
一种物体位姿检测方法及装置.pdf

宜然****找我

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种物体位姿检测方法及装置.pdf
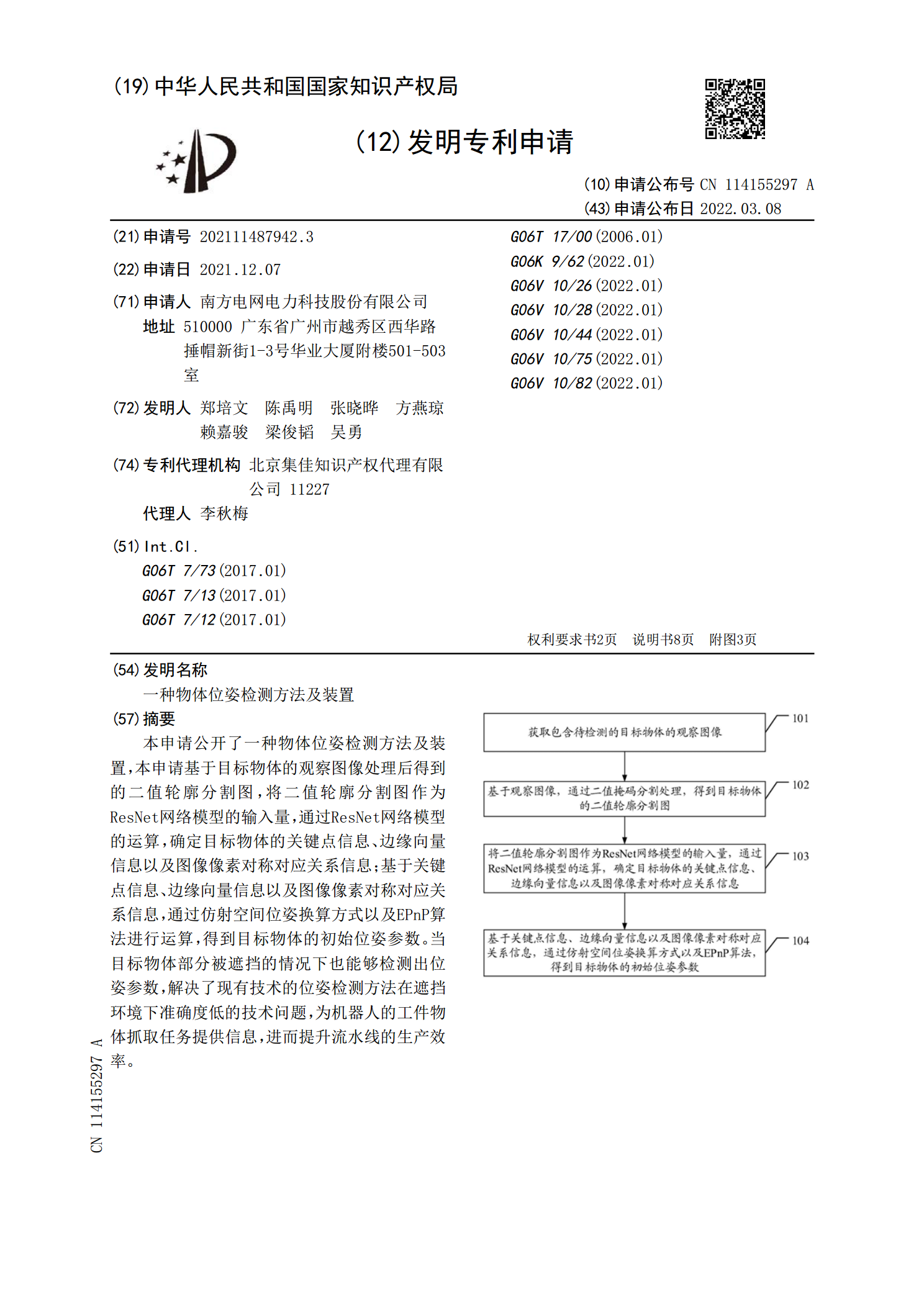
本申请公开了一种物体位姿检测方法及装置,本申请基于目标物体的观察图像处理后得到的二值轮廓分割图,将二值轮廓分割图作为ResNet网络模型的输入量,通过ResNet网络模型的运算,确定目标物体的关键点信息、边缘向量信息以及图像像素对称对应关系信息;基于关键点信息、边缘向量信息以及图像像素对称对应关系信息,通过仿射空间位姿换算方式以及EPnP算法进行运算,得到目标物体的初始位姿参数。当目标物体部分被遮挡的情况下也能够检测出位姿参数,解决了现有技术的位姿检测方法在遮挡环境下准确度低的技术问题,为机器人的工件物体
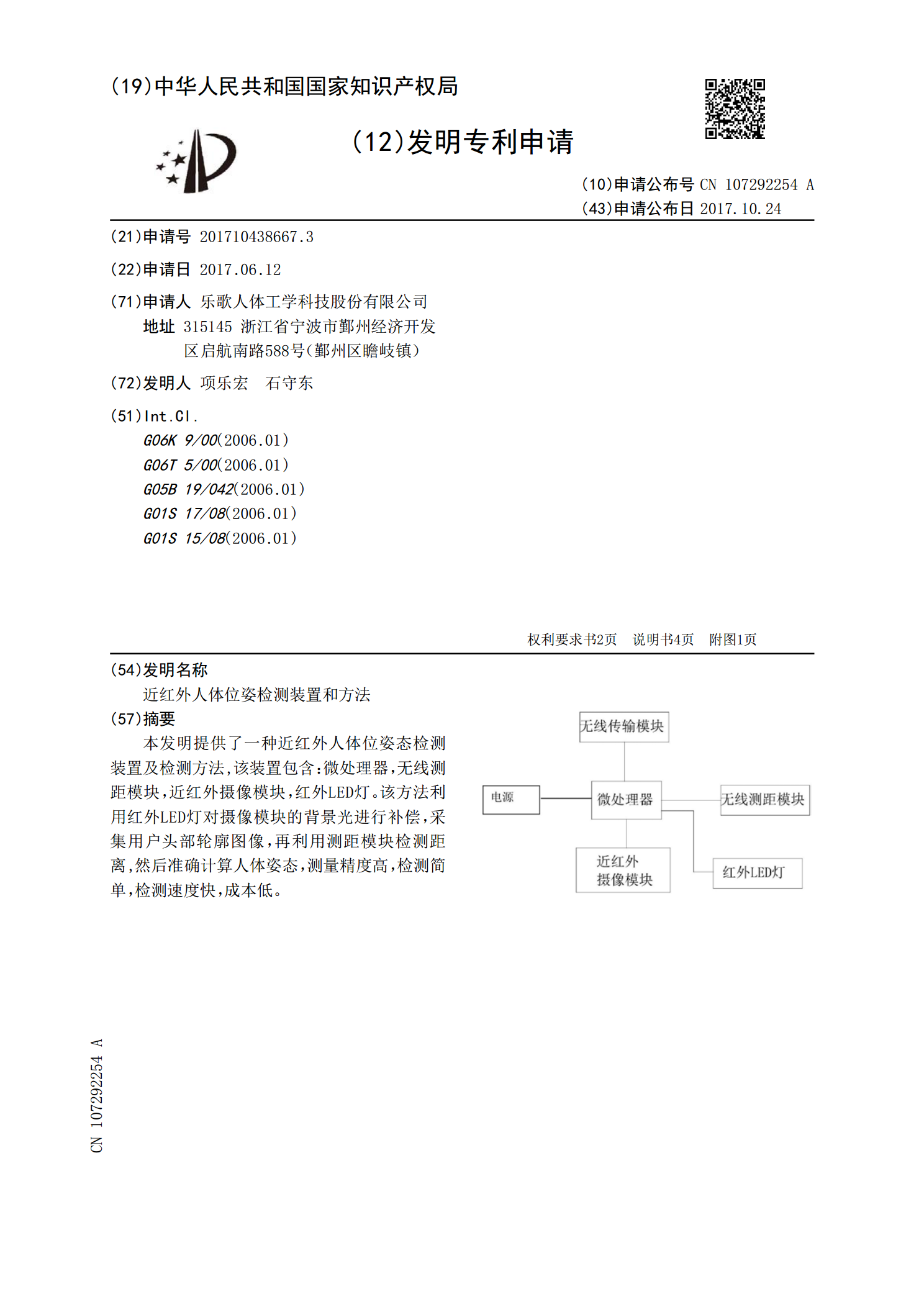
近红外人体位姿检测装置和方法.pdf
本发明提供了一种近红外人体位姿态检测装置及检测方法,该装置包含:微处理器,无线测距模块,近红外摄像模块,红外LED灯。该方法利用红外LED灯对摄像模块的背景光进行补偿,采集用户头部轮廓图像,再利用测距模块检测距离,然后准确计算人体姿态,测量精度高,检测简单,检测速度快,成本低。

车体位姿校正方法及装置.pdf
本发明公开了一种车体位姿校正方法及装置,涉及机电控制技术领域。其中的方法包括:将车体的左驱动轮与右驱动轮的速度比值确定为随车体旋转角、车体中心目标位置以及车体中心当前位置变化的函数,车体旋转角为车体目标前进方向的法线方向与车体当前前进方向之间的夹角;根据车体旋转角、车体中心目标位置以及车体中心当前位置的数值,确定车体的左驱动轮与右驱动轮的速度比值,并根据速度比值为车体的左驱动轮与右驱动轮设定旋转速度。从而提供了一种车体位姿校正方法,实现车体在旋转过程中同步校正车体位姿。
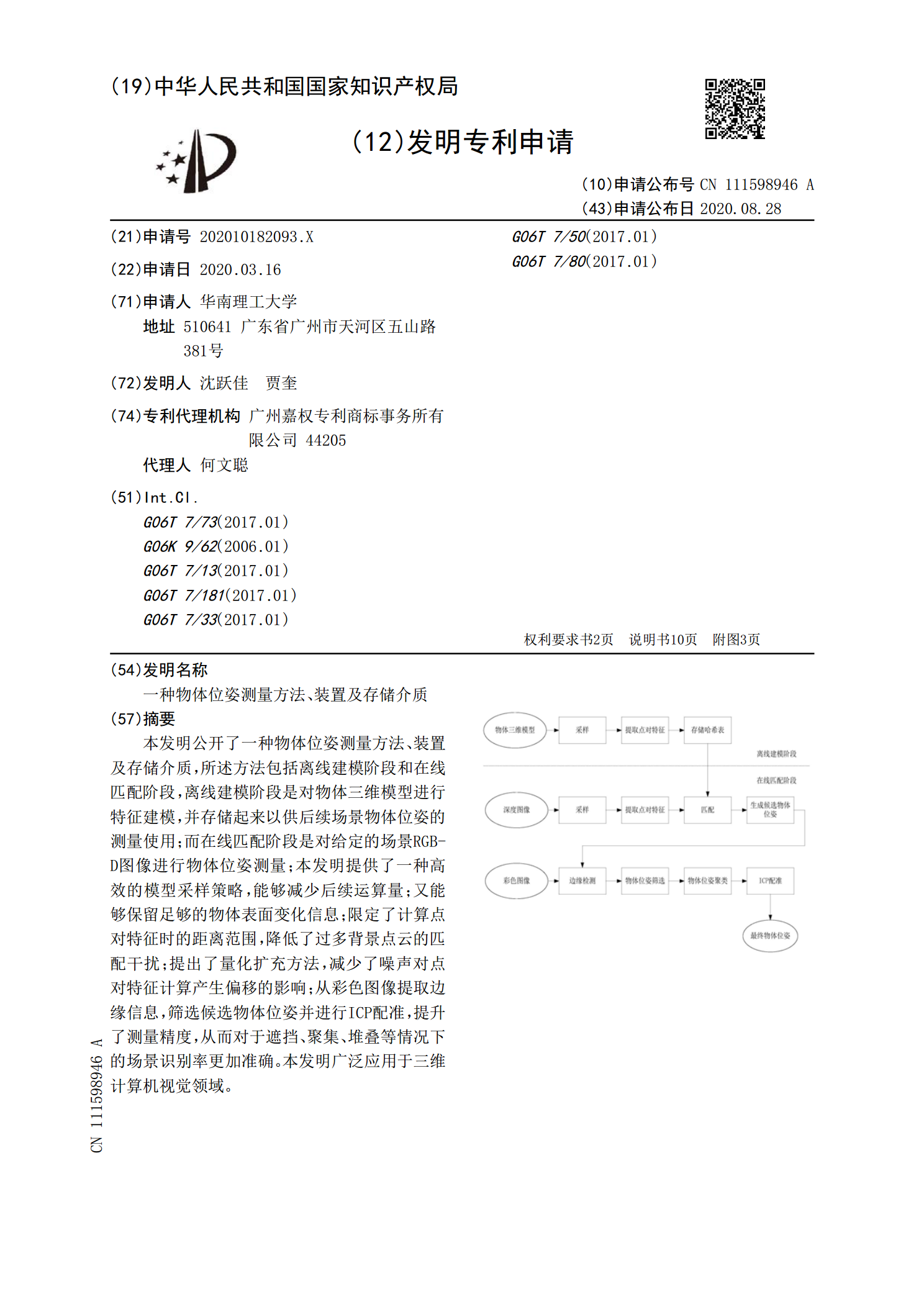
一种物体位姿测量方法、装置及存储介质.pdf
本发明公开了一种物体位姿测量方法、装置及存储介质,所述方法包括离线建模阶段和在线匹配阶段,离线建模阶段是对物体三维模型进行特征建模,并存储起来以供后续场景物体位姿的测量使用;而在线匹配阶段是对给定的场景RGB‑D图像进行物体位姿测量;本发明提供了一种高效的模型采样策略,能够减少后续运算量;又能够保留足够的物体表面变化信息;限定了计算点对特征时的距离范围,降低了过多背景点云的匹配干扰;提出了量化扩充方法,减少了噪声对点对特征计算产生偏移的影响;从彩色图像提取边缘信息,筛选候选物体位姿并进行ICP配准,提升了

一种方便调整轴体位姿的装置.pdf
本发明涉及一种方便调整轴体位姿的装置,在对机床进行调试或者维修的时候,需对其轴体进行定期更换,而在这个过程中则涉及到如何把握精准度的问题,因为重新更换的轴体和将被更换的旧机轴,其有不同的尺寸偏差。因此,在完成对轴体的更换之后,我们要对轴体的位置重新进行设置。我们要花大量的时间完成调试工作。为使调试工作相对简单,有必要在标准机体与待调试机体之间安装一个复式偏心轮,其中复式偏心轮有两个互相紧挨着的偏心套管,且可以来回旋转,使调试工作变得更加省时,更加精准。本发明装置有利于把握轴体的位置和方向,作出