
一种基于视觉的水面油污检测方法.pdf

努力****甲寅

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于视觉的水面油污检测方法.pdf
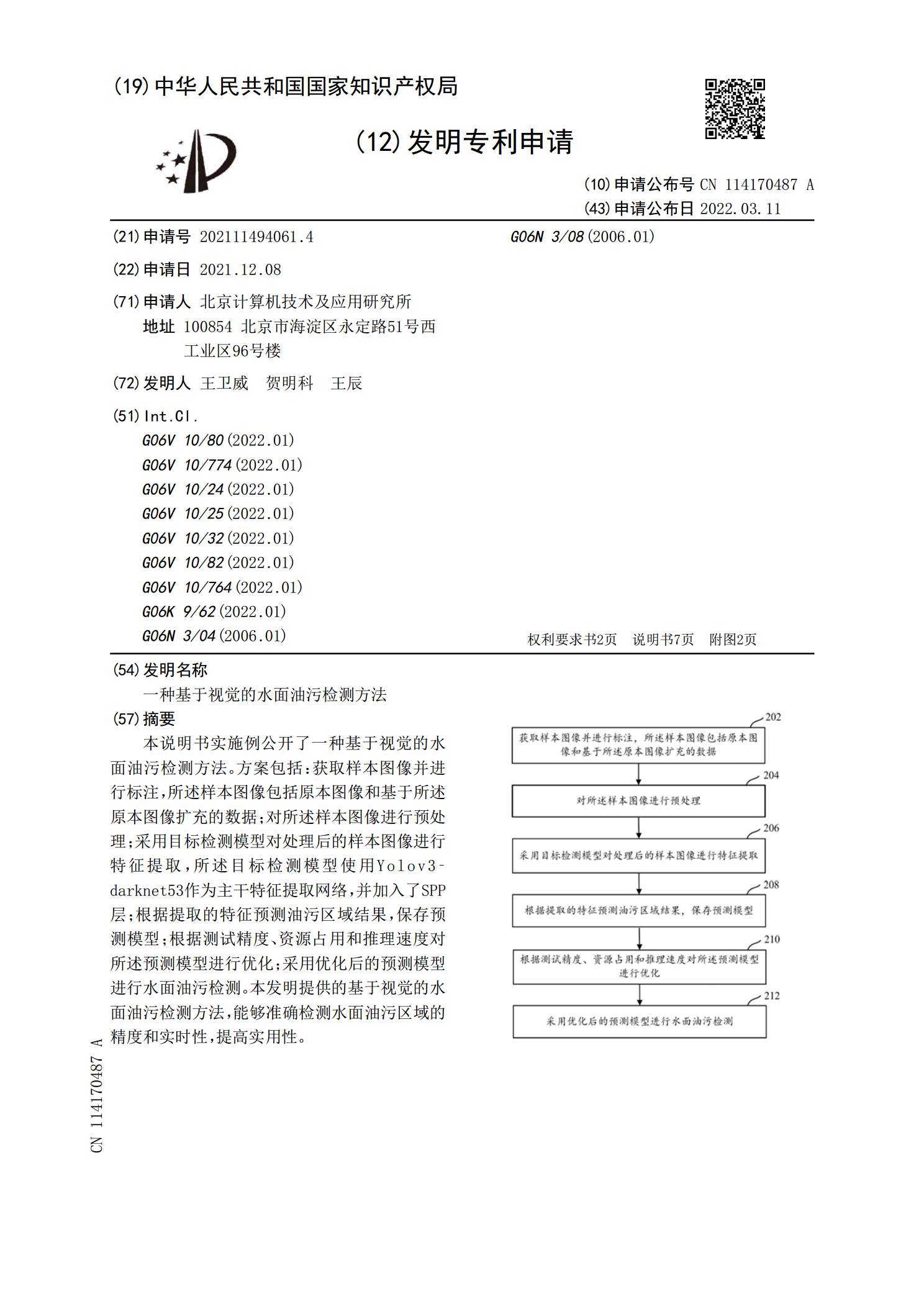
本说明书实施例公开了一种基于视觉的水面油污检测方法。方案包括:获取样本图像并进行标注,所述样本图像包括原本图像和基于所述原本图像扩充的数据;对所述样本图像进行预处理;采用目标检测模型对处理后的样本图像进行特征提取,所述目标检测模型使用Yolov3‑darknet53作为主干特征提取网络,并加入了SPP层;根据提取的特征预测油污区域结果,保存预测模型;根据测试精度、资源占用和推理速度对所述预测模型进行优化;采用优化后的预测模型进行水面油污检测。本发明提供的基于视觉的水面油污检测方法,能够准确检测水面油污区域
一种基于机器视觉的手套撕破和油污检测方法.pdf
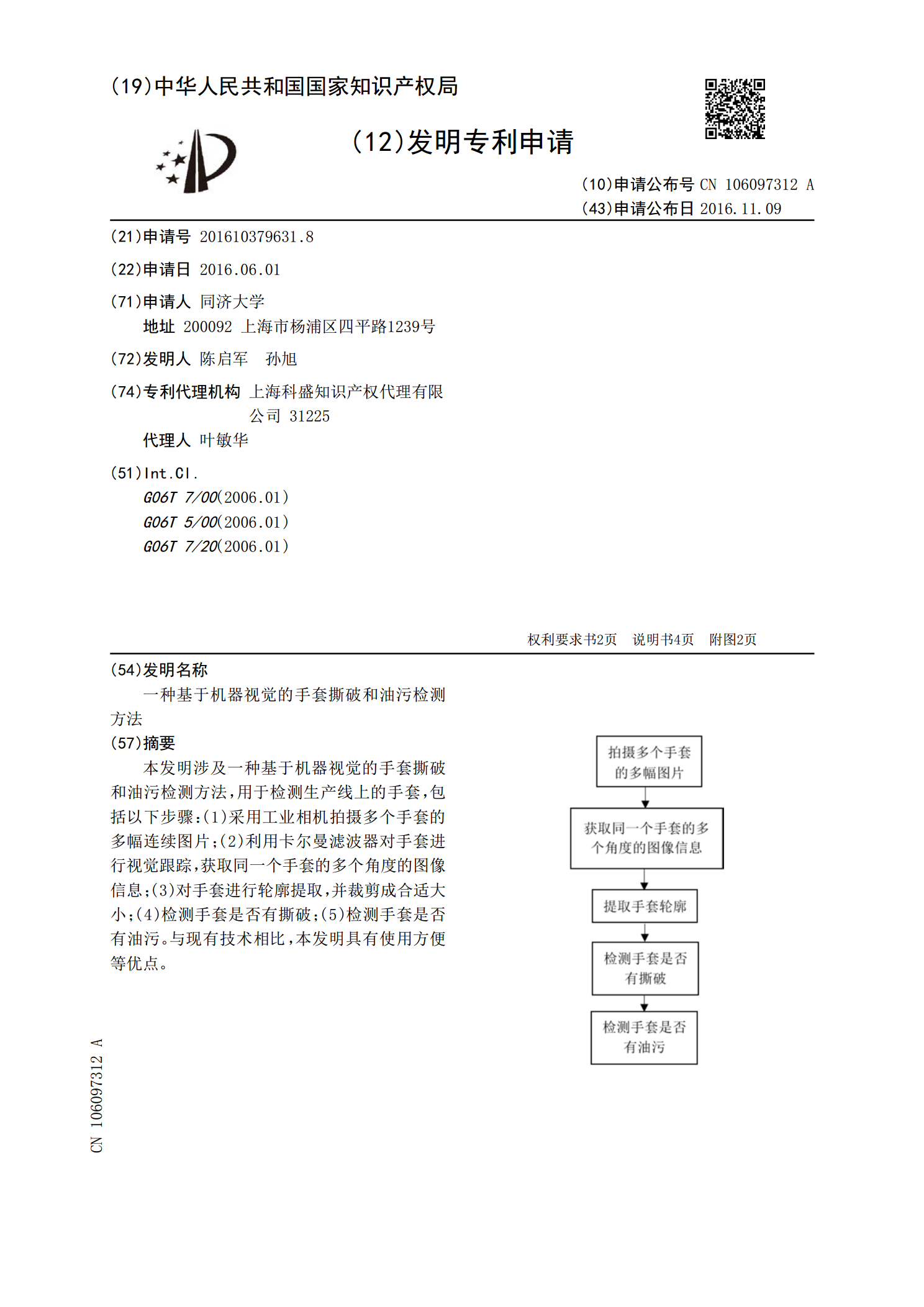
本发明涉及一种基于机器视觉的手套撕破和油污检测方法,用于检测生产线上的手套,包括以下步骤:(1)采用工业相机拍摄多个手套的多幅连续图片;(2)利用卡尔曼滤波器对手套进行视觉跟踪,获取同一个手套的多个角度的图像信息;(3)对手套进行轮廓提取,并裁剪成合适大小;(4)检测手套是否有撕破;(5)检测手套是否有油污。与现有技术相比,本发明具有使用方便等优点。
一种基于深度学习的全景视觉水面目标检测方法.pdf
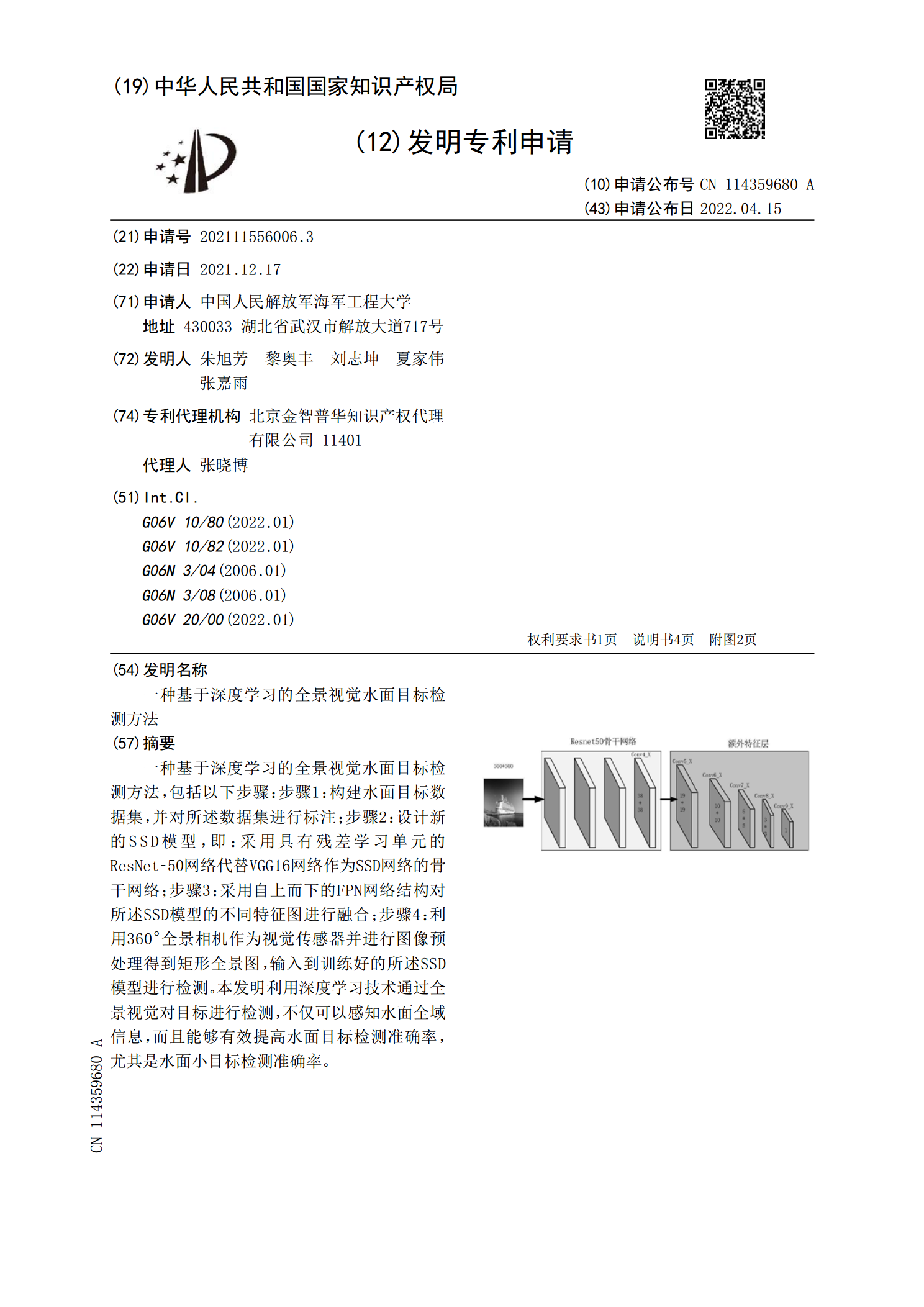
一种基于深度学习的全景视觉水面目标检测方法,包括以下步骤:步骤1:构建水面目标数据集,并对所述数据集进行标注;步骤2:设计新的SSD模型,即:采用具有残差学习单元的ResNet?50网络代替VGG16网络作为SSD网络的骨干网络;步骤3:采用自上而下的FPN网络结构对所述SSD模型的不同特征图进行融合;步骤4:利用360°全景相机作为视觉传感器并进行图像预处理得到矩形全景图,输入到训练好的所述SSD模型进行检测。本发明利用深度学习技术通过全景视觉对目标进行检测,不仅可以感知水面全域信息,而且能够有效提高水
基于USV的视觉检测和水面目标追踪系统及其检测追踪方法.pdf
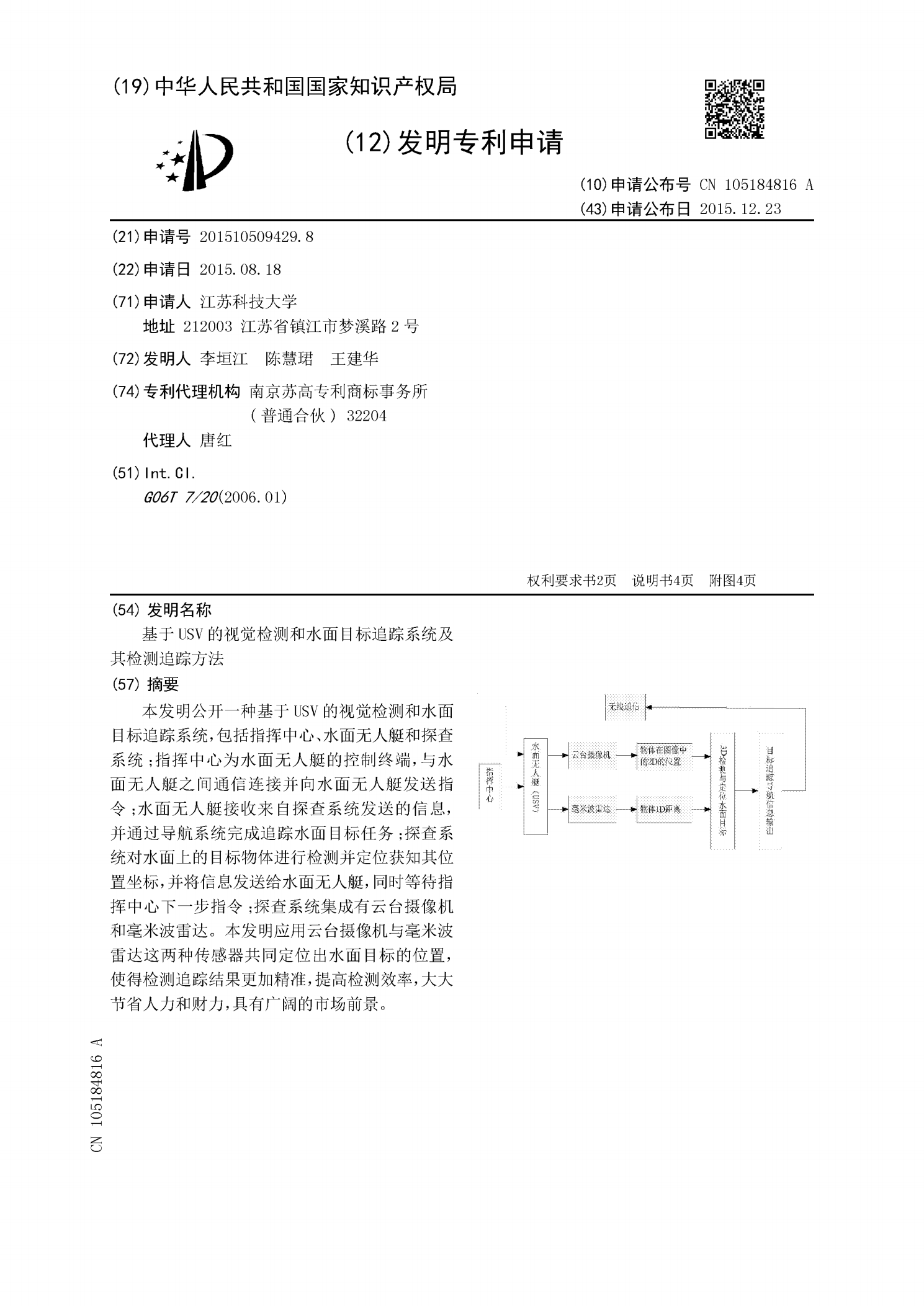
本发明公开一种基于USV的视觉检测和水面目标追踪系统,包括指挥中心、水面无人艇和探查系统;指挥中心为水面无人艇的控制终端,与水面无人艇之间通信连接并向水面无人艇发送指令;水面无人艇接收来自探查系统发送的信息,并通过导航系统完成追踪水面目标任务;探查系统对水面上的目标物体进行检测并定位获知其位置坐标,并将信息发送给水面无人艇,同时等待指挥中心下一步指令;探查系统集成有云台摄像机和毫米波雷达。本发明应用云台摄像机与毫米波雷达这两种传感器共同定位出水面目标的位置,使得检测追踪结果更加精准,提高检测效率,大大节省
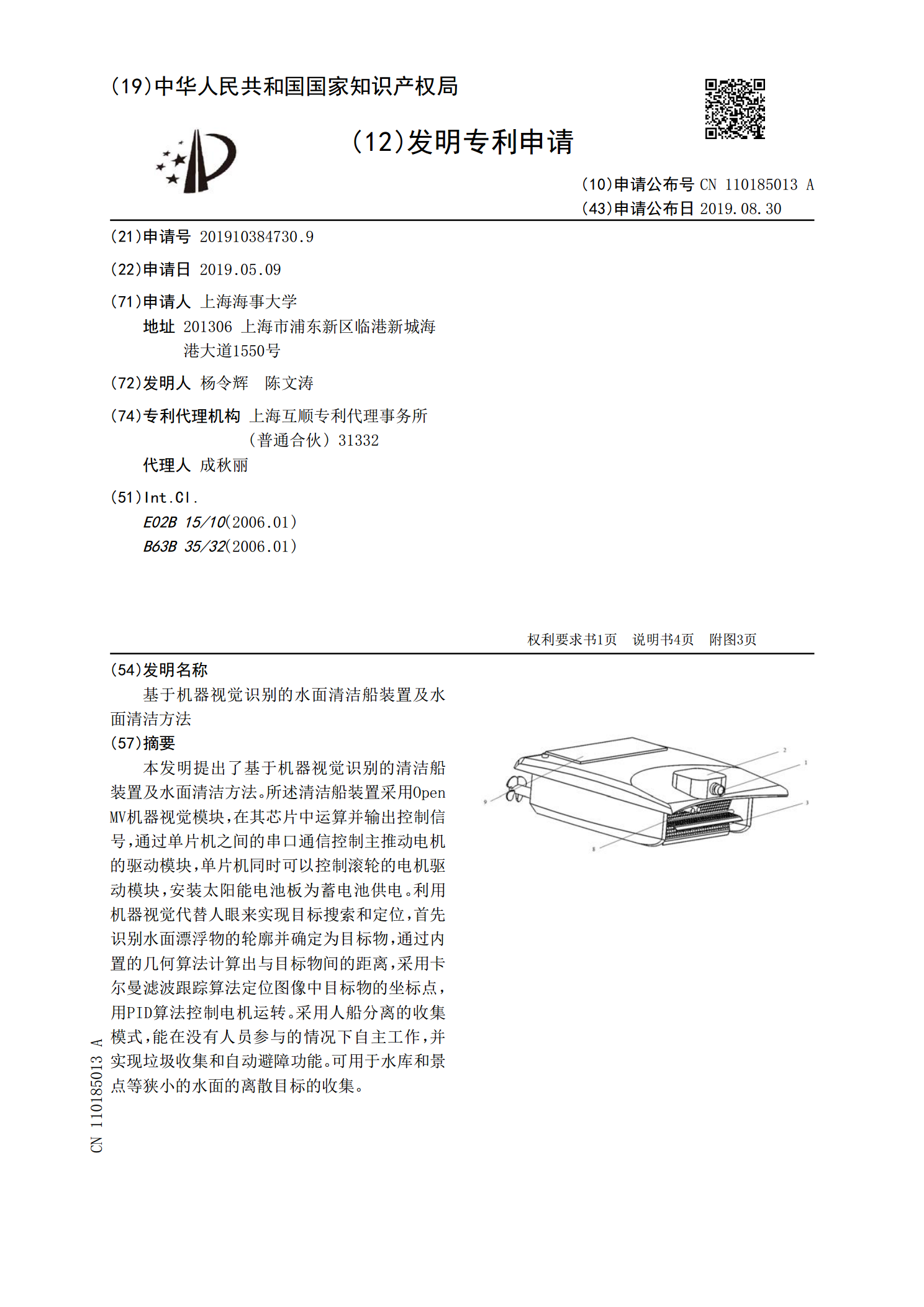
基于机器视觉识别的水面清洁船装置及水面清洁方法.pdf
本发明提出了基于机器视觉识别的清洁船装置及水面清洁方法。所述清洁船装置采用OpenMV机器视觉模块,在其芯片中运算并输出控制信号,通过单片机之间的串口通信控制主推动电机的驱动模块,单片机同时可以控制滚轮的电机驱动模块,安装太阳能电池板为蓄电池供电。利用机器视觉代替人眼来实现目标搜索和定位,首先识别水面漂浮物的轮廓并确定为目标物,通过内置的几何算法计算出与目标物间的距离,采用卡尔曼滤波跟踪算法定位图像中目标物的坐标点,用PID算法控制电机运转。采用人船分离的收集模式,能在没有人员参与的情况下自主工作,并实