
一种锚杆台车自动化控制系统及锚杆台车.pdf

音景****ka


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种锚杆台车自动化控制系统及锚杆台车.pdf
本发明提出一种锚杆台车自动化控制系统及锚杆台车,属于隧道施工技术领域。上位机下发目标位置给臂架控制单元,臂架控制单元根据机械臂各关节处传感器采集到的数据,计算得出机械臂各关节在目标位置的长度和角度,采用位置环PID和速度环PID构成的双PID环控制液压阀门实现机械臂自动定位;在机械臂自动定位后,依据机头传感器采集到的数据,控制钻孔组件、注浆组件和锚杆组件实现自动钻孔、自动注浆和自动锚杆。本发明通过把机械臂传感器数据和机头传感器数据直接上传给臂架控制单元进行运算,得到计算结果直接下发给阀控制单元实现机械臂的

锚杆台车的锚杆库.pdf
本实用新型提供了锚杆台车的锚杆库,它包括底座,底座的侧边平行固定有支撑立柱,支撑立柱的顶端固定有轴承座,轴承座之间转动安装有主轴,主轴的两端平行固定有用于对锚杆进行卡紧的第一齿盘和第二齿盘,第一齿盘与用于驱动其转动的转动装置配合相连;第一齿盘的外侧面布置安装有用于对锚杆的尾部进行限位支撑的弧形存储盘,第二齿盘所在侧布置安装有用于对锚杆头部进行限位的扇形限位环。此锚杆库能够搭载在锚杆台车上,用于存储大批量的锚杆,便于锚杆台车实现锚杆施工,而且保证了后续能够快速的实现锚杆的取出。
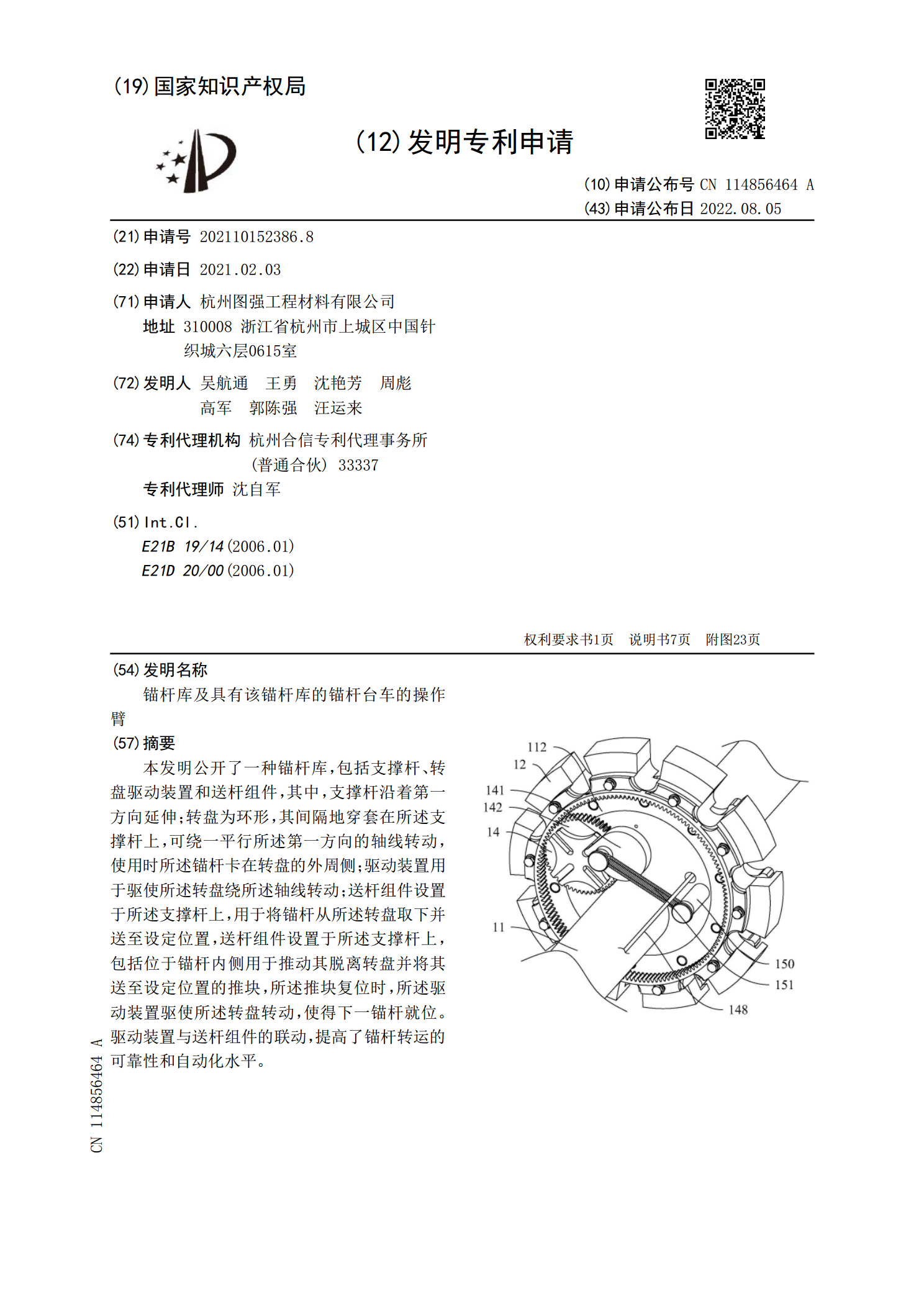
锚杆库及具有该锚杆库的锚杆台车的操作臂.pdf
本发明公开了一种锚杆库,包括支撑杆、转盘驱动装置和送杆组件,其中,支撑杆沿着第一方向延伸;转盘为环形,其间隔地穿套在所述支撑杆上,可绕一平行所述第一方向的轴线转动,使用时所述锚杆卡在转盘的外周侧;驱动装置用于驱使所述转盘绕所述轴线转动;送杆组件设置于所述支撑杆上,用于将锚杆从所述转盘取下并送至设定位置,送杆组件设置于所述支撑杆上,包括位于锚杆内侧用于推动其脱离转盘并将其送至设定位置的推块,所述推块复位时,所述驱动装置驱使所述转盘转动,使得下一锚杆就位。驱动装置与送杆组件的联动,提高了锚杆转运的可靠性和自动
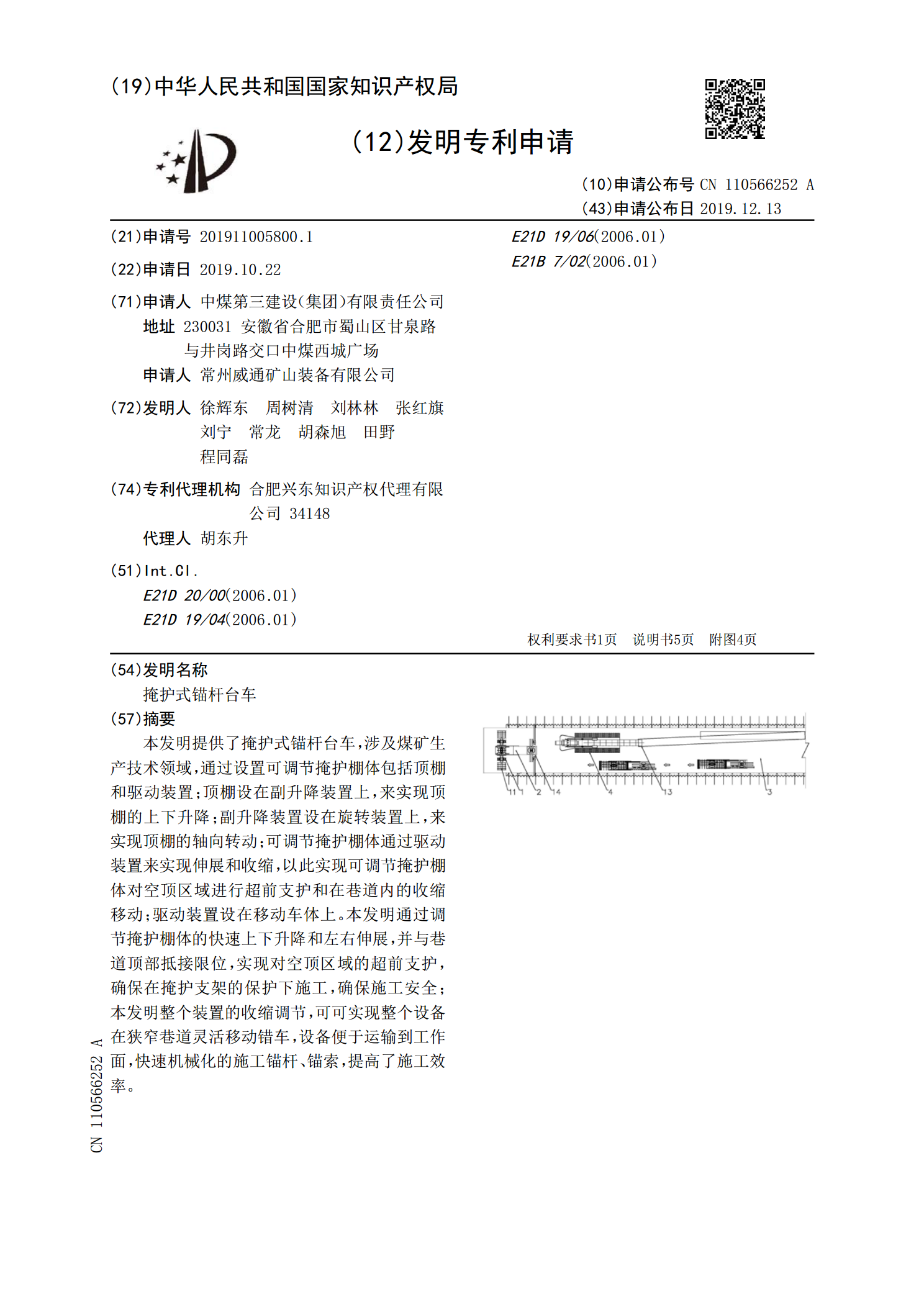
掩护式锚杆台车.pdf
本发明提供了掩护式锚杆台车,涉及煤矿生产技术领域,通过设置可调节掩护棚体包括顶棚和驱动装置;顶棚设在副升降装置上,来实现顶棚的上下升降;副升降装置设在旋转装置上,来实现顶棚的轴向转动;可调节掩护棚体通过驱动装置来实现伸展和收缩,以此实现可调节掩护棚体对空顶区域进行超前支护和在巷道内的收缩移动;驱动装置设在移动车体上。本发明通过调节掩护棚体的快速上下升降和左右伸展,并与巷道顶部抵接限位,实现对空顶区域的超前支护,确保在掩护支架的保护下施工,确保施工安全;本发明整个装置的收缩调节,可可实现整个设备在狭窄巷道灵

自动送杆的锚杆库及具有该锚杆库的锚杆台车的操作臂.pdf
本发明公开了一种自动送杆的锚杆库,包括支撑杆、转盘和送杆组件,其中,支撑杆沿着第一方向延伸;环形的转盘为若干个,间隔地穿套在所述支撑杆上,可绕一平行所述第一方向的轴线转动,使用时所述锚杆卡在转盘的外周侧;送杆组件安装在所述支撑杆上,包括设置于所述锚杆内侧并可沿转盘径向推动锚杆使其脱离转盘的推块,所述推块具有磁性,在锚杆脱离转盘后通过磁吸限制所述锚杆。送杆组件依靠顶推来转运锚杆,因此,设置在转盘内部,节省了锚杆库的体积,缩小了锚杆库与推进梁的安装距离,减小了振动带来的影响。且拾取固定锚杆的方式为磁性吸合,省