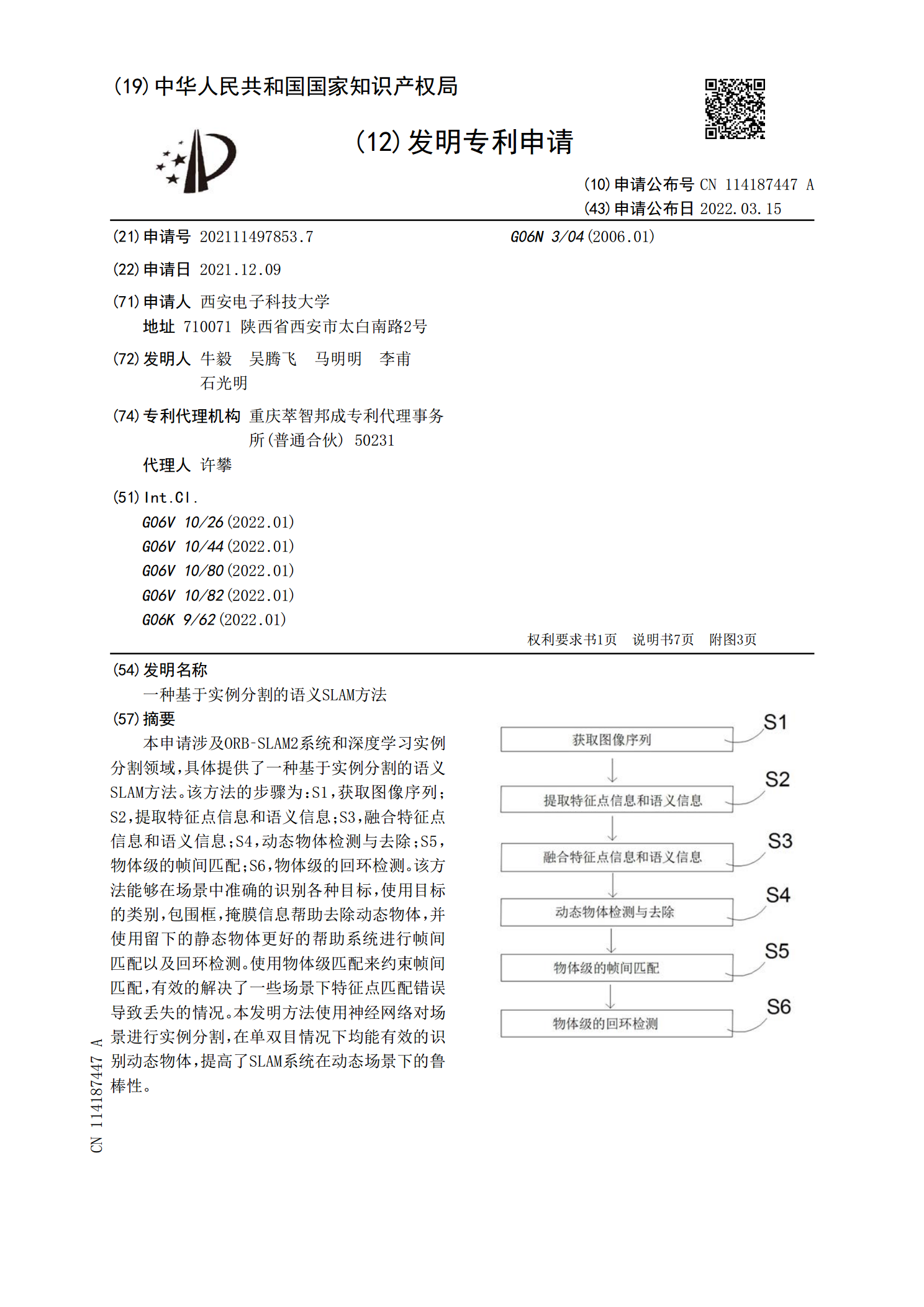
本申请涉及ORB‑SLAM2系统和深度学习实例分割领域,具体提供了一种基于实例分割的语义SLAM方法。该方法的步骤为:S1,获取图像序列;S2,提取特征点信息和语义信息;S3,融合特征点信息和语义信息;S4,动态物体检测与去除;S5,物体级的帧间匹配;S6,物体级的回环检测。该方法能够在场景中准确的识别各种目标,使用目标的类别,包围框,掩膜信息帮助去除动态物体,并使用留下的静态物体更好的帮助系统进行帧间匹配以及回环检测。使用物体级匹配来约束帧间匹配,有效的解决了一些场景下特征点匹配错误导致丢失的情况。本发

一种基于分割网络优化的图像语义分割方法及系统.pdf
本发明实施例提供一种基于分割网络优化的图像语义分割方法及系统,其中方法包括:确定待语义分割的图像;将所述图像输入至分割网络优化模型中,得到所述分割网络优化模型输出的图像语义分割结果;其中,所述分割网络优化模型是基于样本图像以及对应的像素类别标注进行多阶段损失函数训练后得到的,所述像素类别标注是预先确定的。本发明解决了现有传统的语义分割模型的训练方法不能很好地勾勒出分割部分的边界,对超声图像进行分割时经常出现不圆滑的边界和锯齿状边界的现象问题。