
基于改进四叉树ORB算法的双目测距方法.pdf

是你****平呀

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进四叉树ORB算法的双目测距方法.pdf
本发明提供了一种基于改进四叉树ORB算法的双目测距方法。该方法包括如下步骤:首先通过标定板拟合深度与视差的关系;之后采集图像并预处理;接着通过四叉树分解算法来精简检索域,剔除背景区域;特征点检测是采用FAST算法和Kitchen‑Rosenfeld算法同时进行,并采用四叉树均匀化算法细分特征点;再使用BRIEF特征描述来匹配左右照片的特征点,同时使用Ransac算法去除错误匹配;最后通过三角测量原理恢复特征点坐标,根据空间距离公式计算物体尺寸。本发明通过将改进的四叉树ORB匹配算法应用于双目测距当中,并使

基于改进的ORB算法的图像匹配算法.pdf
本发明公开了一种基于改进的ORB算法的图像匹配算法,本方法通过AGAST算法对目标图像和对比图像产生一组搜索树,执行后向归纳算法得到平面区域决策树和复杂区域决策树;通过比对决策树内像素点特征得到特征点;确定特征点主方向并使主方向旋转到0度;采用BRIEF算法对特征点构建特征向量;采用多探针局部敏感哈希算法将特征向量映射到不同的哈希桶中,并按探测序列比对不同哈希桶中的特征向量,得到初始匹配对;调用RANSAC算法函数对初始匹配对进行误匹配剔除,得到精准的图像匹配结果。本算法通过对特征点提取和匹配,得到粗略匹
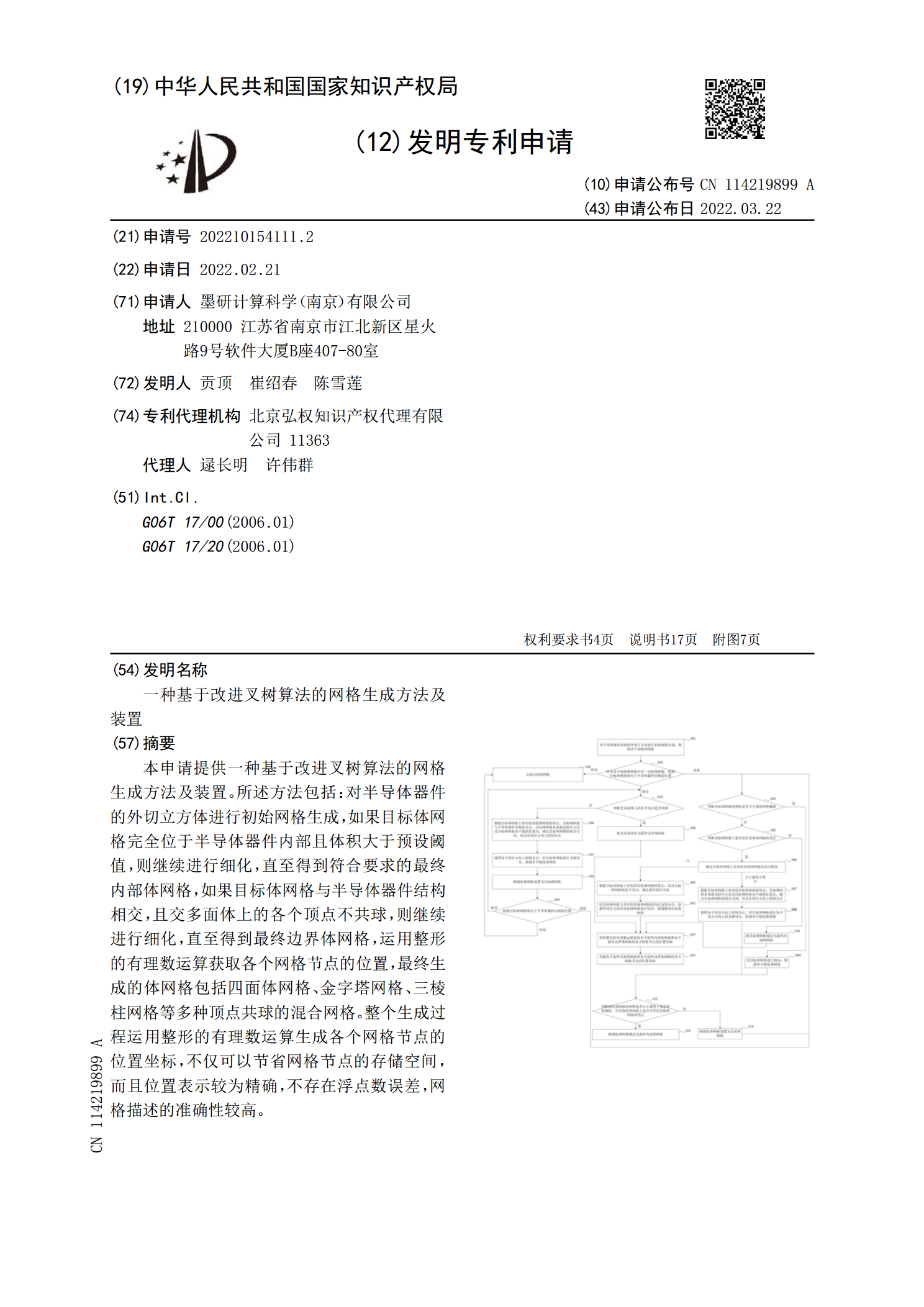
一种基于改进叉树算法的网格生成方法及装置.pdf
本申请提供一种基于改进叉树算法的网格生成方法及装置。所述方法包括:对半导体器件的外切立方体进行初始网格生成,如果目标体网格完全位于半导体器件内部且体积大于预设阈值,则继续进行细化,直至得到符合要求的最终内部体网格,如果目标体网格与半导体器件结构相交,且交多面体上的各个顶点不共球,则继续进行细化,直至得到最终边界体网格,运用整形的有理数运算获取各个网格节点的位置,最终生成的体网格包括四面体网格、金字塔网格、三棱柱网格等多种顶点共球的混合网格。整个生成过程运用整形的有理数运算生成各个网格节点的位置坐标,不仅可

基于线性四叉树的快速邻域查询算法优化研究.doc
基于线性四叉树的快速邻域查询算法优化研究伴随着地理信息系统研究的不断深入,位置服务系统得到了越来越广泛的发展与应用。由于空间数据固有的海量性和复杂性使得传统的数据库查询技术越来越难以发挥其应有的作用,空间数据查询技术亟需发展与创新。空间数据的庞大与繁杂表明了一个数据库性能的优劣决定性因素在于查询的效率。目前较为常用的邻域查询方法多是把已知对象与所查对象抽象成空间中的一个点或者一块方形区域,从而来简化实际目标对象物理形状的不规则性,而基于线性四叉树快速邻域查询技术正是以此为基础来展开研究的。由于此方法还处于
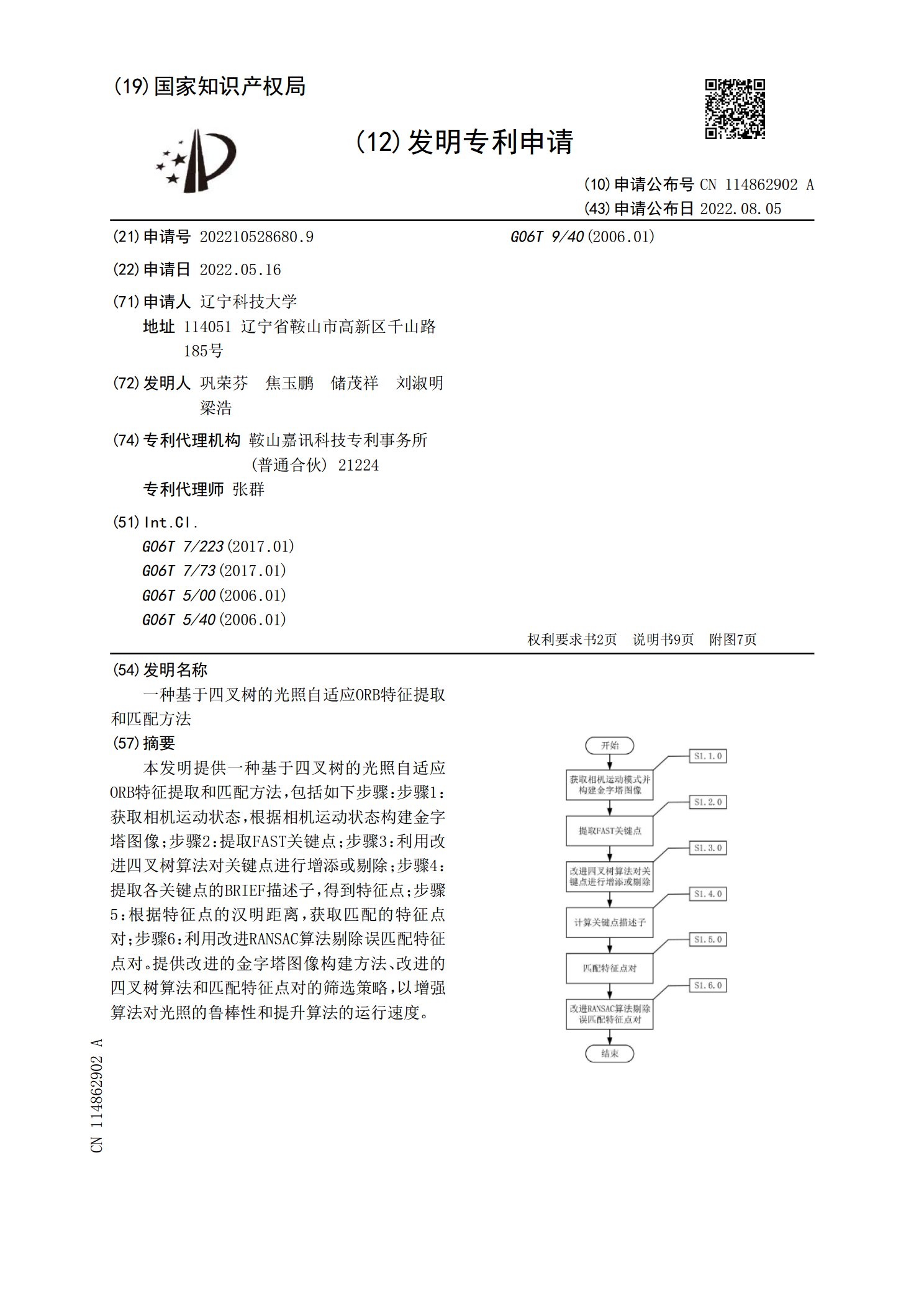
一种基于四叉树的光照自适应ORB特征提取和匹配方法.pdf
本发明提供一种基于四叉树的光照自适应ORB特征提取和匹配方法,包括如下步骤:步骤1:获取相机运动状态,根据相机运动状态构建金字塔图像;步骤2:提取FAST关键点;步骤3:利用改进四叉树算法对关键点进行增添或剔除;步骤4:提取各关键点的BRIEF描述子,得到特征点;步骤5:根据特征点的汉明距离,获取匹配的特征点对;步骤6:利用改进RANSAC算法剔除误匹配特征点对。提供改进的金字塔图像构建方法、改进的四叉树算法和匹配特征点对的筛选策略,以增强算法对光照的鲁棒性和提升算法的运行速度。