
摄像头透镜多轴斜率控制装置及其方法.pdf

俊凤****bb

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
摄像头透镜多轴斜率控制装置及其方法.pdf
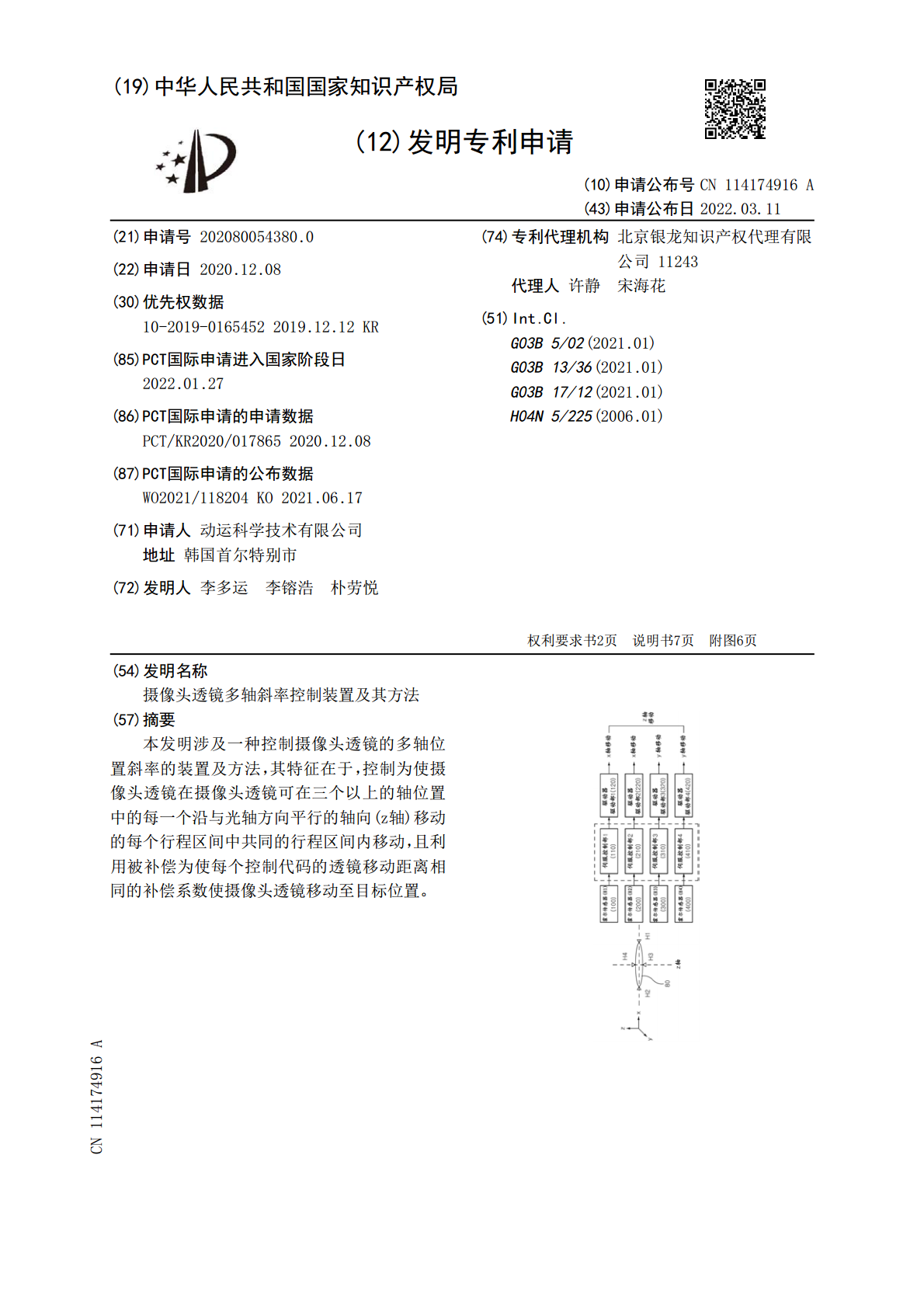
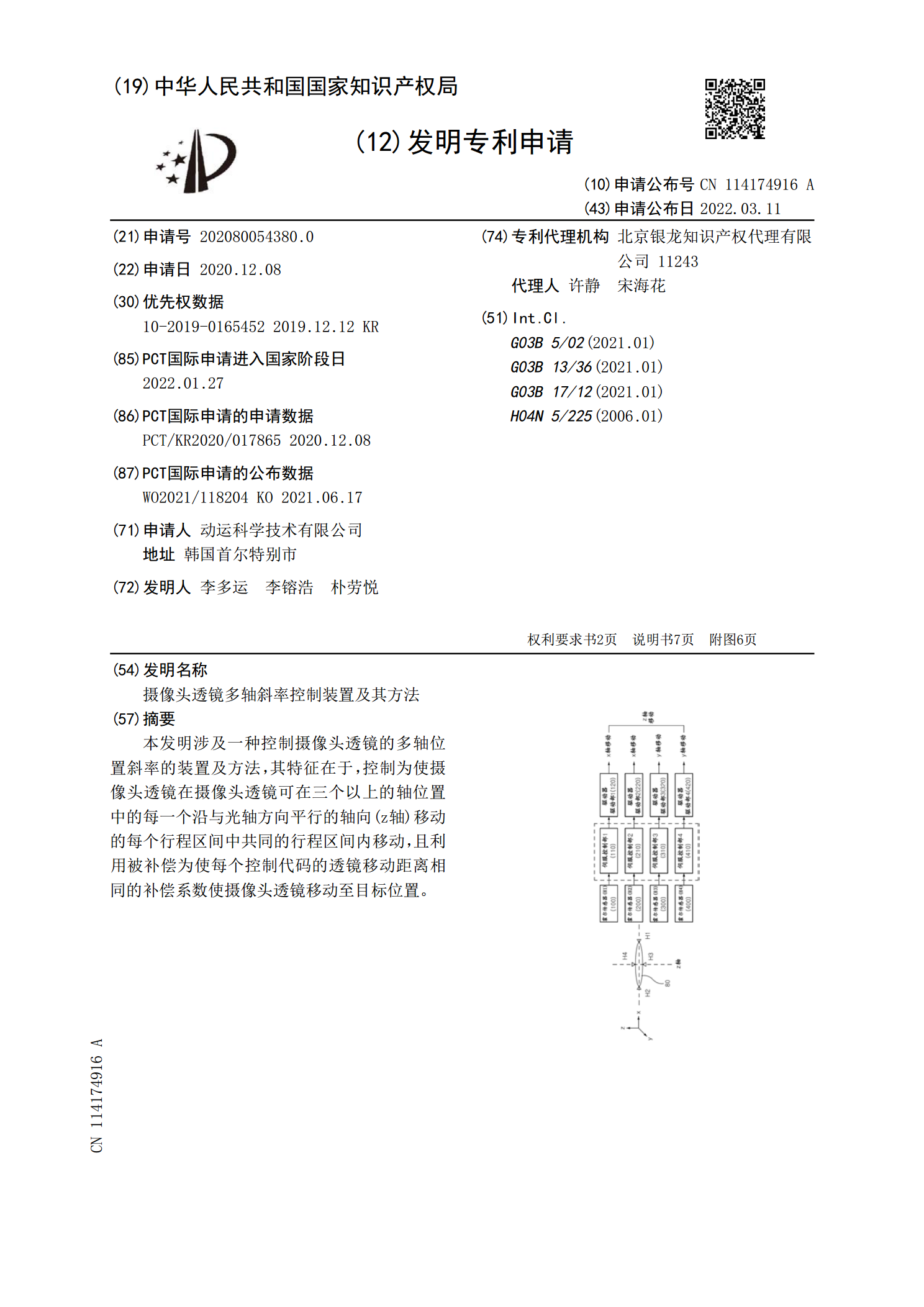
本发明涉及一种控制摄像头透镜的多轴位置斜率的装置及方法,其特征在于,控制为使摄像头透镜在摄像头透镜可在三个以上的轴位置中的每一个沿与光轴方向平行的轴向(z轴)移动的每个行程区间中共同的行程区间内移动,且利用被补偿为使每个控制代码的透镜移动距离相同的补偿系数使摄像头透镜移动至目标位置。
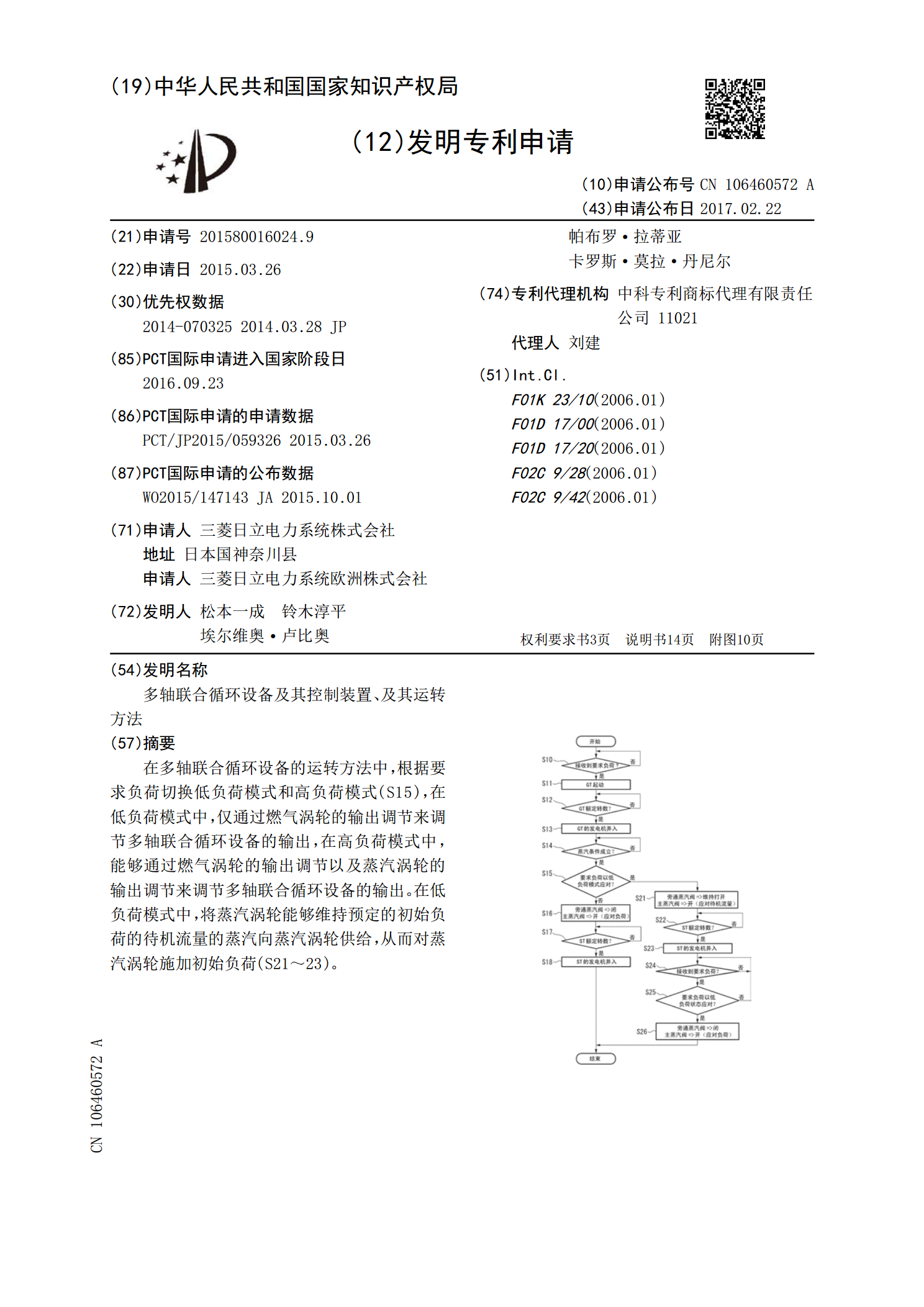
多轴联合循环设备及其控制装置、及其运转方法.pdf
在多轴联合循环设备的运转方法中,根据要求负荷切换低负荷模式和高负荷模式(S15),在低负荷模式中,仅通过燃气涡轮的输出调节来调节多轴联合循环设备的输出,在高负荷模式中,能够通过燃气涡轮的输出调节以及蒸汽涡轮的输出调节来调节多轴联合循环设备的输出。在低负荷模式中,将蒸汽涡轮能够维持预定的初始负荷的待机流量的蒸汽向蒸汽涡轮供给,从而对蒸汽涡轮施加初始负荷(S21~23)。

多轴插补控制方法与装置.pdf
本发明提供一种多轴插补控制方法及装置,该方法包括以下步骤:控制逻辑启动指令,计算参与插补轴的参数,并将这些参数传递给N个驱动器通讯模块;在插补运行过程中,虚拟主轴模块持续发出虚拟主轴,驱动参与插补各轴的电子凸轮模块运行;驱动器通讯模块接收到有效参数后,对通讯数据进行校验,校验通过后将参数发送到电子凸轮模块;电子凸轮模块根据虚拟主轴及输入参数进行周期计算,并在每个周期将周期脉冲量发送到电机控制模块;电机控制模块接收电子凸轮模块输出的周期脉冲,控制电机运行。本发明的多轴插补控制方法,只需要在控制器和电机驱动器
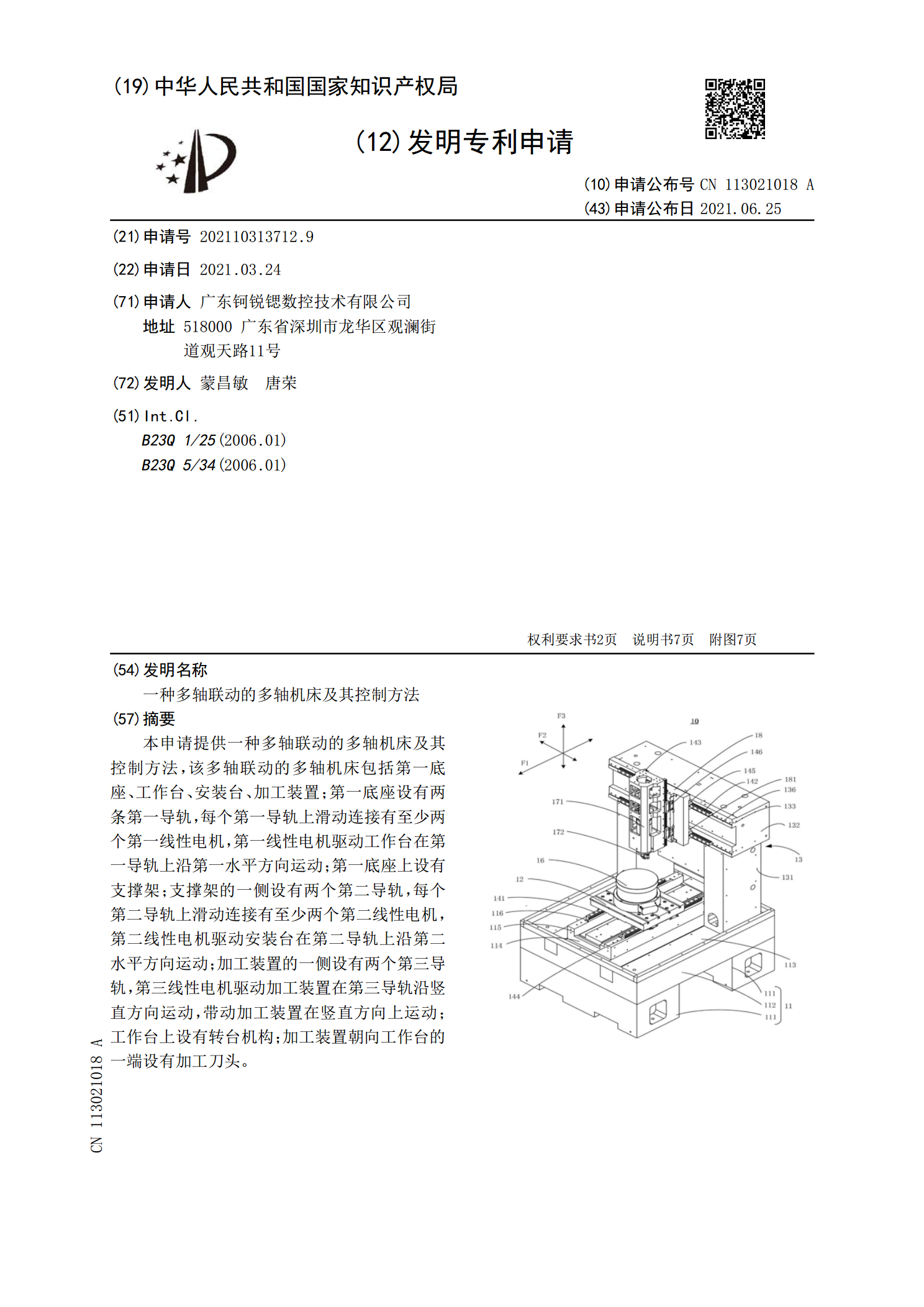
一种多轴联动的多轴机床及其控制方法.pdf
本申请提供一种多轴联动的多轴机床及其控制方法,该多轴联动的多轴机床包括第一底座、工作台、安装台、加工装置;第一底座设有两条第一导轨,每个第一导轨上滑动连接有至少两个第一线性电机,第一线性电机驱动工作台在第一导轨上沿第一水平方向运动;第一底座上设有支撑架;支撑架的一侧设有两个第二导轨,每个第二导轨上滑动连接有至少两个第二线性电机,第二线性电机驱动安装台在第二导轨上沿第二水平方向运动;加工装置的一侧设有两个第三导轨,第三线性电机驱动加工装置在第三导轨沿竖直方向运动,带动加工装置在竖直方向上运动;工作台上设有转

透镜镜筒及其控制方法、相机主体及其控制方法以及摄影装置及其控制方法.pdf
本发明提供一种能够容易且可靠地防止切换手动聚焦模式时的误操作的透镜镜筒及其控制方法、相机主体及其控制方法以及摄影装置及其控制方法。透镜镜筒主体(30)容纳包括聚焦透镜(95)的摄像光学系统(31)。聚焦操作环(32)以摄像光学系统(31)的光轴为中心与第1连结环(33)一体旋转。第2连结环(34)能够在与第1连结环(33)及凸轮环(35)卡合的卡合位置和均不与它们卡合的非卡合位置中移动。凸轮环(35)能够在以摄像光学系统(31)的光轴为中心进行限制的角度范围内旋转。切换操作环(36)能够在使第2连结环(3