
手掌位置确定方法、装置、电子设备及存储介质.pdf

一条****88

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手掌位置确定方法、装置、电子设备及存储介质.pdf
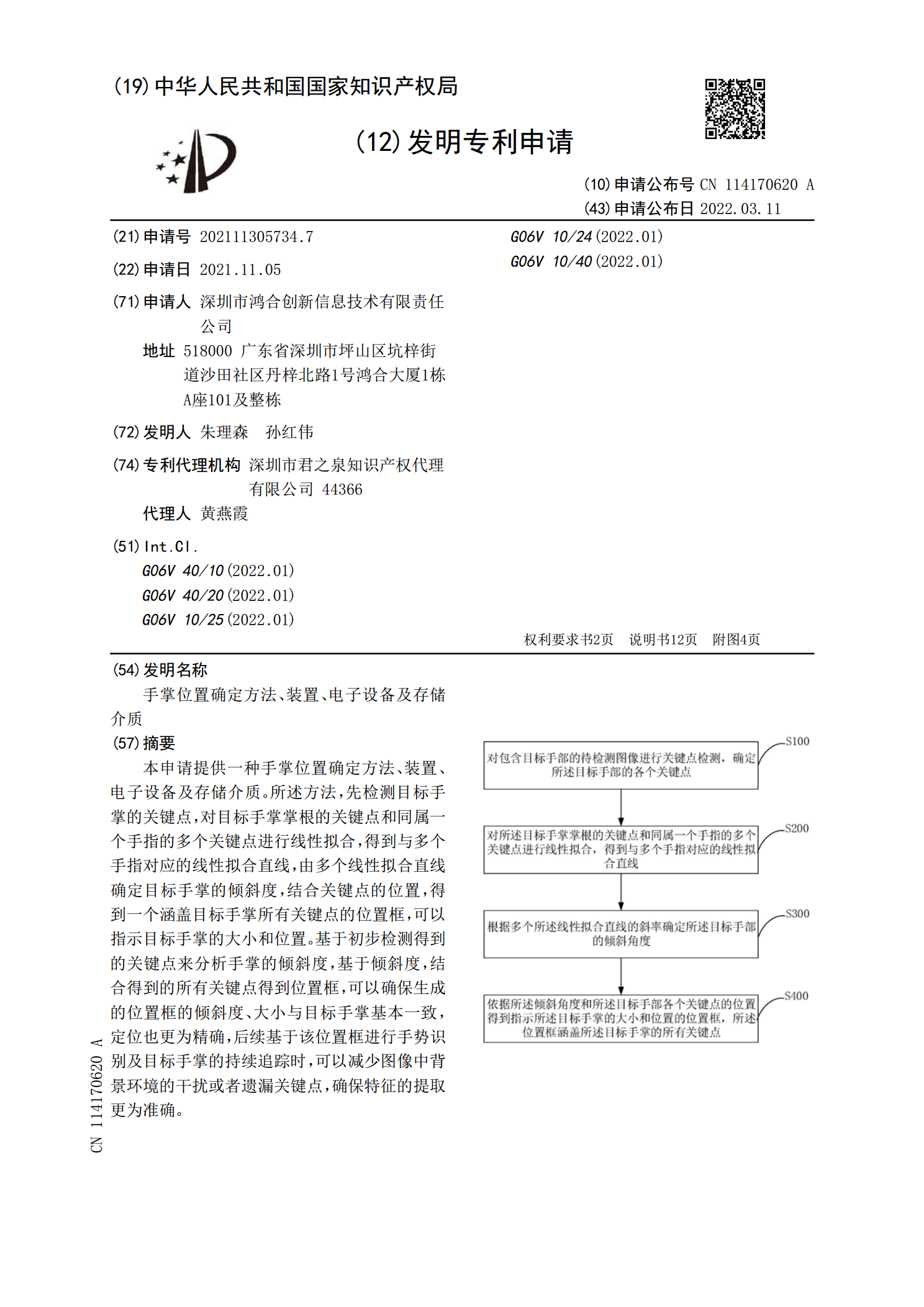
本申请提供一种手掌位置确定方法、装置、电子设备及存储介质。所述方法,先检测目标手掌的关键点,对目标手掌掌根的关键点和同属一个手指的多个关键点进行线性拟合,得到与多个手指对应的线性拟合直线,由多个线性拟合直线确定目标手掌的倾斜度,结合关键点的位置,得到一个涵盖目标手掌所有关键点的位置框,可以指示目标手掌的大小和位置。基于初步检测得到的关键点来分析手掌的倾斜度,基于倾斜度,结合得到的所有关键点得到位置框,可以确保生成的位置框的倾斜度、大小与目标手掌基本一致,定位也更为精确,后续基于该位置框进行手势识别及目标手
车辆位置确定方法、装置、电子设备及存储介质.pdf
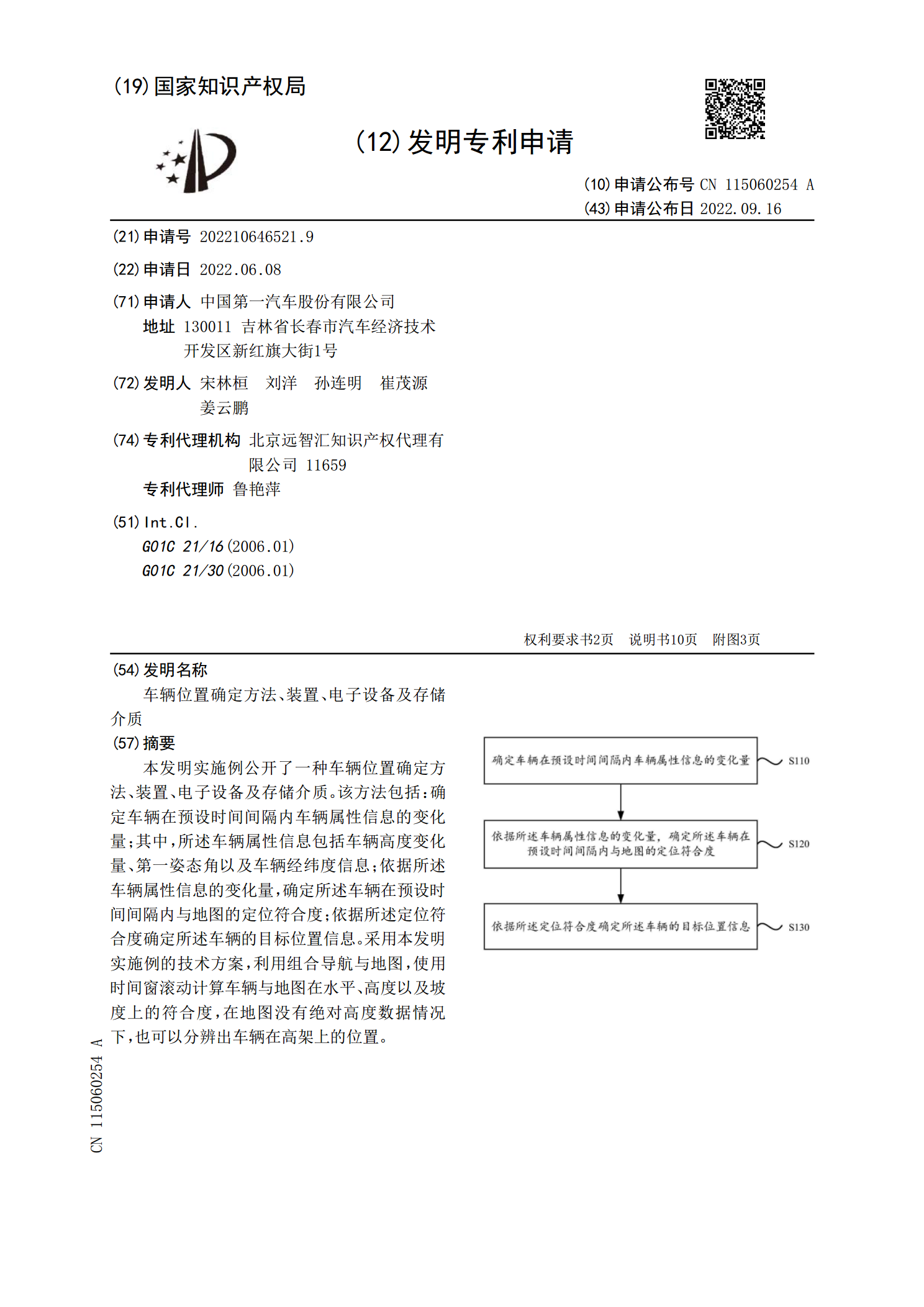
本发明实施例公开了一种车辆位置确定方法、装置、电子设备及存储介质。该方法包括:确定车辆在预设时间间隔内车辆属性信息的变化量;其中,所述车辆属性信息包括车辆高度变化量、第一姿态角以及车辆经纬度信息;依据所述车辆属性信息的变化量,确定所述车辆在预设时间间隔内与地图的定位符合度;依据所述定位符合度确定所述车辆的目标位置信息。采用本发明实施例的技术方案,利用组合导航与地图,使用时间窗滚动计算车辆与地图在水平、高度以及坡度上的符合度,在地图没有绝对高度数据情况下,也可以分辨出车辆在高架上的位置。
目标位置确定方法、装置、电子设备以及存储介质.pdf
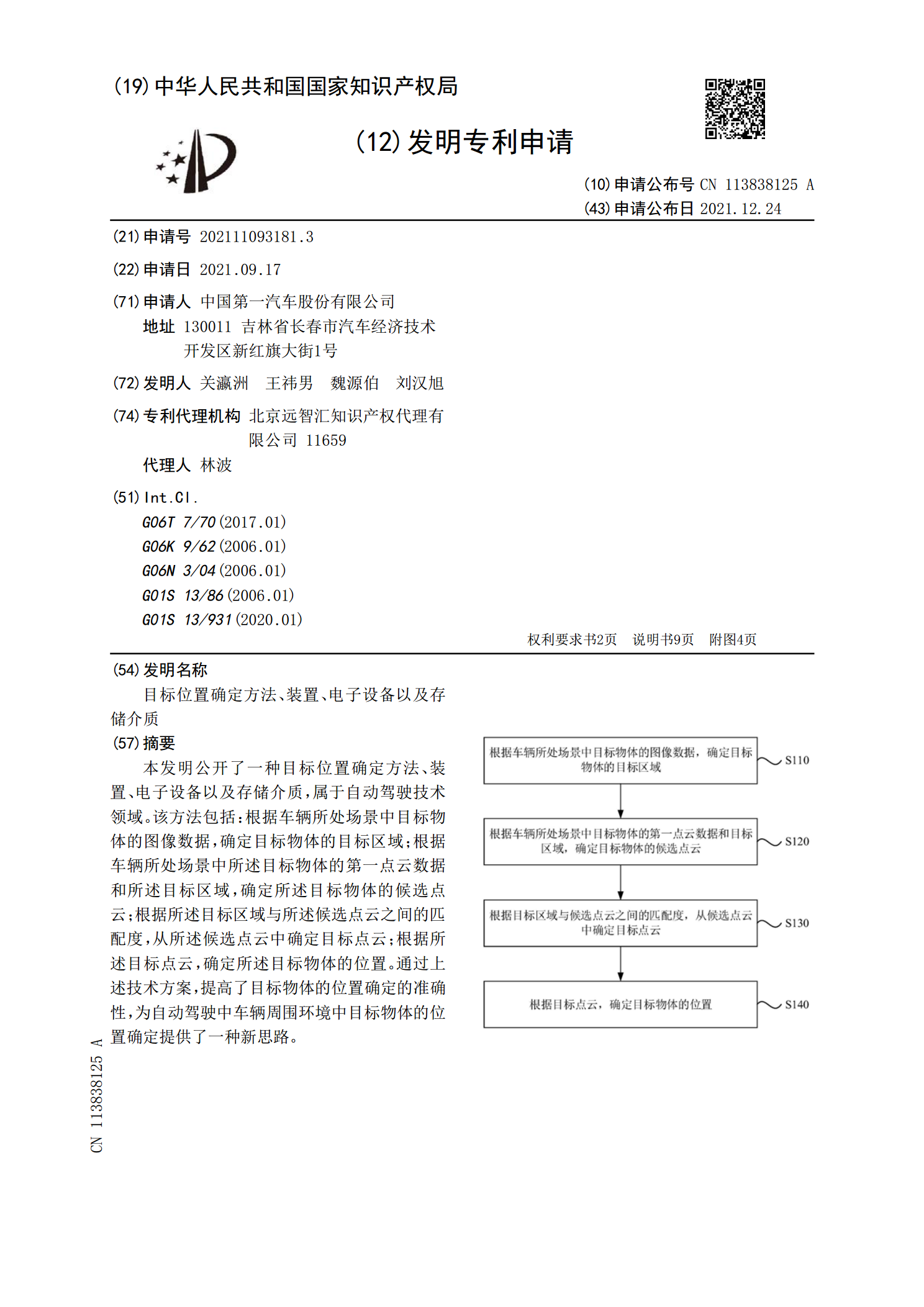
本发明公开了一种目标位置确定方法、装置、电子设备以及存储介质,属于自动驾驶技术领域。该方法包括:根据车辆所处场景中目标物体的图像数据,确定目标物体的目标区域;根据车辆所处场景中所述目标物体的第一点云数据和所述目标区域,确定所述目标物体的候选点云;根据所述目标区域与所述候选点云之间的匹配度,从所述候选点云中确定目标点云;根据所述目标点云,确定所述目标物体的位置。通过上述技术方案,提高了目标物体的位置确定的准确性,为自动驾驶中车辆周围环境中目标物体的位置确定提供了一种新思路。
像素位置的确定方法、装置、电子设备和存储介质.pdf
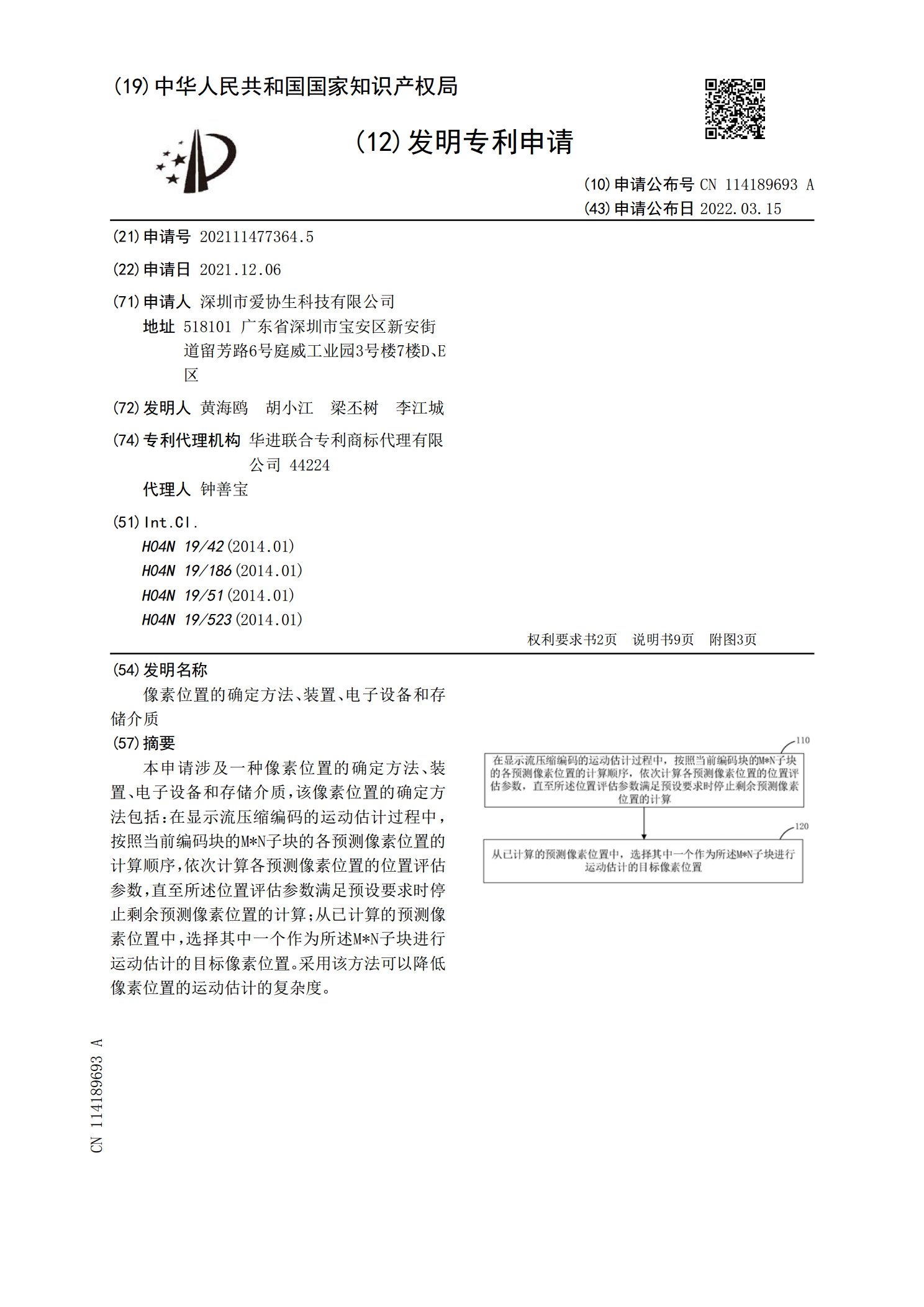
本申请涉及一种像素位置的确定方法、装置、电子设备和存储介质,该像素位置的确定方法包括:在显示流压缩编码的运动估计过程中,按照当前编码块的M*N子块的各预测像素位置的计算顺序,依次计算各预测像素位置的位置评估参数,直至所述位置评估参数满足预设要求时停止剩余预测像素位置的计算;从已计算的预测像素位置中,选择其中一个作为所述M*N子块进行运动估计的目标像素位置。采用该方法可以降低像素位置的运动估计的复杂度。
停留位置的确定方法和装置、存储介质及电子设备.pdf
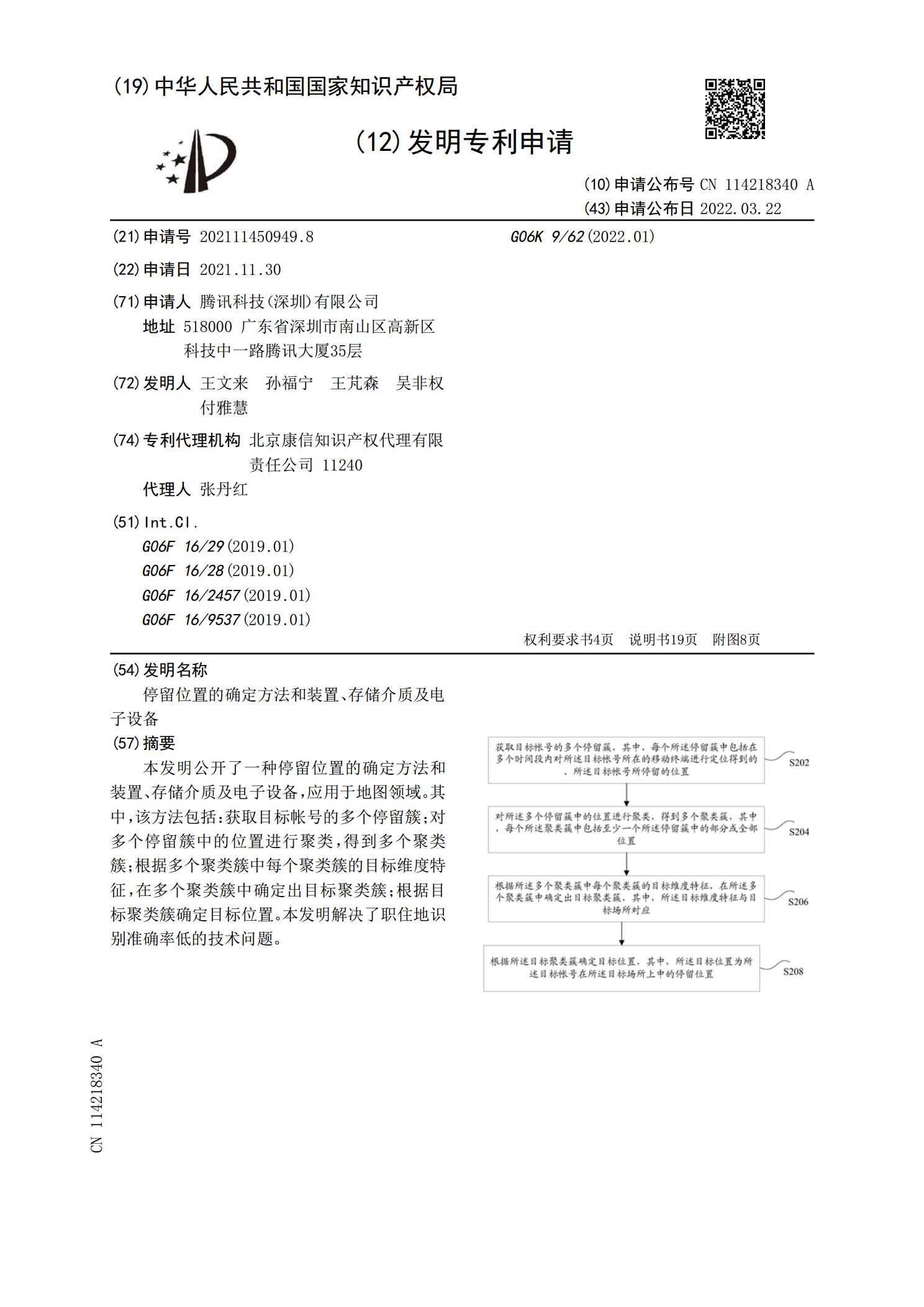
本发明公开了一种停留位置的确定方法和装置、存储介质及电子设备,应用于地图领域。其中,该方法包括:获取目标帐号的多个停留簇;对多个停留簇中的位置进行聚类,得到多个聚类簇;根据多个聚类簇中每个聚类簇的目标维度特征,在多个聚类簇中确定出目标聚类簇;根据目标聚类簇确定目标位置。本发明解决了职住地识别准确率低的技术问题。