
一种基于图像和GNSS的目标空间定位方法.pdf

景山****魔王

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于图像和GNSS的目标空间定位方法.pdf
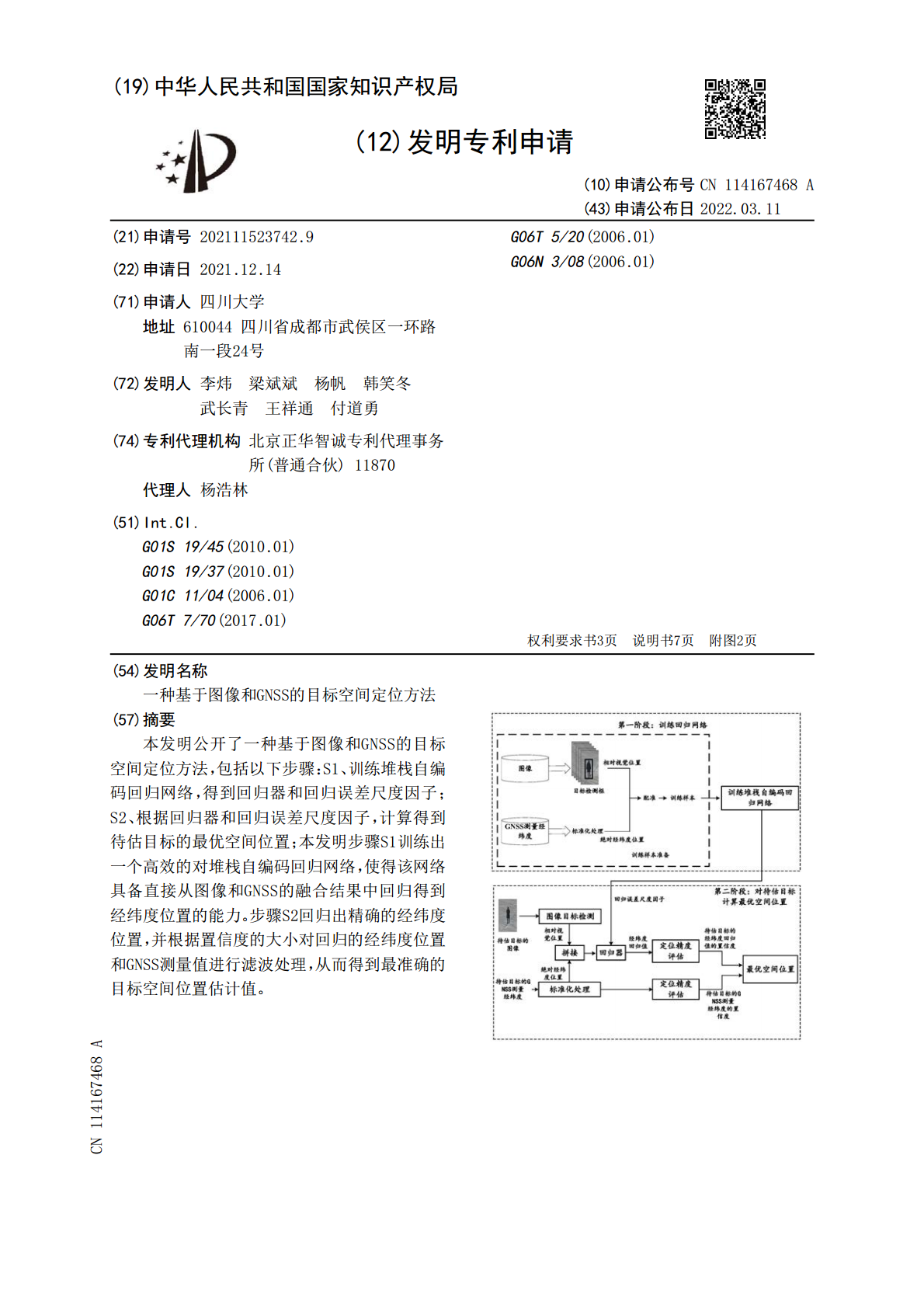
本发明公开了一种基于图像和GNSS的目标空间定位方法,包括以下步骤:S1、训练堆栈自编码回归网络,得到回归器和回归误差尺度因子;S2、根据回归器和回归误差尺度因子,计算得到待估目标的最优空间位置;本发明步骤S1训练出一个高效的对堆栈自编码回归网络,使得该网络具备直接从图像和GNSS的融合结果中回归得到经纬度位置的能力。步骤S2回归出精确的经纬度位置,并根据置信度的大小对回归的经纬度位置和GNSS测量值进行滤波处理,从而得到最准确的目标空间位置估计值。

一种基于星图的空间目标定位方法.docx
一种基于星图的空间目标定位方法摘要本文介绍了一种基于星图的空间目标定位方法。该方法通过使用星座图来确定目标的位置和方向。这种方法对于需要高精度的目标定位非常有效,特别是在相对较小的空间范围内。我们讨论了该方法的原理和实现,并展示了如何使用该方法来定位太空任务中的目标。我们还分析了该方法的优点和局限性,并提出了未来的改进方向。关键词:星图、空间目标、定位方法、太空任务AbstractThispaperintroducesaspacetargetpositioningmethodbasedonstarchar
基于频域相关和空间定位联合的SAR图像实时拼接方法.pdf
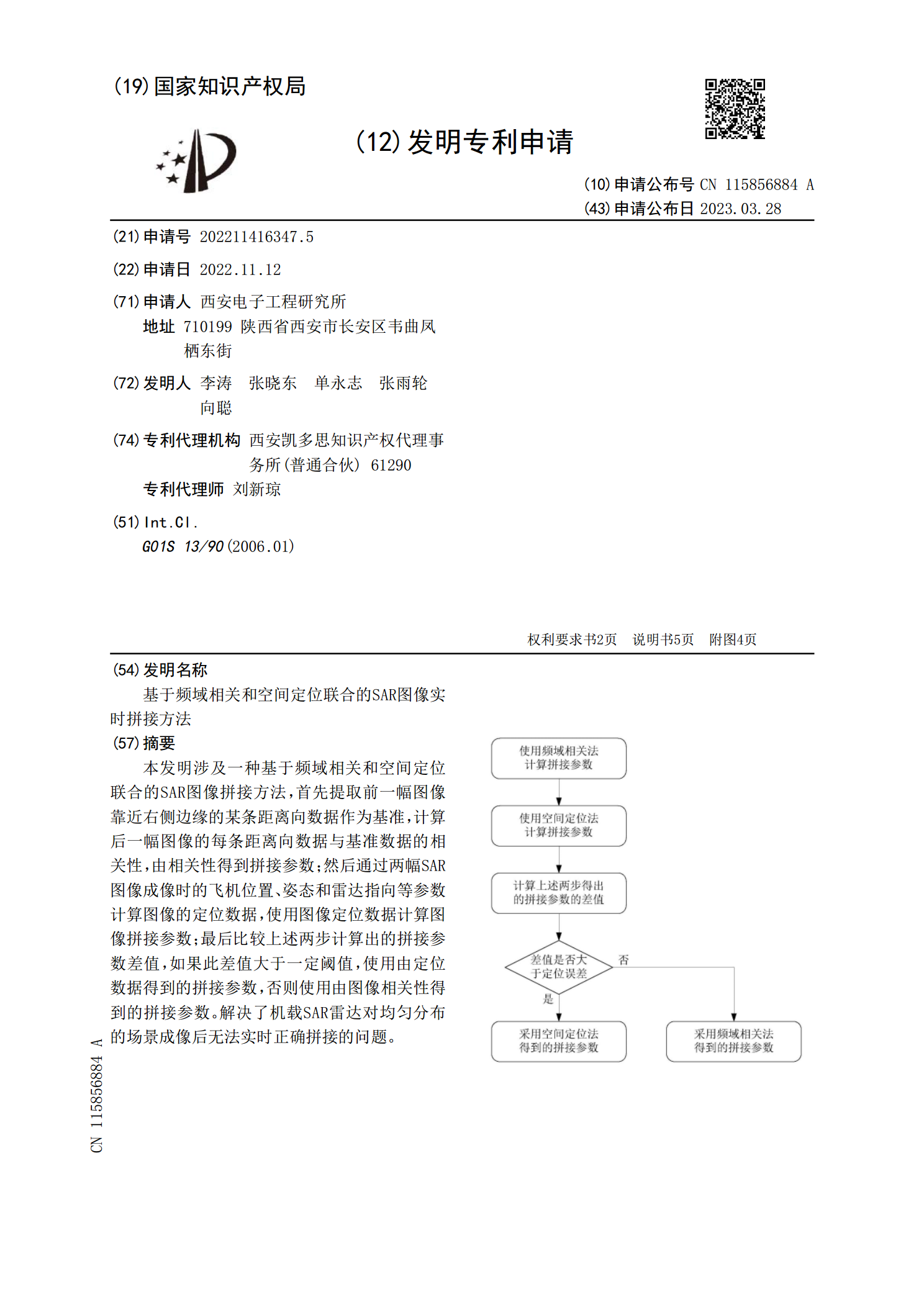
本发明涉及一种基于频域相关和空间定位联合的SAR图像拼接方法,首先提取前一幅图像靠近右侧边缘的某条距离向数据作为基准,计算后一幅图像的每条距离向数据与基准数据的相关性,由相关性得到拼接参数;然后通过两幅SAR图像成像时的飞机位置、姿态和雷达指向等参数计算图像的定位数据,使用图像定位数据计算图像拼接参数;最后比较上述两步计算出的拼接参数差值,如果此差值大于一定阈值,使用由定位数据得到的拼接参数,否则使用由图像相关性得到的拼接参数。解决了机载SAR雷达对均匀分布的场景成像后无法实时正确拼接的问题。

一种基于多视角图像的目标物体定位方法.docx
一种基于多视角图像的目标物体定位方法摘要多视角图像技术已经被广泛应用于目标物体定位、计算机视觉、机器人导航等领域。本文主要介绍了一种基于多视角图像的目标物体定位方法。首先,对多视角图像进行标定,获取视角间的变换关系,然后根据物体的特征点在多个视角图像中进行匹配;接着,通过三维重建,确定目标物体在三维空间中的位置和姿态。最后,通过对物体在不同视角的影像进行合成,可以实现高精度的目标物体定位和跟踪。实验结果表明该方法能够有效提高目标物体定位的精度和鲁棒性。关键词:多视角图像,目标物体定位,特征点匹配,三维重建
一种基于GNSS的塔机吊钩定位方法.pdf
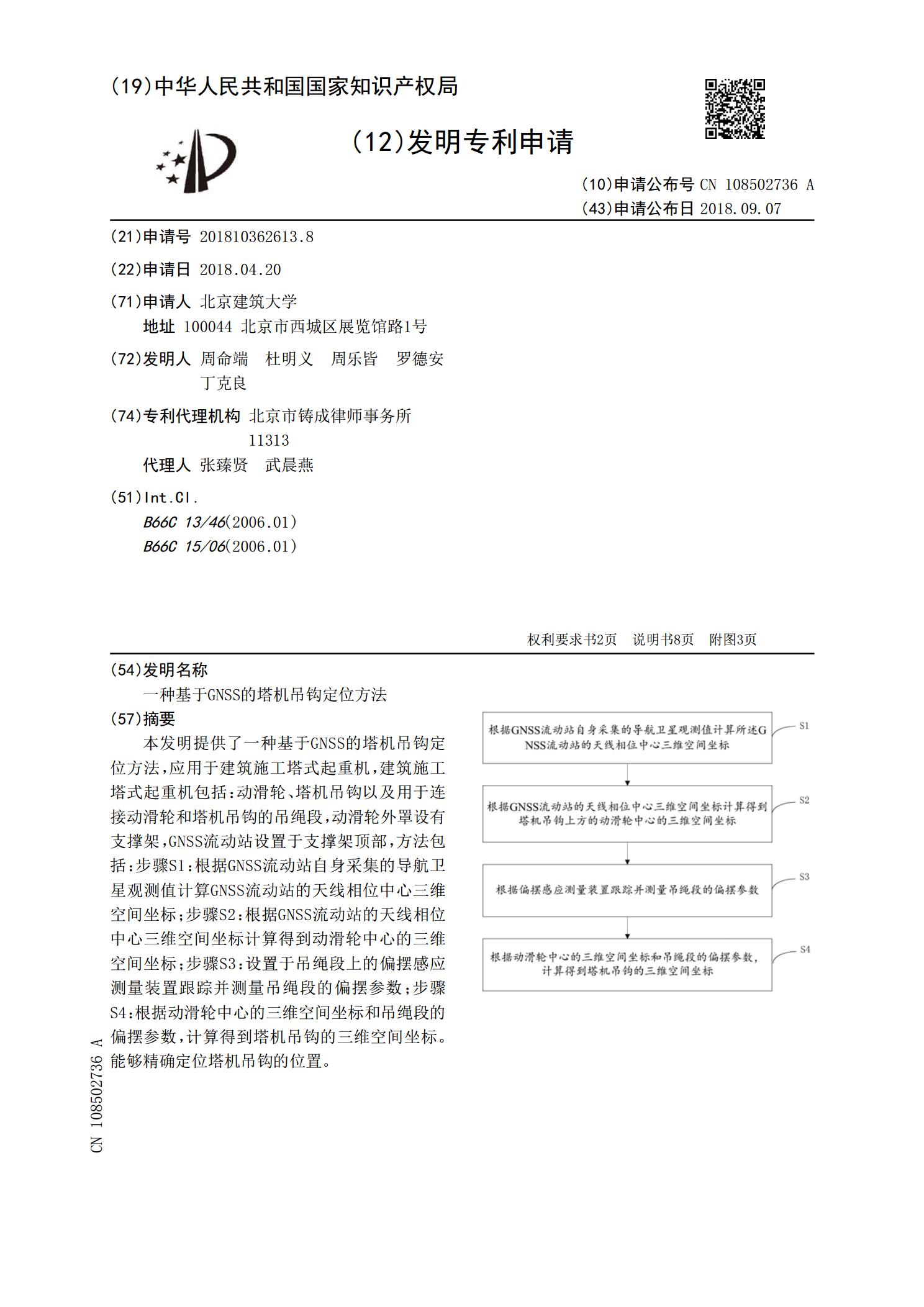
本发明提供了一种基于GNSS的塔机吊钩定位方法,应用于建筑施工塔式起重机,建筑施工塔式起重机包括:动滑轮、塔机吊钩以及用于连接动滑轮和塔机吊钩的吊绳段,动滑轮外罩设有支撑架,GNSS流动站设置于支撑架顶部,方法包括:步骤S1:根据GNSS流动站自身采集的导航卫星观测值计算GNSS流动站的天线相位中心三维空间坐标;步骤S2:根据GNSS流动站的天线相位中心三维空间坐标计算得到动滑轮中心的三维空间坐标;步骤S3:设置于吊绳段上的偏摆感应测量装置跟踪并测量吊绳段的偏摆参数;步骤S4:根据动滑轮中心的三维空间坐标