
基于语义分割的重定位方法、装置和电子设备.pdf

一条****88


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于语义分割的重定位方法、装置和电子设备.pdf
本发明提供了一种基于语义分割的重定位方法、装置和电子设备,包括,对当前车辆所处停驻位置对应的当前环境图像和历史采集的关键环境图像集合分别进行语义分割,得到每张图像对应的多个静态对象语义类别;以静态对象语义类别的拓扑关系作为每张图像的描述子从关键环境图像集合中确定当前环境图像对应的目标环境图像;基于目标环境图像对应的位置信息重定位当前车辆,避免出现图像光照鲁棒性较差的问题,能够适应于各种车辆应用场景。
语义分割方法和语义分割装置.pdf
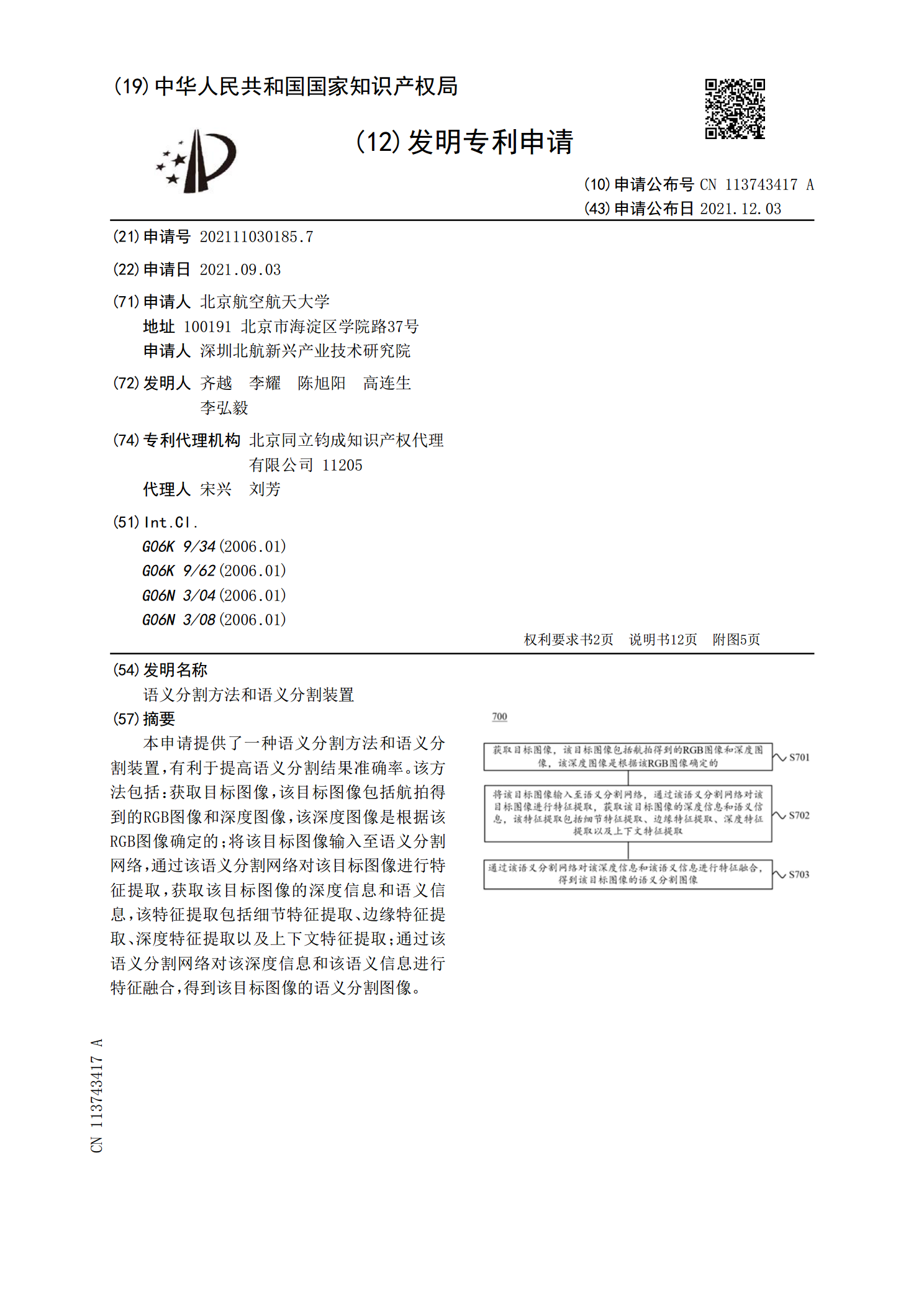
本申请提供了一种语义分割方法和语义分割装置,有利于提高语义分割结果准确率。该方法包括:获取目标图像,该目标图像包括航拍得到的RGB图像和深度图像,该深度图像是根据该RGB图像确定的;将该目标图像输入至语义分割网络,通过该语义分割网络对该目标图像进行特征提取,获取该目标图像的深度信息和语义信息,该特征提取包括细节特征提取、边缘特征提取、深度特征提取以及上下文特征提取;通过该语义分割网络对该深度信息和该语义信息进行特征融合,得到该目标图像的语义分割图像。
图像语义分割方法、装置、电子设备和存储介质.pdf
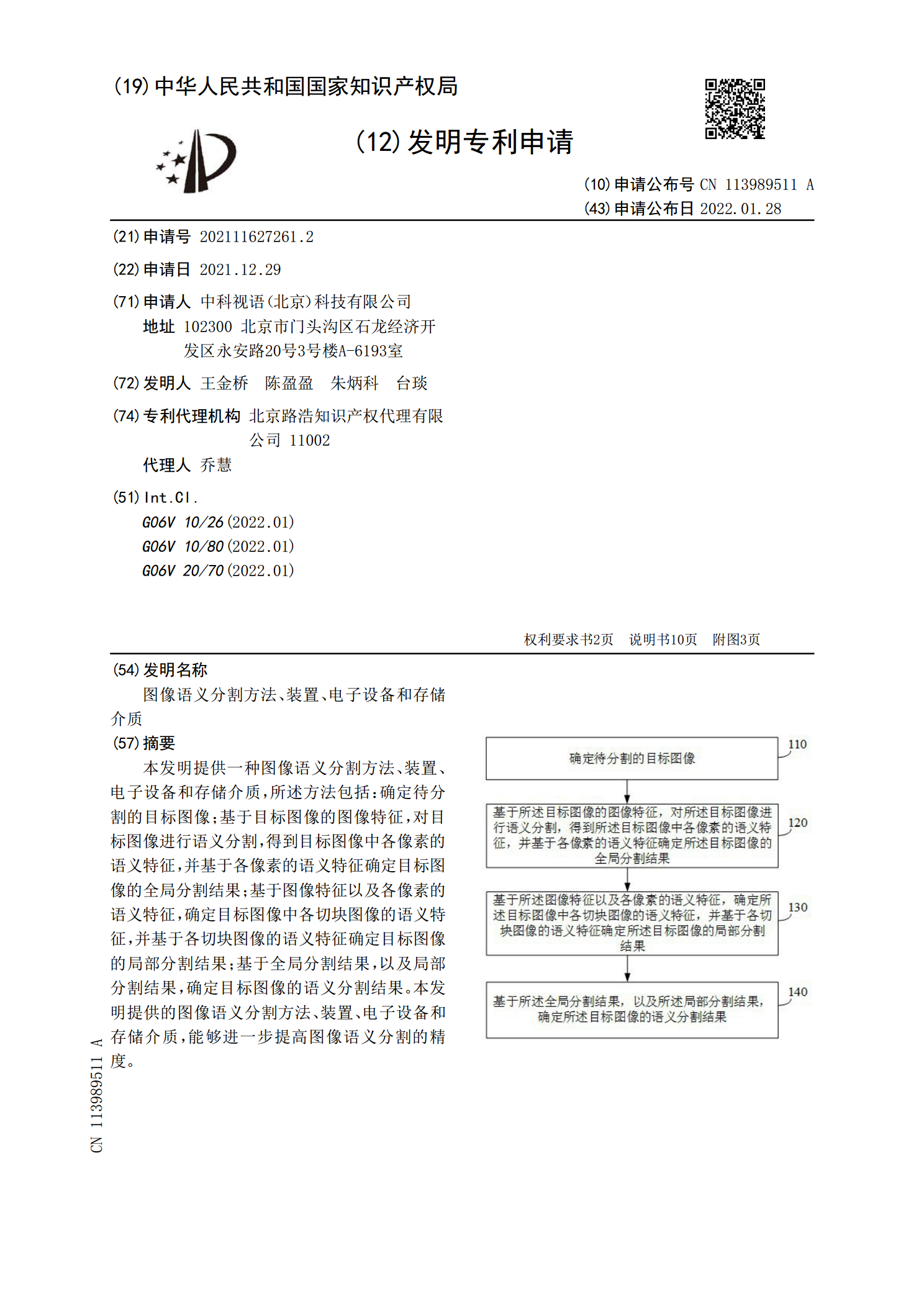
本发明提供一种图像语义分割方法、装置、电子设备和存储介质,所述方法包括:确定待分割的目标图像;基于目标图像的图像特征,对目标图像进行语义分割,得到目标图像中各像素的语义特征,并基于各像素的语义特征确定目标图像的全局分割结果;基于图像特征以及各像素的语义特征,确定目标图像中各切块图像的语义特征,并基于各切块图像的语义特征确定目标图像的局部分割结果;基于全局分割结果,以及局部分割结果,确定目标图像的语义分割结果。本发明提供的图像语义分割方法、装置、电子设备和存储介质,能够进一步提高图像语义分割的精度。

基于语义分割的车辆行驶车道定位方法.docx
基于语义分割的车辆行驶车道定位方法基于语义分割的车辆行驶车道定位方法摘要:车辆行驶车道定位是自动驾驶系统中的一个关键任务,它可为车辆提供准确的位置估计信息,从而实现自动驾驶的目标。本文提出了一种基于语义分割的车辆行驶车道定位方法。首先,通过使用深度学习模型,对输入图像进行语义分割,得到各个像素点的语义标签。然后,根据语义标签和车道几何形状的先验知识,将车辆行驶车道从语义分割结果中提取出来。最后,利用车道上的特征点进行车道线拟合,实现车辆行驶车道的定位。实验结果表明,本方法具有较高的定位准确性和鲁棒性。1.
基于语义分割的实例分割系统和方法.pdf
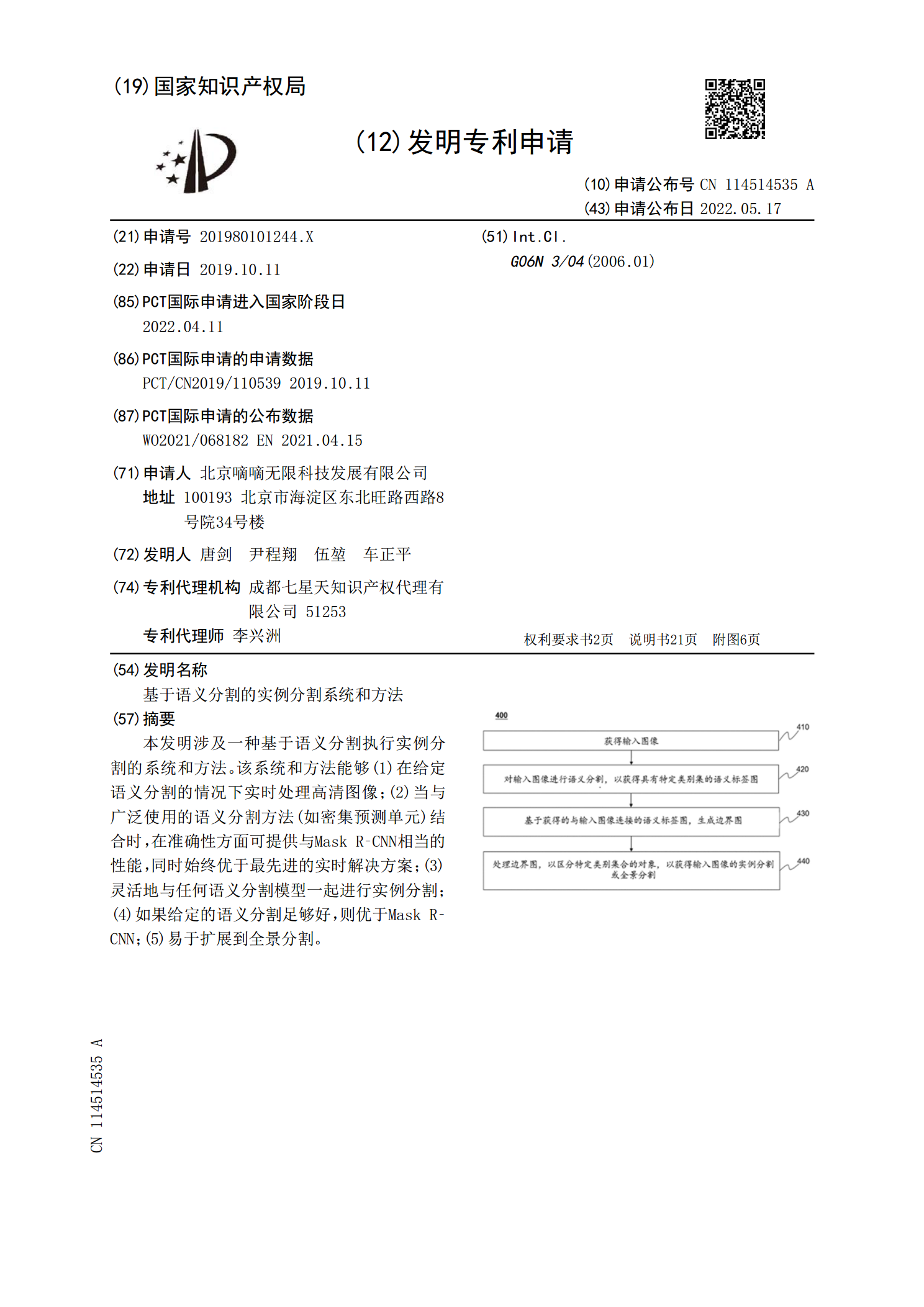
本发明涉及一种基于语义分割执行实例分割的系统和方法。该系统和方法能够(1)在给定语义分割的情况下实时处理高清图像;(2)当与广泛使用的语义分割方法(如密集预测单元)结合时,在准确性方面可提供与MaskR?CNN相当的性能,同时始终优于最先进的实时解决方案;(3)灵活地与任何语义分割模型一起进行实例分割;(4)如果给定的语义分割足够好,则优于MaskR?CNN;(5)易于扩展到全景分割。