
一种对象识别方法、装置及存储介质.pdf

一条****发啊

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种对象识别方法、装置及存储介质.pdf
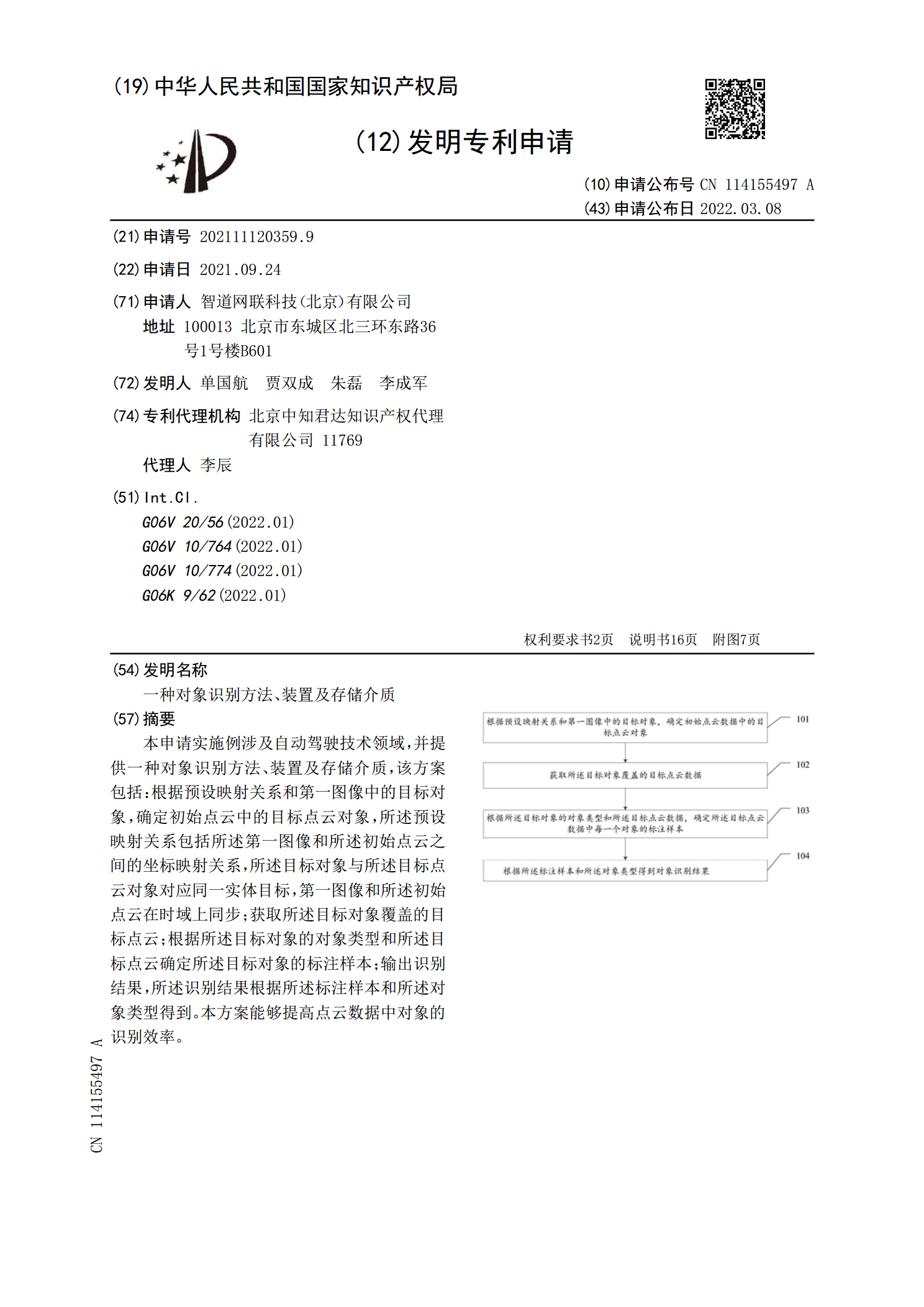
本申请实施例涉及自动驾驶技术领域,并提供一种对象识别方法、装置及存储介质,该方案包括:根据预设映射关系和第一图像中的目标对象,确定初始点云中的目标点云对象,所述预设映射关系包括所述第一图像和所述初始点云之间的坐标映射关系,所述目标对象与所述目标点云对象对应同一实体目标,第一图像和所述初始点云在时域上同步;获取所述目标对象覆盖的目标点云;根据所述目标对象的对象类型和所述目标点云确定所述目标对象的标注样本;输出识别结果,所述识别结果根据所述标注样本和所述对象类型得到。本方案能够提高点云数据中对象的识别效率。
一种对象识别方法及装置、设备、存储介质.pdf
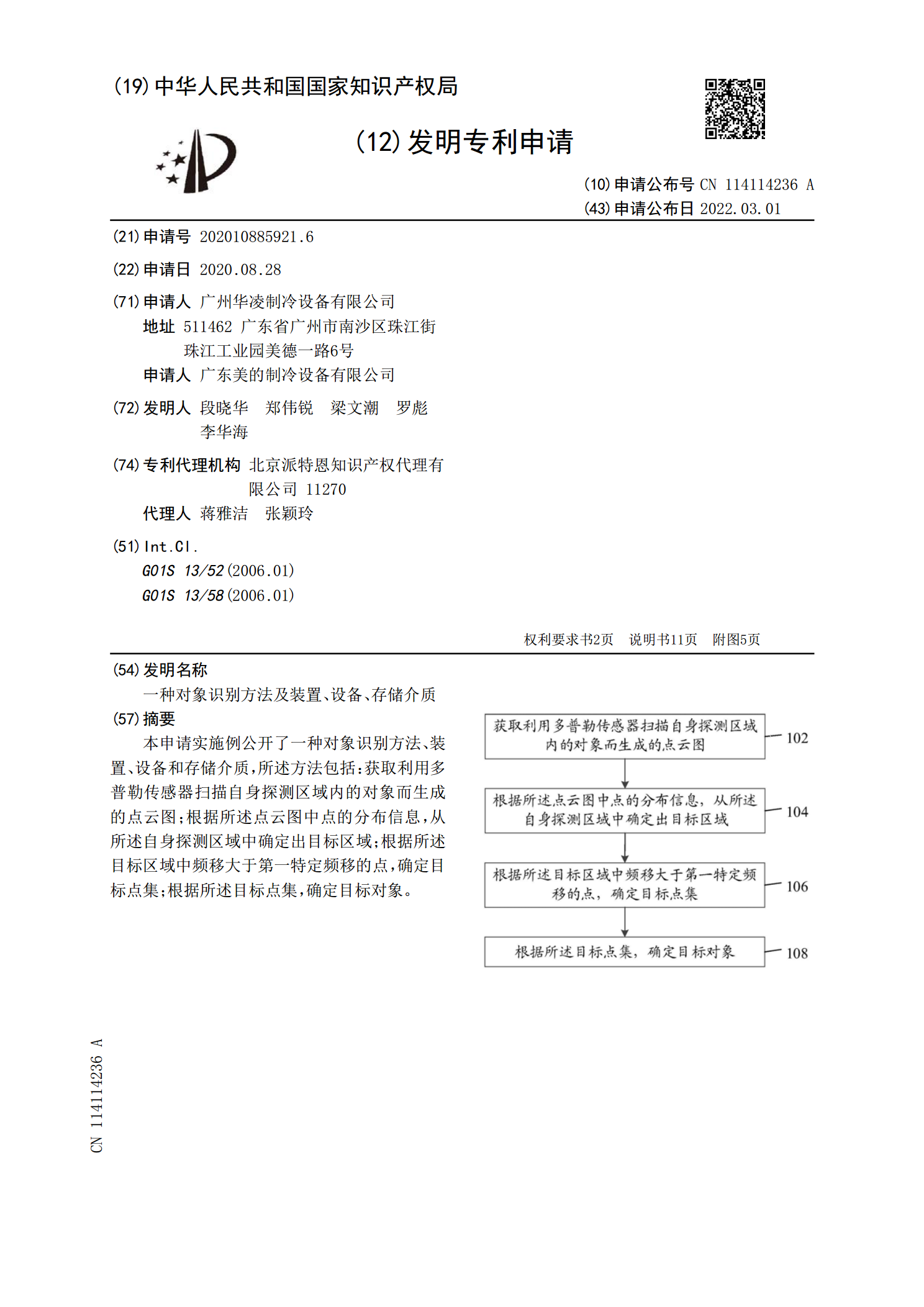
本申请实施例公开了一种对象识别方法、装置、设备和存储介质,所述方法包括:获取利用多普勒传感器扫描自身探测区域内的对象而生成的点云图;根据所述点云图中点的分布信息,从所述自身探测区域中确定出目标区域;根据所述目标区域中频移大于第一特定频移的点,确定目标点集;根据所述目标点集,确定目标对象。

对象识别方法、装置、设备及存储介质.pdf
本申请实施例公开了一种对象识别方法、装置、设备及存储介质,其中,所述方法包括:获取画面包括行驶车辆的交通图像;在所述交通图像中,确定所述车辆的车辆检测框和位于所述车辆内部的车内人员的人脸检测框;基于所述人脸检测框和所述车辆检测框在所述交通图像中的第一位置关系,确定驾驶所述车辆的目标人员。
对象识别方法、装置、设备及存储介质.pdf
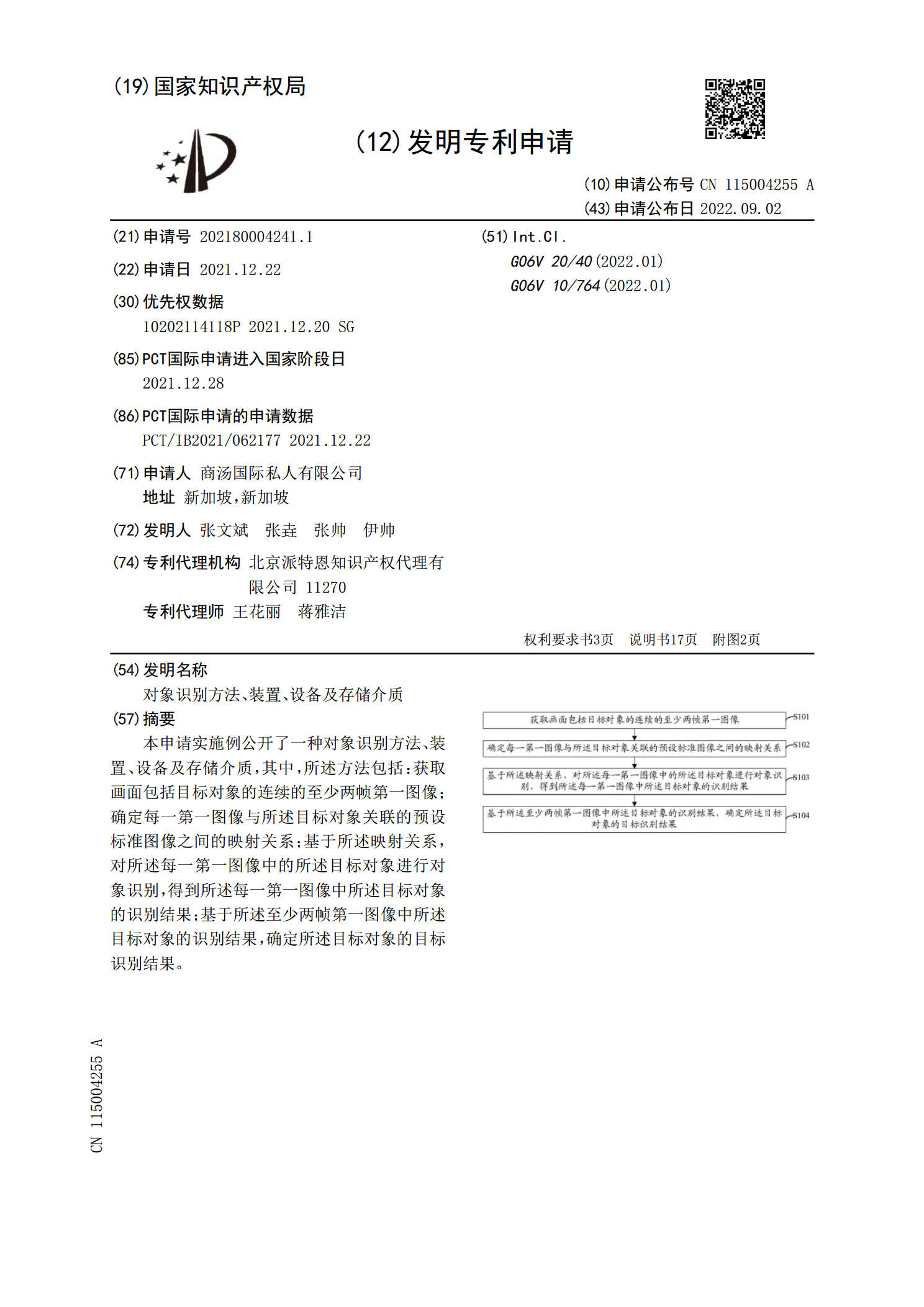
本申请实施例公开了一种对象识别方法、装置、设备及存储介质,其中,所述方法包括:获取画面包括目标对象的连续的至少两帧第一图像;确定每一第一图像与所述目标对象关联的预设标准图像之间的映射关系;基于所述映射关系,对所述每一第一图像中的所述目标对象进行对象识别,得到所述每一第一图像中所述目标对象的识别结果;基于所述至少两帧第一图像中所述目标对象的识别结果,确定所述目标对象的目标识别结果。
对象识别方法、装置、存储介质及服务器.pdf
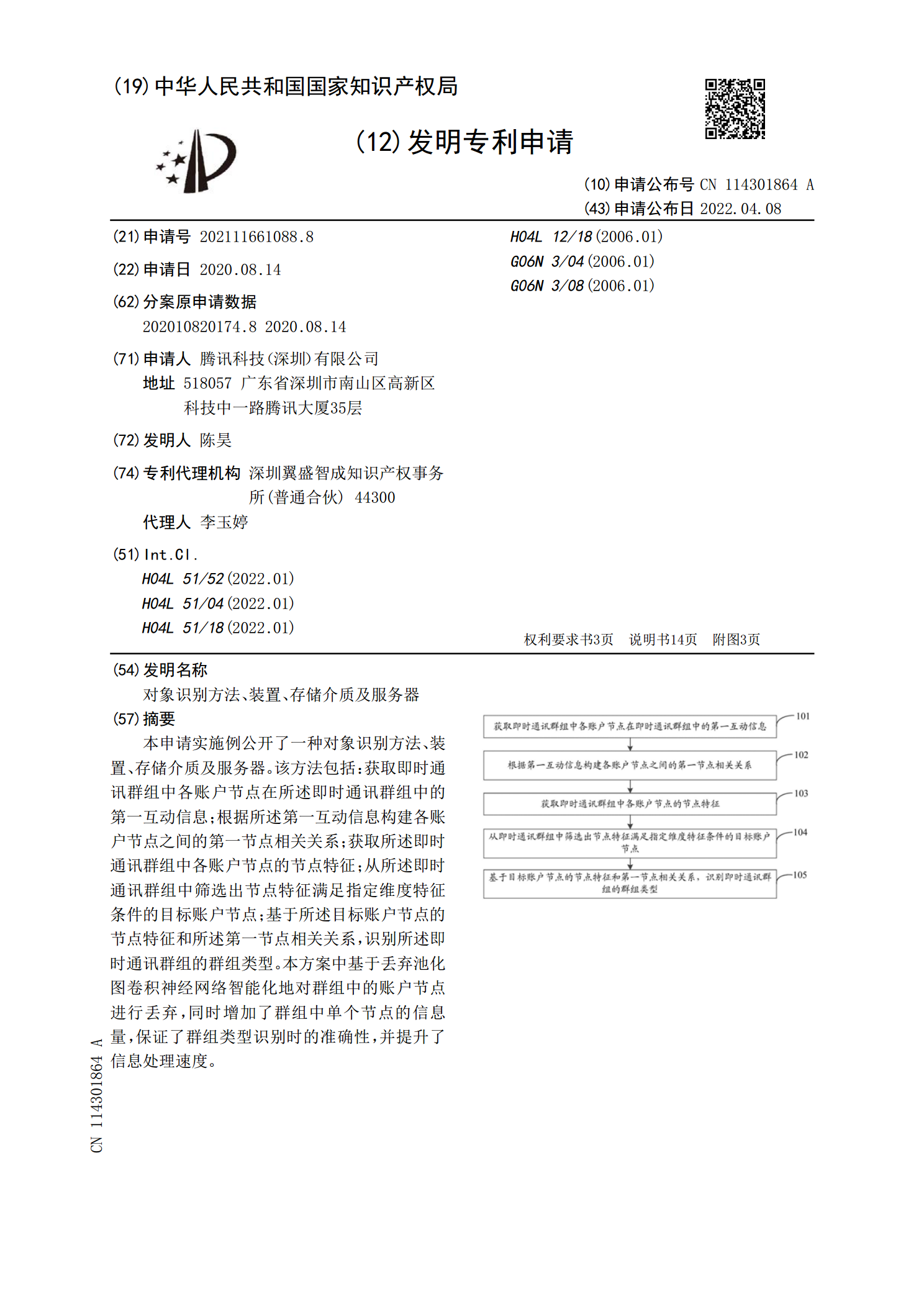
本申请实施例公开了一种对象识别方法、装置、存储介质及服务器。该方法包括:获取即时通讯群组中各账户节点在所述即时通讯群组中的第一互动信息;根据所述第一互动信息构建各账户节点之间的第一节点相关关系;获取所述即时通讯群组中各账户节点的节点特征;从所述即时通讯群组中筛选出节点特征满足指定维度特征条件的目标账户节点;基于所述目标账户节点的节点特征和所述第一节点相关关系,识别所述即时通讯群组的群组类型。本方案中基于丢弃池化图卷积神经网络智能化地对群组中的账户节点进行丢弃,同时增加了群组中单个节点的信息量,保证了群组类