
一种电动汽车的SMC蠕行控制.pdf

雨星****萌娃

1/7
2/7

3/7

4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电动汽车的SMC蠕行控制.pdf
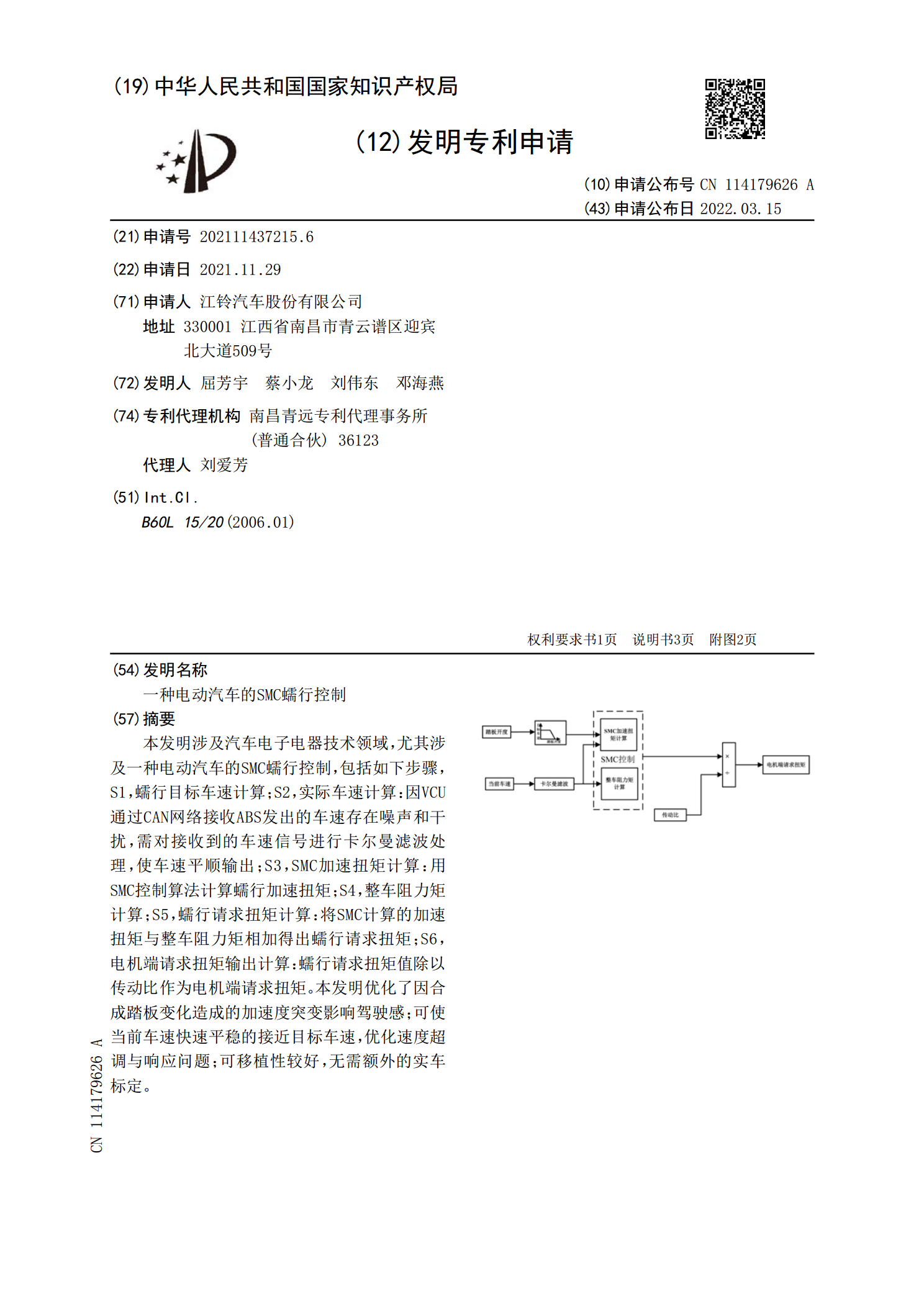
本发明涉及汽车电子电器技术领域,尤其涉及一种电动汽车的SMC蠕行控制,包括如下步骤,S1,蠕行目标车速计算;S2,实际车速计算:因VCU通过CAN网络接收ABS发出的车速存在噪声和干扰,需对接收到的车速信号进行卡尔曼滤波处理,使车速平顺输出;S3,SMC加速扭矩计算:用SMC控制算法计算蠕行加速扭矩;S4,整车阻力矩计算;S5,蠕行请求扭矩计算:将SMC计算的加速扭矩与整车阻力矩相加得出蠕行请求扭矩;S6,电机端请求扭矩输出计算:蠕行请求扭矩值除以传动比作为电机端请求扭矩。本发明优化了因合成踏板变化造成的
一种电动汽车驻坡、蠕行、蠕行限速控制方法.pdf
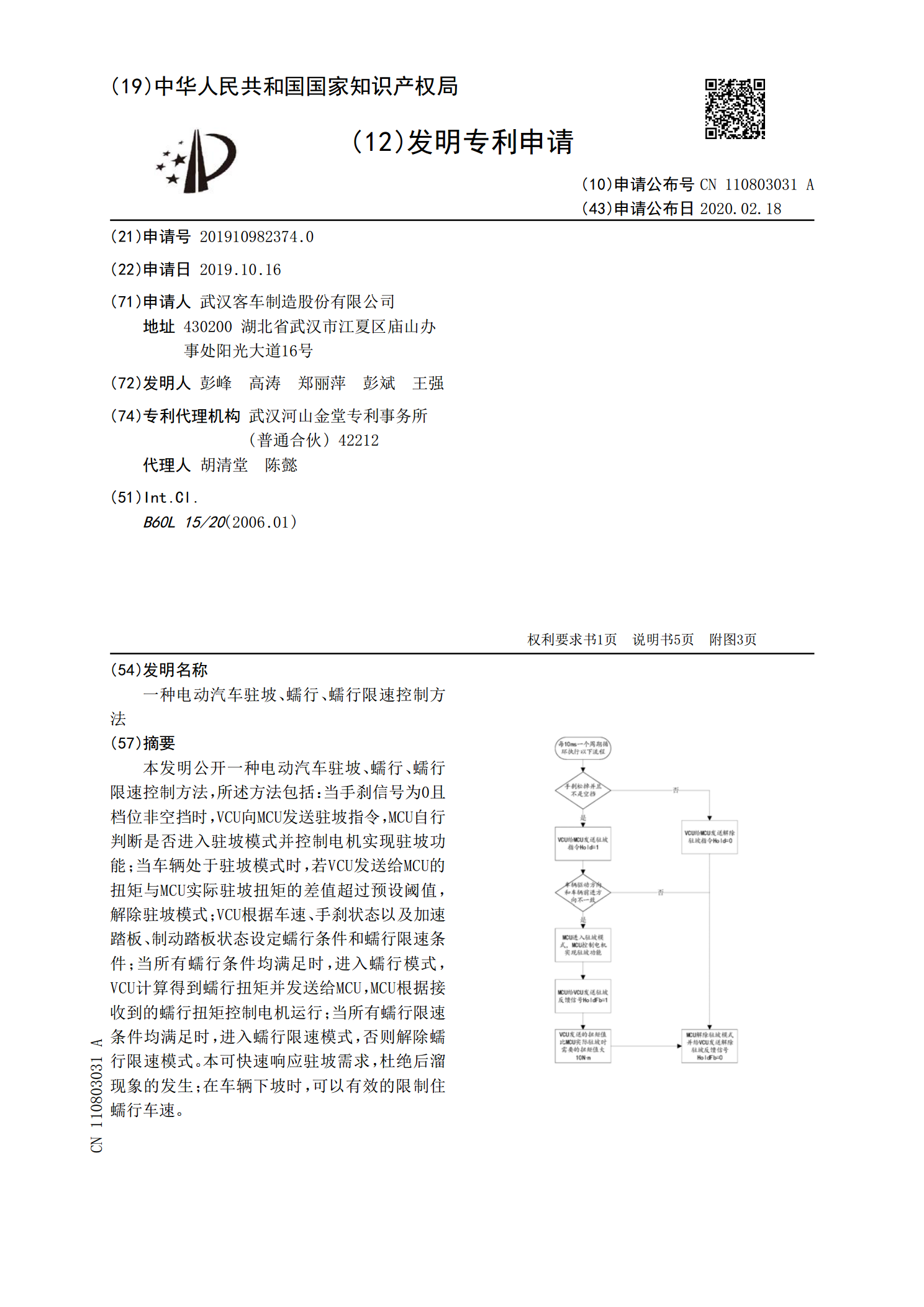
本发明公开一种电动汽车驻坡、蠕行、蠕行限速控制方法,所述方法包括:当手刹信号为0且档位非空挡时,VCU向MCU发送驻坡指令,MCU自行判断是否进入驻坡模式并控制电机实现驻坡功能;当车辆处于驻坡模式时,若VCU发送给MCU的扭矩与MCU实际驻坡扭矩的差值超过预设阈值,解除驻坡模式;VCU根据车速、手刹状态以及加速踏板、制动踏板状态设定蠕行条件和蠕行限速条件;当所有蠕行条件均满足时,进入蠕行模式,VCU计算得到蠕行扭矩并发送给MCU,MCU根据接收到的蠕行扭矩控制电机运行;当所有蠕行限速条件均满足时,进入蠕行

一种电动汽车基于闭环的蠕行控制方法.pdf
一种电动汽车基于闭环的蠕行控制方法,其包含步骤:1.基于踏板开度计算目标车速:所述踏板开度是制动踏板开度和加速踏板开度合成的开度值,通过该合成的踏板开度值查表得到目标车速;2.基于速差计算目标加速度:通过目标车速与实际车速的差值查表得到目标加速度,此目标加速度应满足蠕行驾驶性要求;3.基于目标加速度计算蠕行加速所需轮边扭矩;4.基于实际加速度计算蠕行拖滞力:该实际加速度是通过实际车速利用最小二乘法计算得到;5.基于拖滞力计算蠕行扭矩:蠕行扭矩等于拖滞力加上加速轮边扭矩。整车的蠕行可以适应各种复杂路况和工况
一种电动汽车自适应蠕行控制方法.pdf
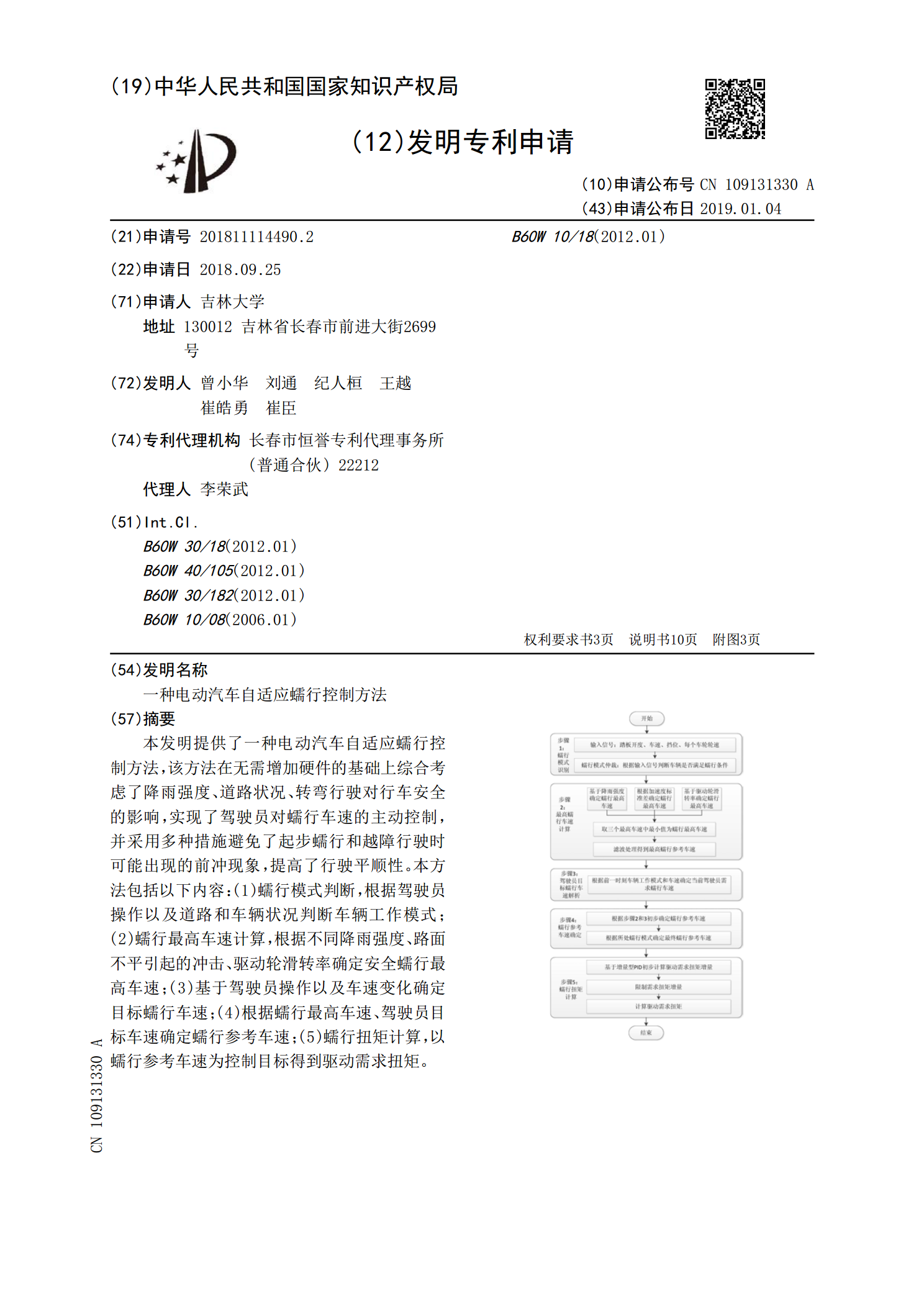
本发明提供了一种电动汽车自适应蠕行控制方法,该方法在无需增加硬件的基础上综合考虑了降雨强度、道路状况、转弯行驶对行车安全的影响,实现了驾驶员对蠕行车速的主动控制,并采用多种措施避免了起步蠕行和越障行驶时可能出现的前冲现象,提高了行驶平顺性。本方法包括以下内容:(1)蠕行模式判断,根据驾驶员操作以及道路和车辆状况判断车辆工作模式;(2)蠕行最高车速计算,根据不同降雨强度、路面不平引起的冲击、驱动轮滑转率确定安全蠕行最高车速;(3)基于驾驶员操作以及车速变化确定目标蠕行车速;(4)根据蠕行最高车速、驾驶员目标
一种抑制电动汽车蠕行起步抖动的控制方法.pdf
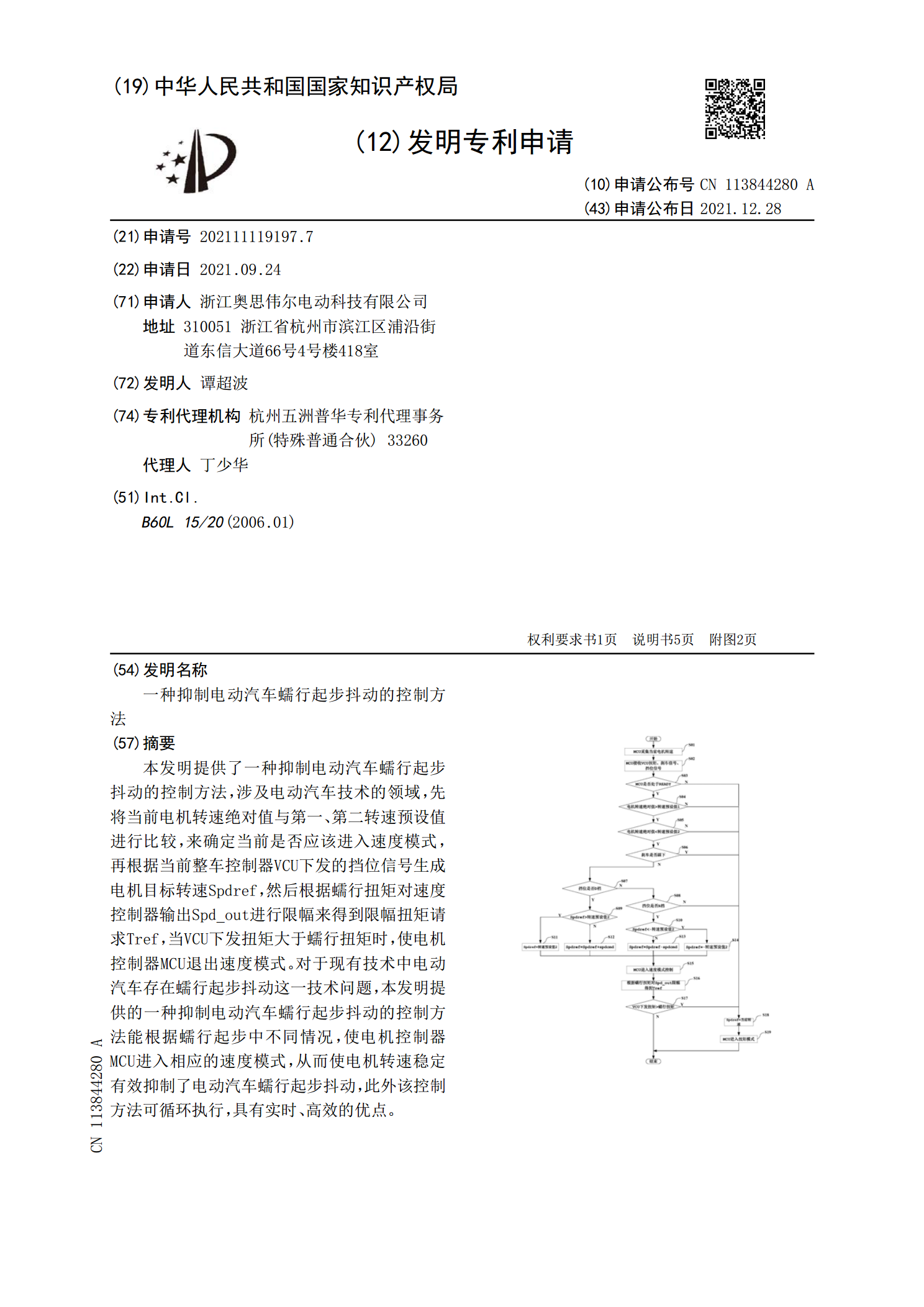
本发明提供了一种抑制电动汽车蠕行起步抖动的控制方法,涉及电动汽车技术的领域,先将当前电机转速绝对值与第一、第二转速预设值进行比较,来确定当前是否应该进入速度模式,再根据当前整车控制器VCU下发的挡位信号生成电机目标转速Spdref,然后根据蠕行扭矩对速度控制器输出Spd_out进行限幅来得到限幅扭矩请求Tref,当VCU下发扭矩大于蠕行扭矩时,使电机控制器MCU退出速度模式。对于现有技术中电动汽车存在蠕行起步抖动这一技术问题,本发明提供的一种抑制电动汽车蠕行起步抖动的控制方法能根据蠕行起步中不同情况,使电