
一种自动驾驶策略生成方法及系统.pdf

一条****然后


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动驾驶策略生成方法及系统.pdf
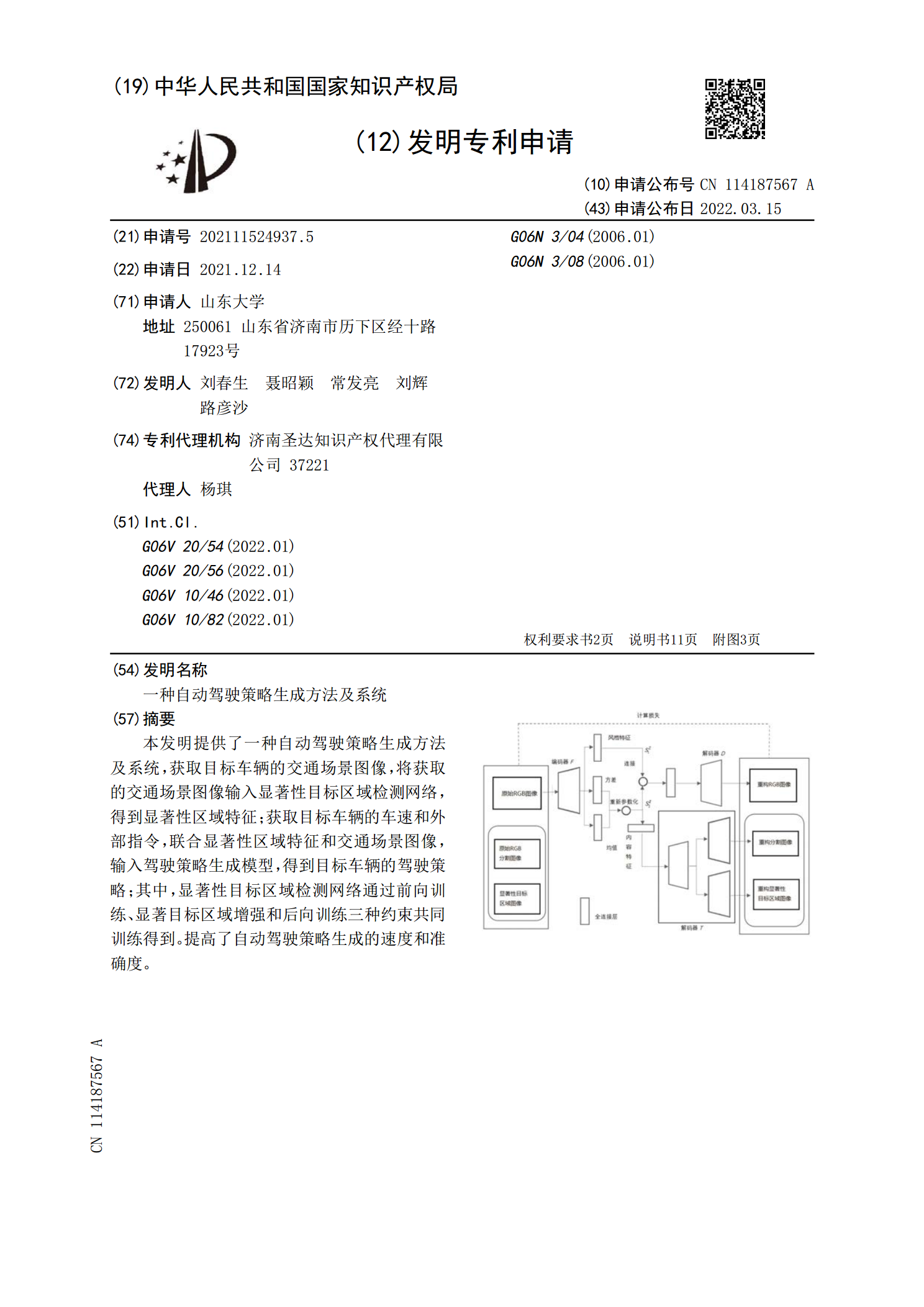
本发明提供了一种自动驾驶策略生成方法及系统,获取目标车辆的交通场景图像,将获取的交通场景图像输入显著性目标区域检测网络,得到显著性区域特征;获取目标车辆的车速和外部指令,联合显著性区域特征和交通场景图像,输入驾驶策略生成模型,得到目标车辆的驾驶策略;其中,显著性目标区域检测网络通过前向训练、显著目标区域增强和后向训练三种约束共同训练得到。提高了自动驾驶策略生成的速度和准确度。
一种面向自动驾驶系统的仿真测试场景生成方法.pdf
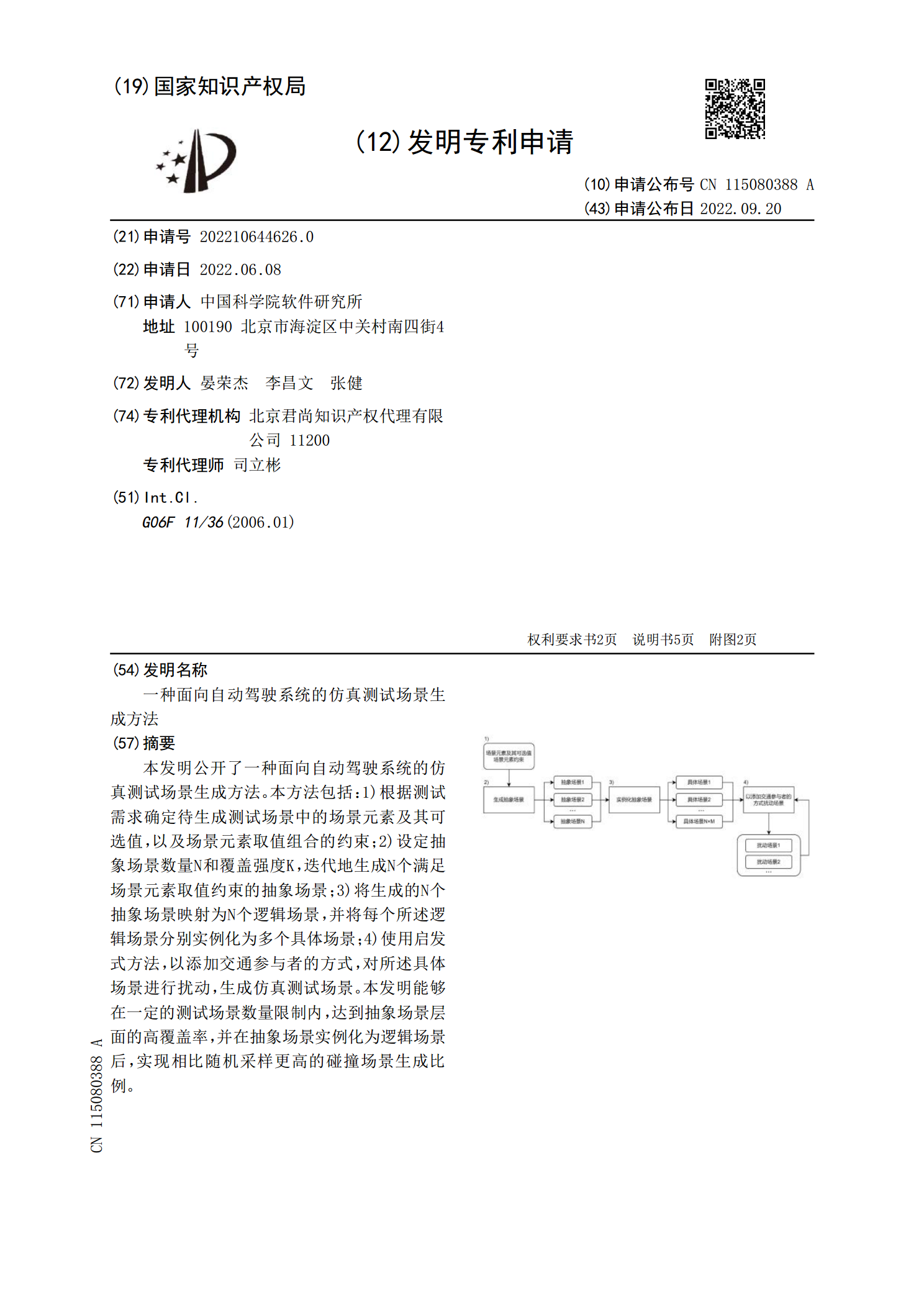
本发明公开了一种面向自动驾驶系统的仿真测试场景生成方法。本方法包括:1)根据测试需求确定待生成测试场景中的场景元素及其可选值,以及场景元素取值组合的约束;2)设定抽象场景数量N和覆盖强度K,迭代地生成N个满足场景元素取值约束的抽象场景;3)将生成的N个抽象场景映射为N个逻辑场景,并将每个所述逻辑场景分别实例化为多个具体场景;4)使用启发式方法,以添加交通参与者的方式,对所述具体场景进行扰动,生成仿真测试场景。本发明能够在一定的测试场景数量限制内,达到抽象场景层面的高覆盖率,并在抽象场景实例化为逻辑场景后,

一种自动驾驶方法及系统.pdf
本发明提供了一种自动驾驶方法及系统,首先获取机动车车体参数、机动车车速与机动车最佳转向角间的对应关系并存储所述对应关系;当最优机动策略为车道切换、超车和转向行驶机动操作时调整机动车行驶状态至理想状态;之后获取机动车车速和机动车前后轮轴距;将机动车车速与所述对应关系进行比对,获取机动车最佳转向角;根据机动车最佳转向角和机动车前后轮轴距,获取机动车转弯半径;最后根据机动车最佳转向角和机动车转弯半径即可规划出车道切换路径轨迹。因此,本发明提供了一种能够根据最优机动策略准确规划出机动车在自动驾驶状态下的车道切换路

一种自动驾驶仿真数据生成方法.pdf
本发明公开了一种自动驾驶仿真数据生成方法。首先,对没有车辆的道路图像进行可行驶车道标注后,通过相机参数进行反向投影获得世界坐标系中的可行驶车道。通过可行驶车道对点云数据进行筛选,利用筛选过后的点云集合拟合出真实路面方程,从车辆3D模型库中选取车辆模型放置到真实路面,根据路面方程对车辆角度进行调整。从灯光库中选取不同的灯光信息后,便可利用blender进行渲染得到高真实度的前景图像与蒙版信息。通过风格和谐化模型,以背景图像作为参考,对前景图像进行风格和谐化操作,最后利用蒙版信息将前景图像与背景图像进行贴图操
自动驾驶场景生成方法.pdf
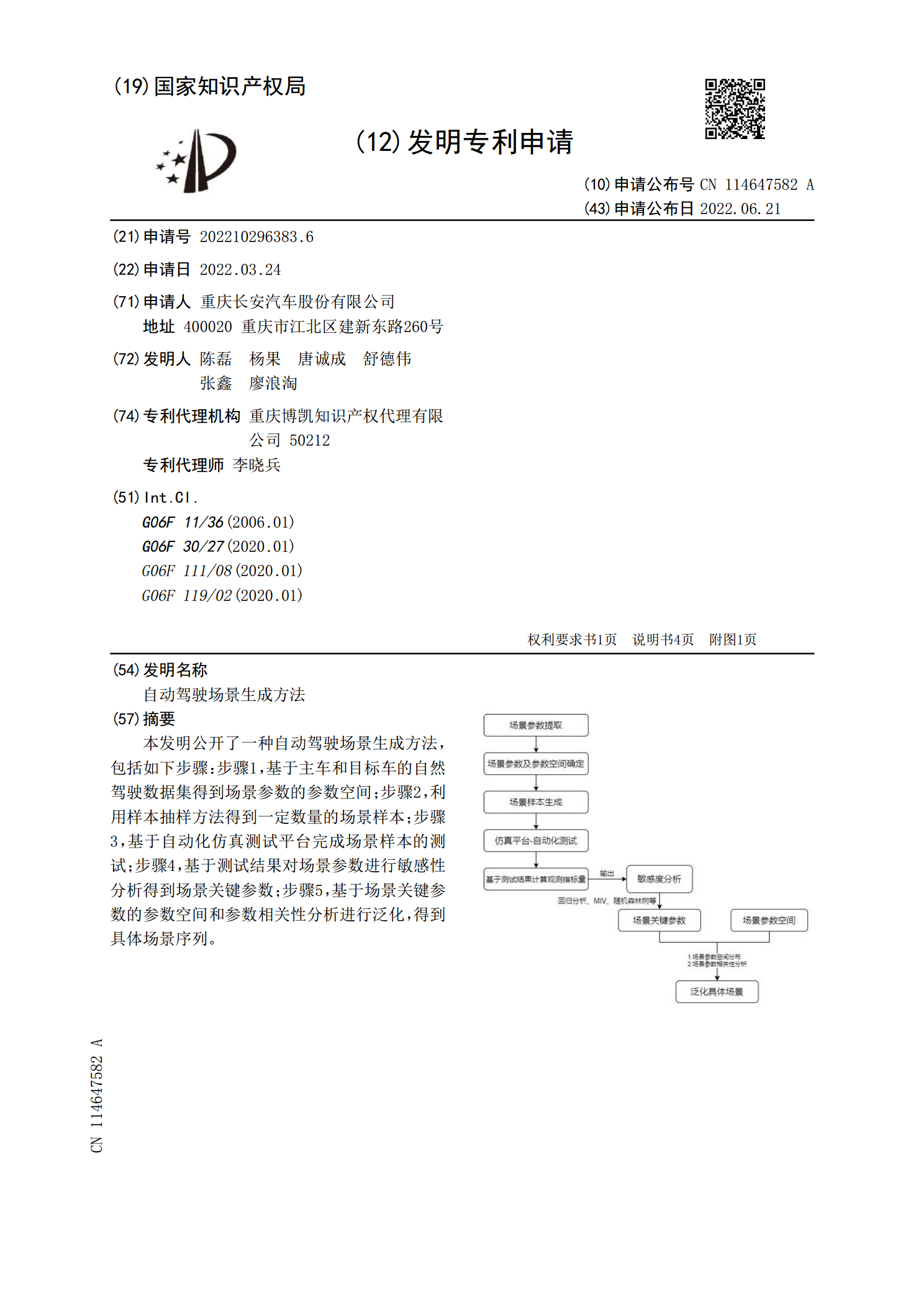
本发明公开了一种自动驾驶场景生成方法,包括如下步骤:步骤1,基于主车和目标车的自然驾驶数据集得到场景参数的参数空间;步骤2,利用样本抽样方法得到一定数量的场景样本;步骤3,基于自动化仿真测试平台完成场景样本的测试;步骤4,基于测试结果对场景参数进行敏感性分析得到场景关键参数;步骤5,基于场景关键参数的参数空间和参数相关性分析进行泛化,得到具体场景序列。