
基于多智能体强化学习的效用感知的协作服务缓存方法.pdf

新月****姐a

1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多智能体强化学习的效用感知的协作服务缓存方法.pdf
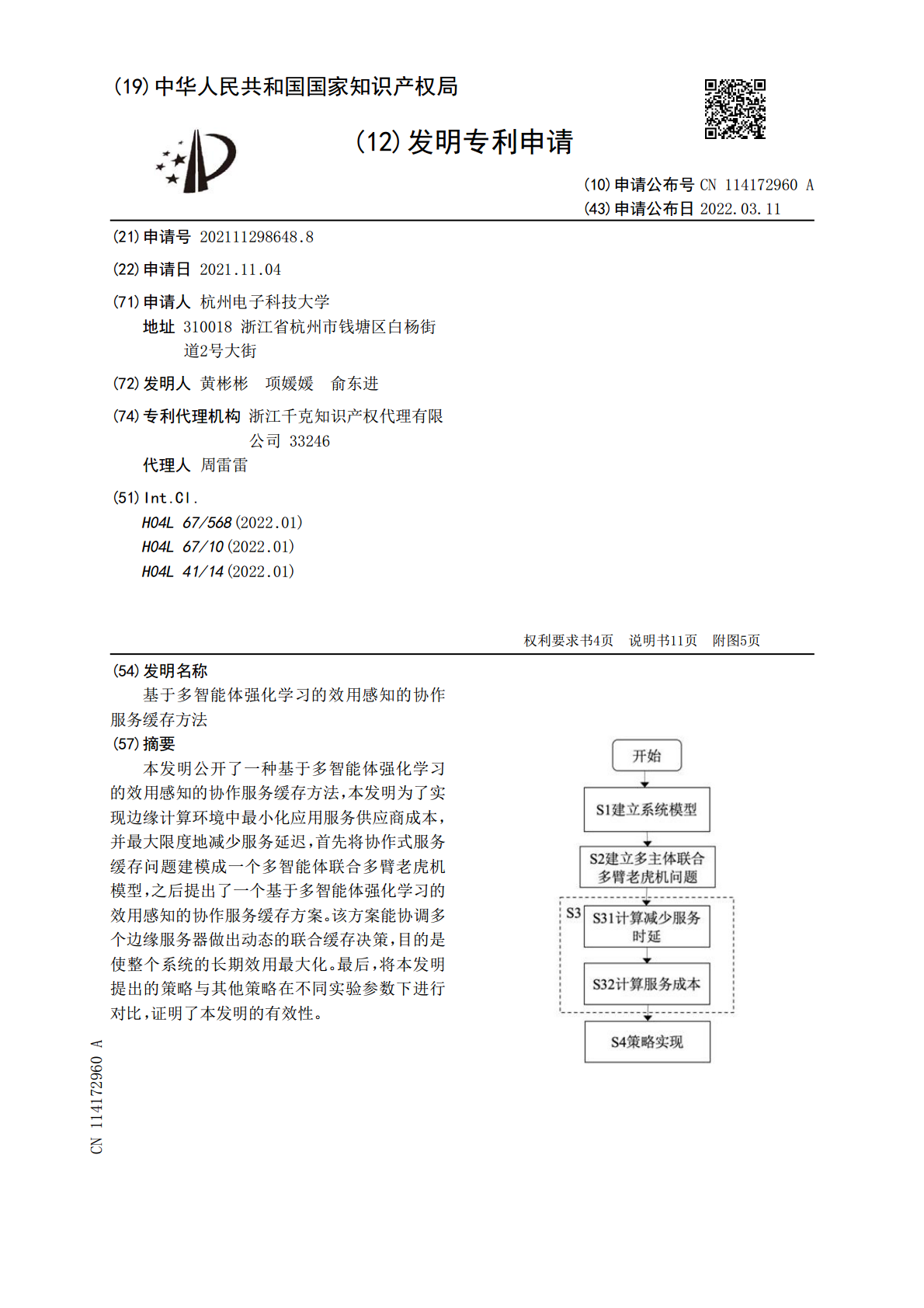
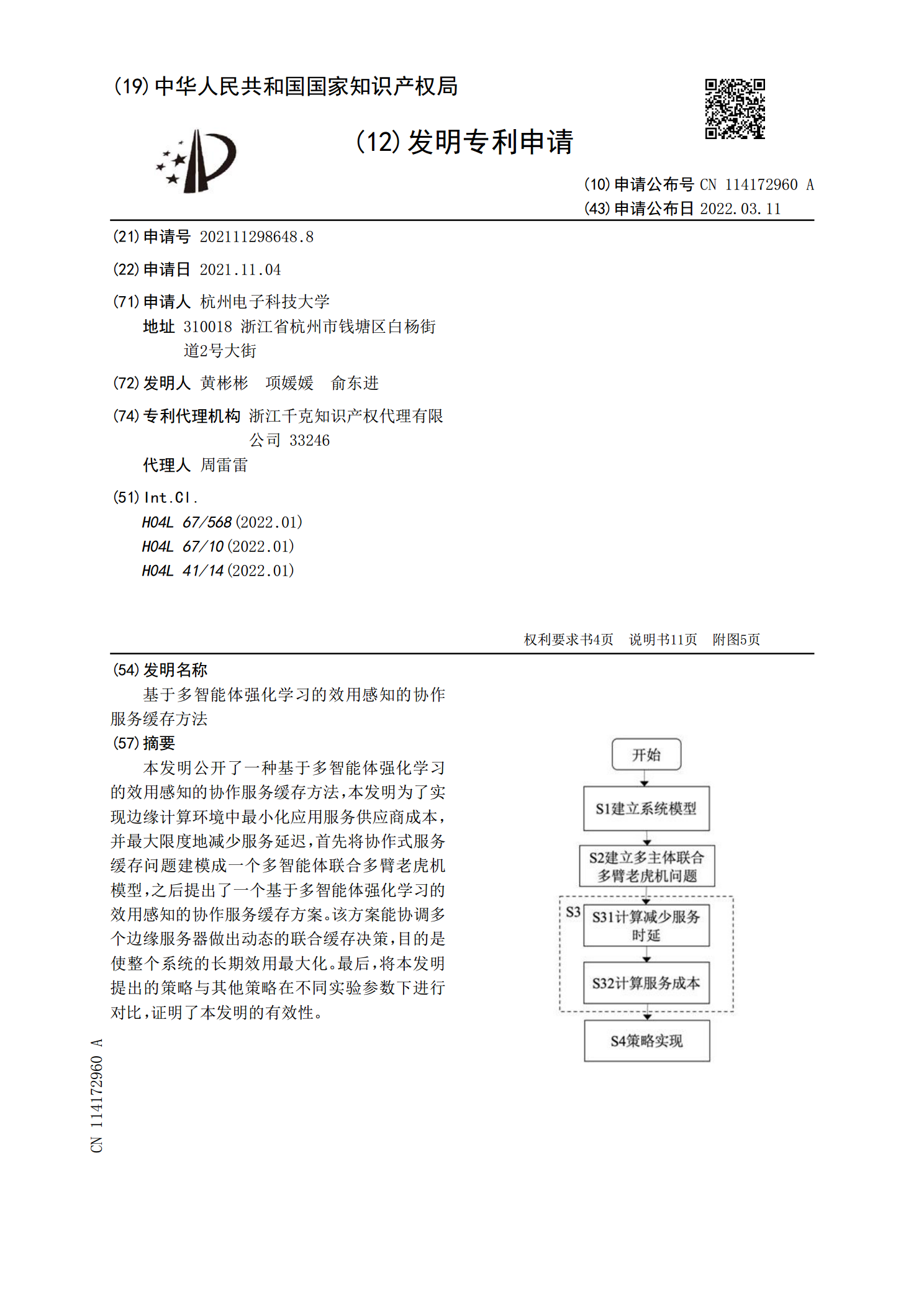
本发明公开了一种基于多智能体强化学习的效用感知的协作服务缓存方法,本发明为了实现边缘计算环境中最小化应用服务供应商成本,并最大限度地减少服务延迟,首先将协作式服务缓存问题建模成一个多智能体联合多臂老虎机模型,之后提出了一个基于多智能体强化学习的效用感知的协作服务缓存方案。该方案能协调多个边缘服务器做出动态的联合缓存决策,目的是使整个系统的长期效用最大化。最后,将本发明提出的策略与其他策略在不同实验参数下进行对比,证明了本发明的有效性。
基于多智能体强化学习模型的边缘缓存方法和装置.pdf
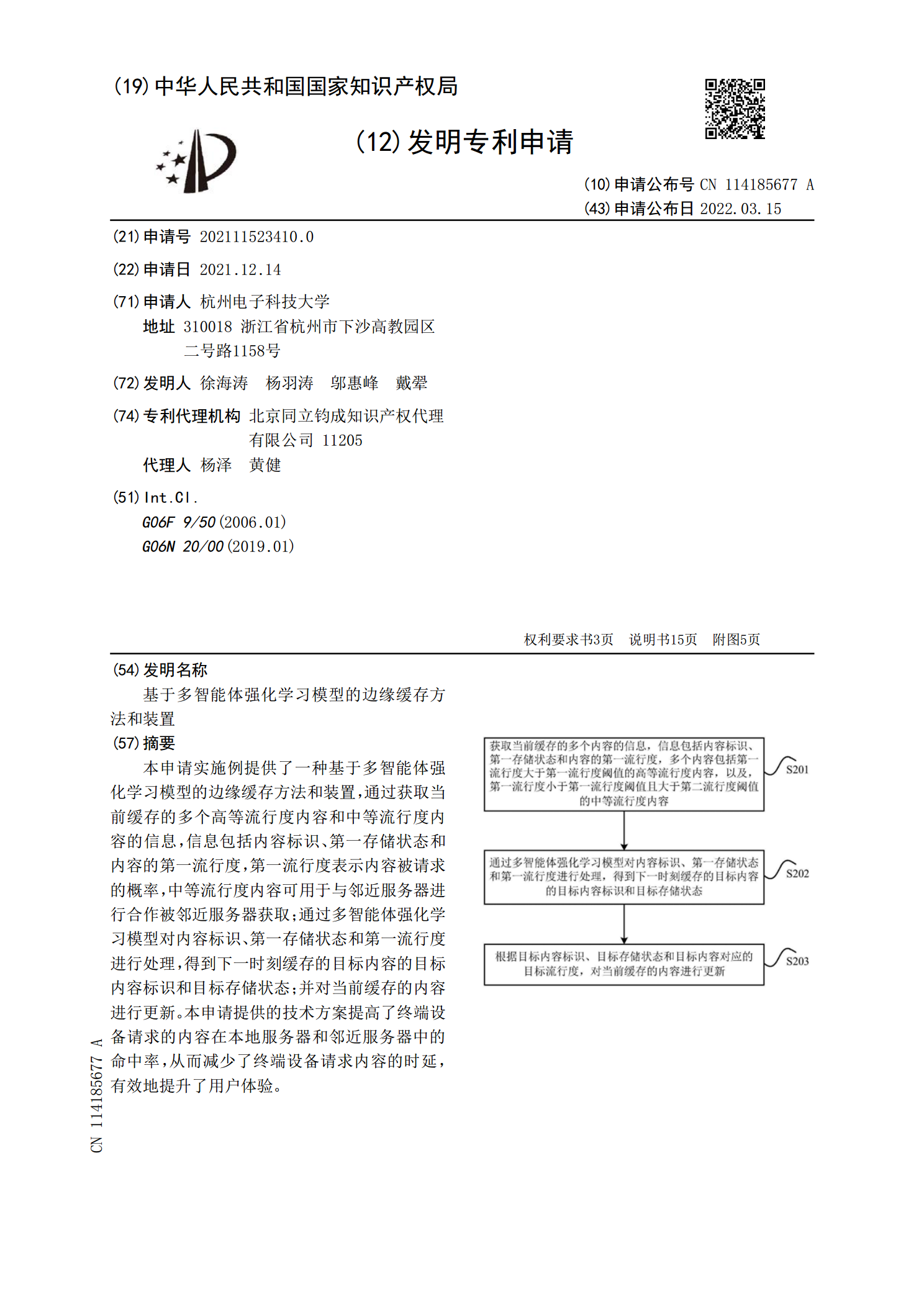
本申请实施例提供了一种基于多智能体强化学习模型的边缘缓存方法和装置,通过获取当前缓存的多个高等流行度内容和中等流行度内容的信息,信息包括内容标识、第一存储状态和内容的第一流行度,第一流行度表示内容被请求的概率,中等流行度内容可用于与邻近服务器进行合作被邻近服务器获取;通过多智能体强化学习模型对内容标识、第一存储状态和第一流行度进行处理,得到下一时刻缓存的目标内容的目标内容标识和目标存储状态;并对当前缓存的内容进行更新。本申请提供的技术方案提高了终端设备请求的内容在本地服务器和邻近服务器中的命中率,从而减少
基于多智能体深度强化学习的动态协作簇选择方法及装置.pdf
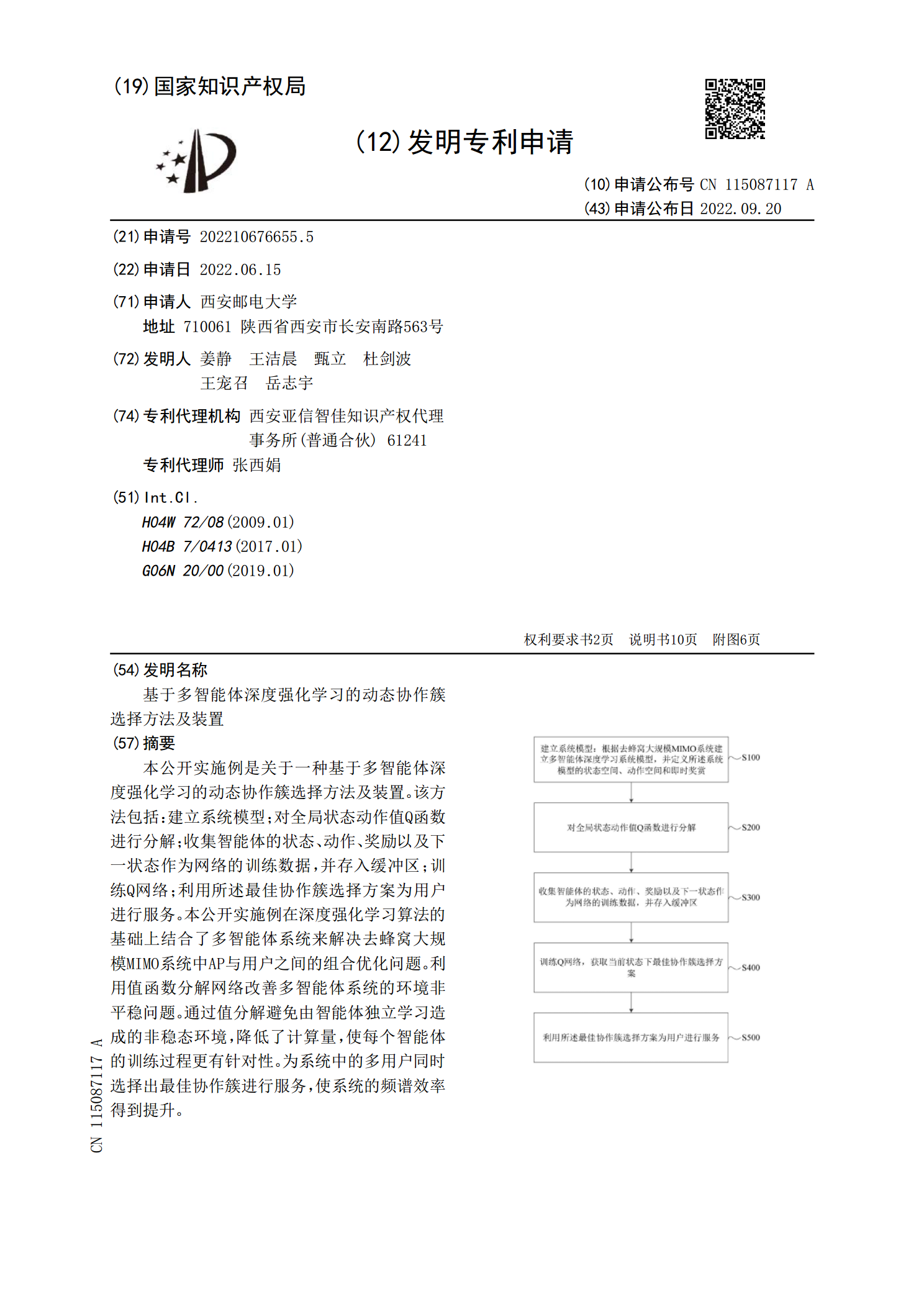
本公开实施例是关于一种基于多智能体深度强化学习的动态协作簇选择方法及装置。该方法包括:建立系统模型;对全局状态动作值Q函数进行分解;收集智能体的状态、动作、奖励以及下一状态作为网络的训练数据,并存入缓冲区;训练Q网络;利用所述最佳协作簇选择方案为用户进行服务。本公开实施例在深度强化学习算法的基础上结合了多智能体系统来解决去蜂窝大规模MIMO系统中AP与用户之间的组合优化问题。利用值函数分解网络改善多智能体系统的环境非平稳问题。通过值分解避免由智能体独立学习造成的非稳态环境,降低了计算量,使每个智能体的训练

基于多智能体强化学习的多机器人协作策略研究.docx
基于多智能体强化学习的多机器人协作策略研究随着机器人技术的不断发展,多机器人协作策略的研究变得越来越重要。而多智能体强化学习则是目前研究的热点之一,它通过多个智能体之间的互动,实现协作行为的学习和优化。本文将详细探讨基于多智能体强化学习的多机器人协作策略研究的意义、方法及应用。一、多机器人协作策略研究的意义多机器人协作策略研究的意义在于实现多台机器人之间的协同工作,从而提高工作效率和工作质量。在某些领域,如救援、探测等,机器人可以替代人工进行行动,但是在这些场景中,一台机器人无法完成任务,需要多个机器人之

基于多智能体强化学习的大规模服务组合优化方法.pdf
本发明公开了一种基于多智能体强化学习的自适应组合服务优化方法,将强化学习与智能体概念相结合,定义强化学习的状态集为服务的前置后置条件,动作集为Web服务本身。初始化强化学习中Q学习的参数,包括学习率、折扣因子和Q值。每个智能体执行一个组合优化任务。智能体可以感知当前状态,并根据动作选择策略选择当前状态下的最优动作。根据Q学习算法计算与更新Q值。一轮学习过程结束则进入下一轮学习,直至Q值收敛,获得最优策略。本发明根据当时环境变化在线制定出相应的自适应行为策略,具有较高的灵活性与自适应性,具有较高的实用价值。