
单、多传感器多目标关联匹配方法、系统及车辆.pdf

静芙****可爱


1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
单、多传感器多目标关联匹配方法、系统及车辆.pdf
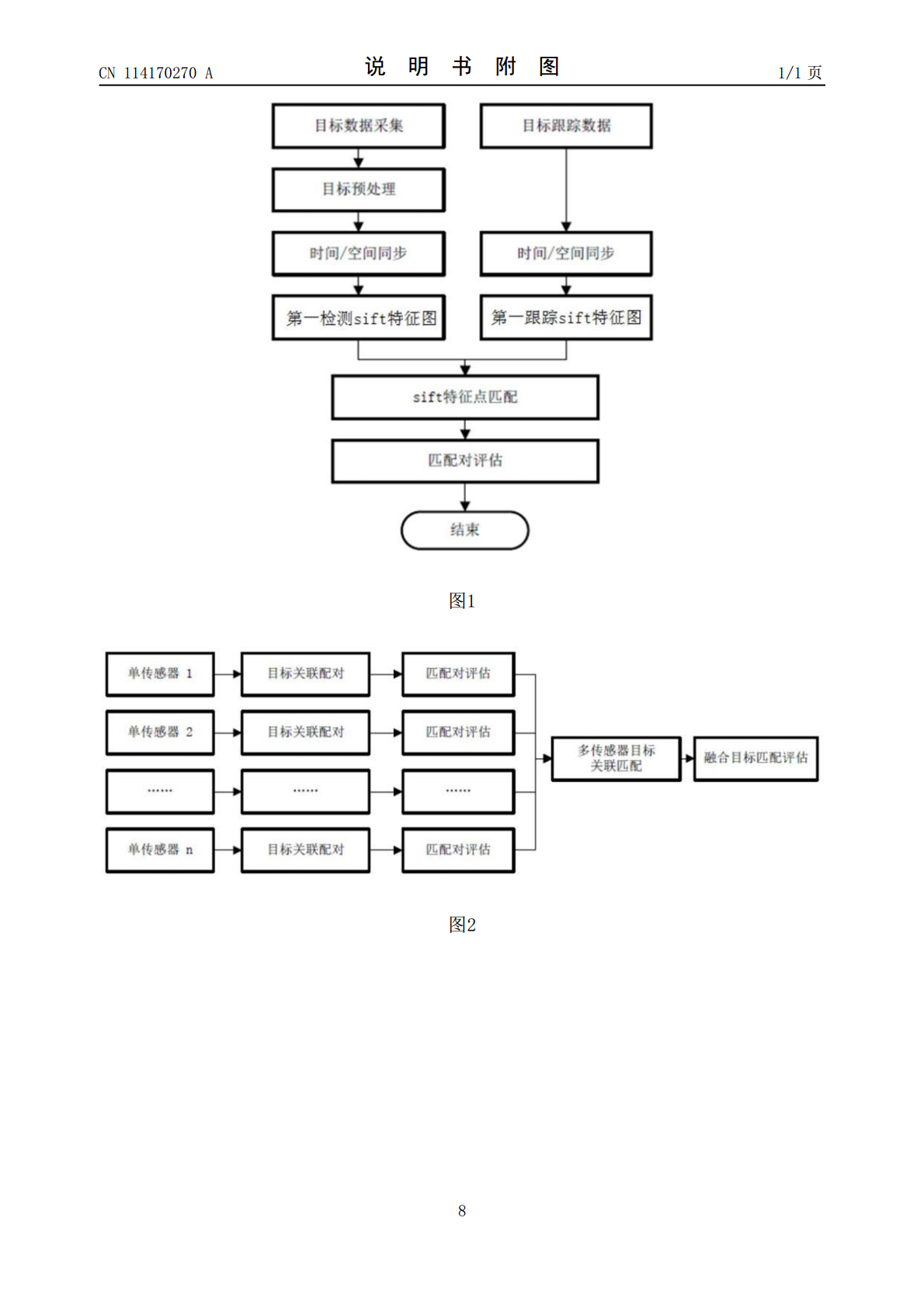
本发明公开了一种单、多传感器多目标关联匹配方法、系统及车辆,包括:步骤1、获取驾驶道路的目标信息;步骤2、对获取的目标信息进行预处理;步骤3、对检测的目标进行时间补偿和空间同步;步骤4、根据检测目标的位置和速度生成第一检测sift特征图;步骤5、对跟踪目标进行时间补偿和空间同步;步骤6、根据跟踪目标的位置和速度生成第一跟踪sift特征图;步骤7、基于第一检测sift特征图和第一跟踪sift特征图进行目标关联配对;步骤8、结合跟踪配对信息评估出最优匹配对,并将最优匹配对作为传感器的检测目标输出。本发明能够实

基于多特征匹配的多目标跟踪方法.pdf
一种基于多特征匹配的多目标跟踪算法,其步骤是:首先,针对量测点与目标关联时,匹配特征数量过少的问题,建立了所有目标的特征矩阵,特征矩阵包含了所有目标的检验统计量特征和多普勒频率特征;其次,在寻找最佳关联点时,将所有关联点的特征与目标的特征矩阵进行比对,找出与目标匹配度最高的关联点;最后,确定目标在当前跟踪时刻的运动状态估计值、检验统计量和多普勒频率特征,用于对目标在当前跟踪时刻之后运动状态的估计。本发明通过建立特征矩阵,并寻找与目标特征矩阵最匹配的关联点,解决了当多目标轨迹交叉重叠时目标轨迹跟踪不准确的问

多传感器联合空时偏差校准及多目标关联融合方法及装置.pdf
本发明实施例涉及数据处理技术领域,特别涉及一种多传感器联合空时偏差校准及多目标关联融合方法及装置。方法包括:基于上一时刻的航迹列表,确定航迹列表中每一个航迹对应的扩维状态估计采样点集合和权重集合,结合当前时刻的观测数据列表,计算每一对航迹‑观测数据组合的关联代价,来对航迹与观测数据进行关联,得到关联结果列表、未关联航迹列表和未关联观测数据列表;分别对未关联航迹列表和关联结果列表中的航迹进行更新处理,得到当前时刻的未关联更新航迹列表和已关联航迹列表;对已关联航迹列表进行空时偏差的反馈式融合处理,得到融合后的

多传感器多目标航迹关联与融合算法研究.docx
分类号密级UDC注1学位论文多传感器多目标航迹关联与融合算法研究(题名和副题名)程跃兵(作者姓名)指导教师姓名戴跃伟教授闫玉德副教授

多传感器多目标航迹关联与融合算法研究.docx
分类号密级UDC注1学位论文多传感器多目标航迹关联与融合算法研究(题名和副题名)程跃兵(作者姓名)指导教师姓名戴跃伟教授闫玉德副教授申请学位级别硕士专业名称控制理论与控制工程论文提交日期2010.05论文答辩日期2010.06学位授予单位和日期南京理工大学答辩委员会主席评阅人年月日声明本学位论文是我在导师的指导下取得的研究成果,尽我所知,在本学位论文中,除了加以标注和致谢的部分外,不包含其他人已经发表或公布过的研究成果,也不包含我为获得任何教育机构的学位或学历而使用过的材料。与我一同工作的同事对本学位论文