
双基地MIMO雷达中一种高精度的多参数联合估计方法.pdf

一吃****昕靓


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双基地MIMO雷达中一种高精度的多参数联合估计方法.pdf
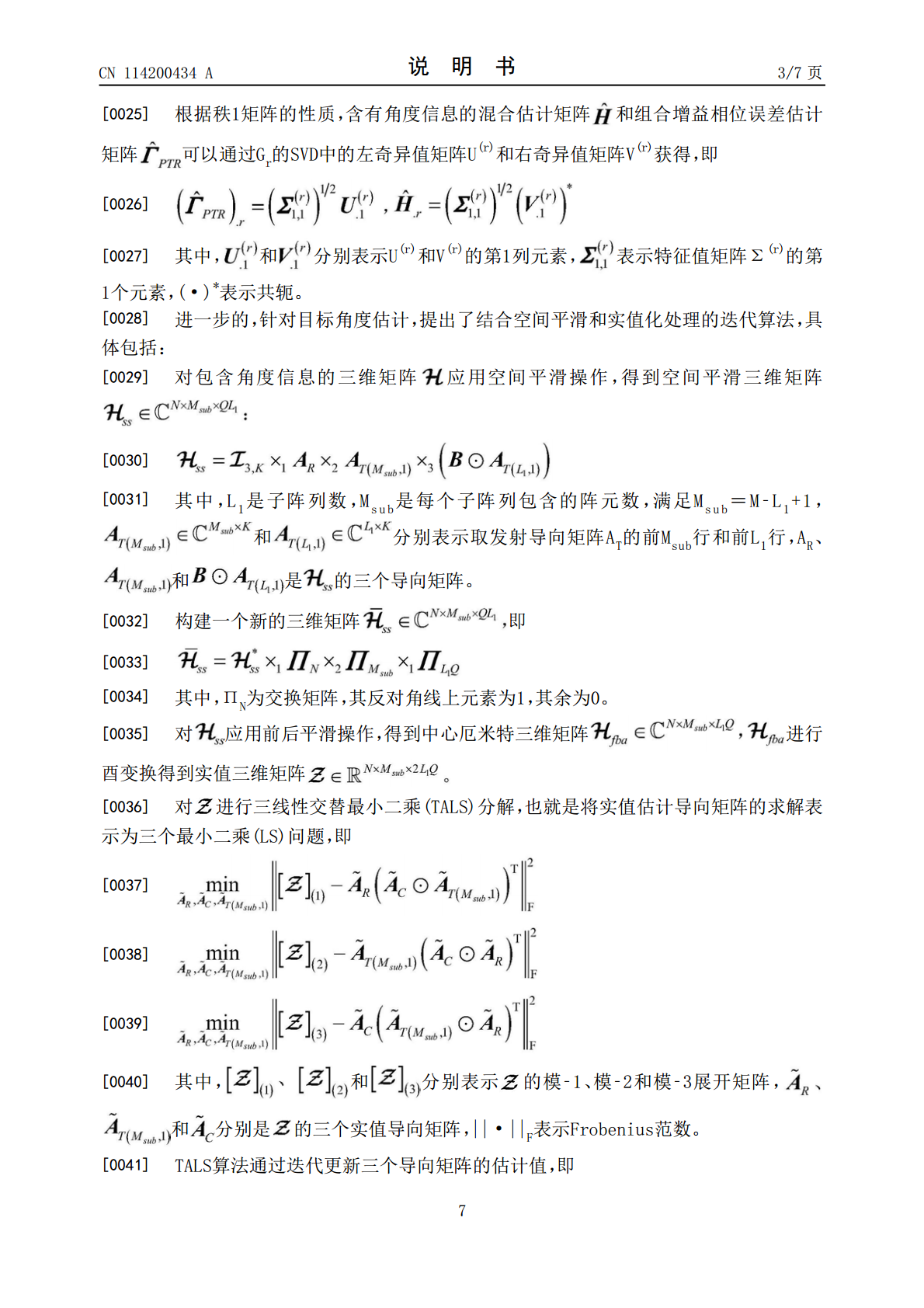
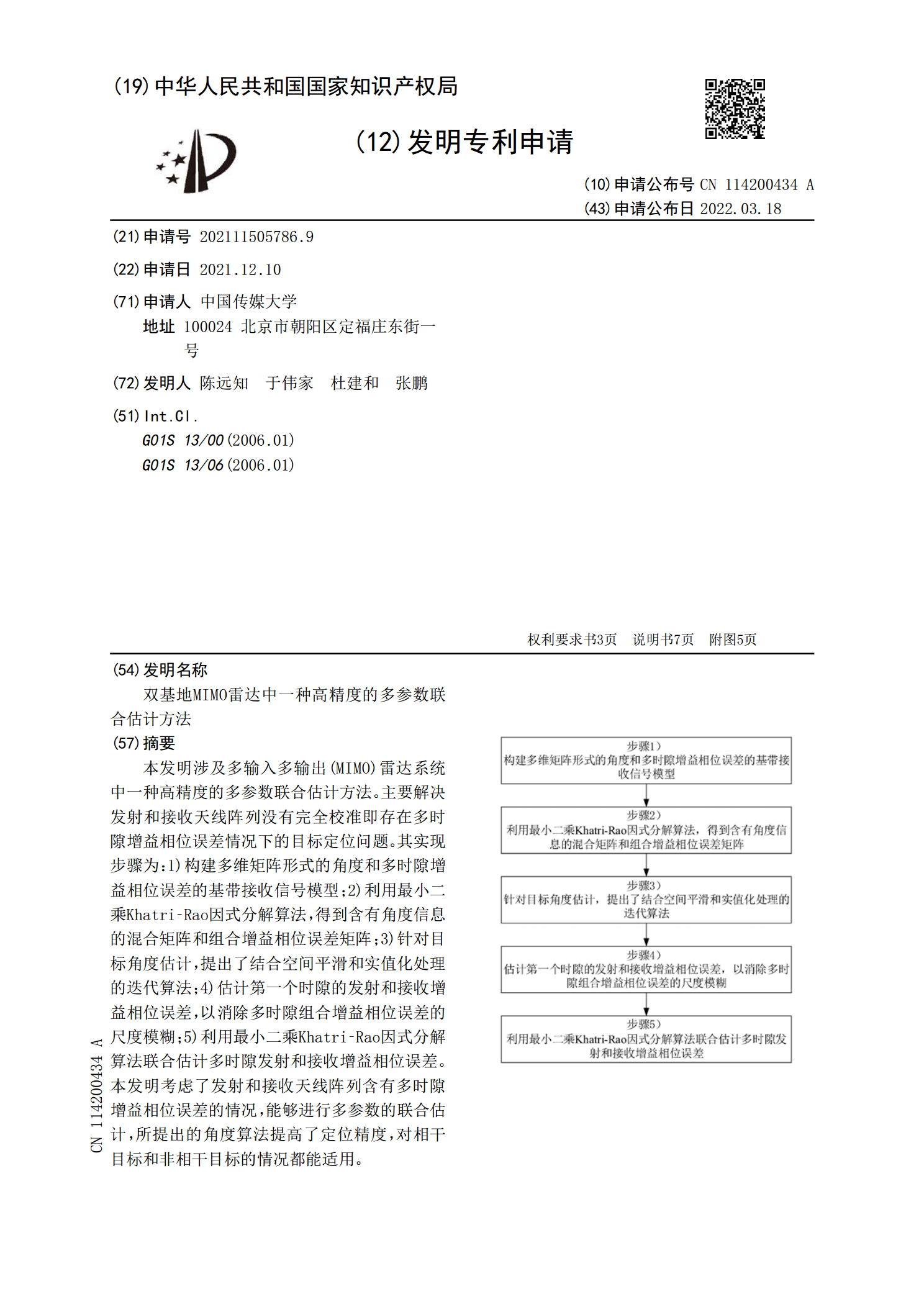
本发明涉及多输入多输出(MIMO)雷达系统中一种高精度的多参数联合估计方法。主要解决发射和接收天线阵列没有完全校准即存在多时隙增益相位误差情况下的目标定位问题。其实现步骤为:1)构建多维矩阵形式的角度和多时隙增益相位误差的基带接收信号模型;2)利用最小二乘Khatri‑Rao因式分解算法,得到含有角度信息的混合矩阵和组合增益相位误差矩阵;3)针对目标角度估计,提出了结合空间平滑和实值化处理的迭代算法;4)估计第一个时隙的发射和接收增益相位误差,以消除多时隙组合增益相位误差的尺度模糊;5)利用最小二乘Kha

双基地MIMO雷达收发角和多普勒频率参数的联合估计方法.docx
双基地MIMO雷达收发角和多普勒频率参数的联合估计方法双基地MIMO雷达收发角和多普勒频率参数的联合估计方法摘要:随着雷达技术的发展,双基地MIMO雷达系统在目标检测和定位方面具有独特的优势。双基地MIMO雷达系统由于具有多个(Nt)天线对于发射和接收信号空间的自由度,能够提供更高的分辨力和更低的误报率。然而,由于发射和接收节点之间的通信链路会受到路径损耗、多径传播和信号衰减等因素的影响,导致收发角和多普勒频率参数的估计面临一定的困难。本文提出了一种联合估计方法,通过使用混合波束形成技术和时间差分技术,考
双基地MIMO雷达中一种基于张量的角度估计方法.pdf
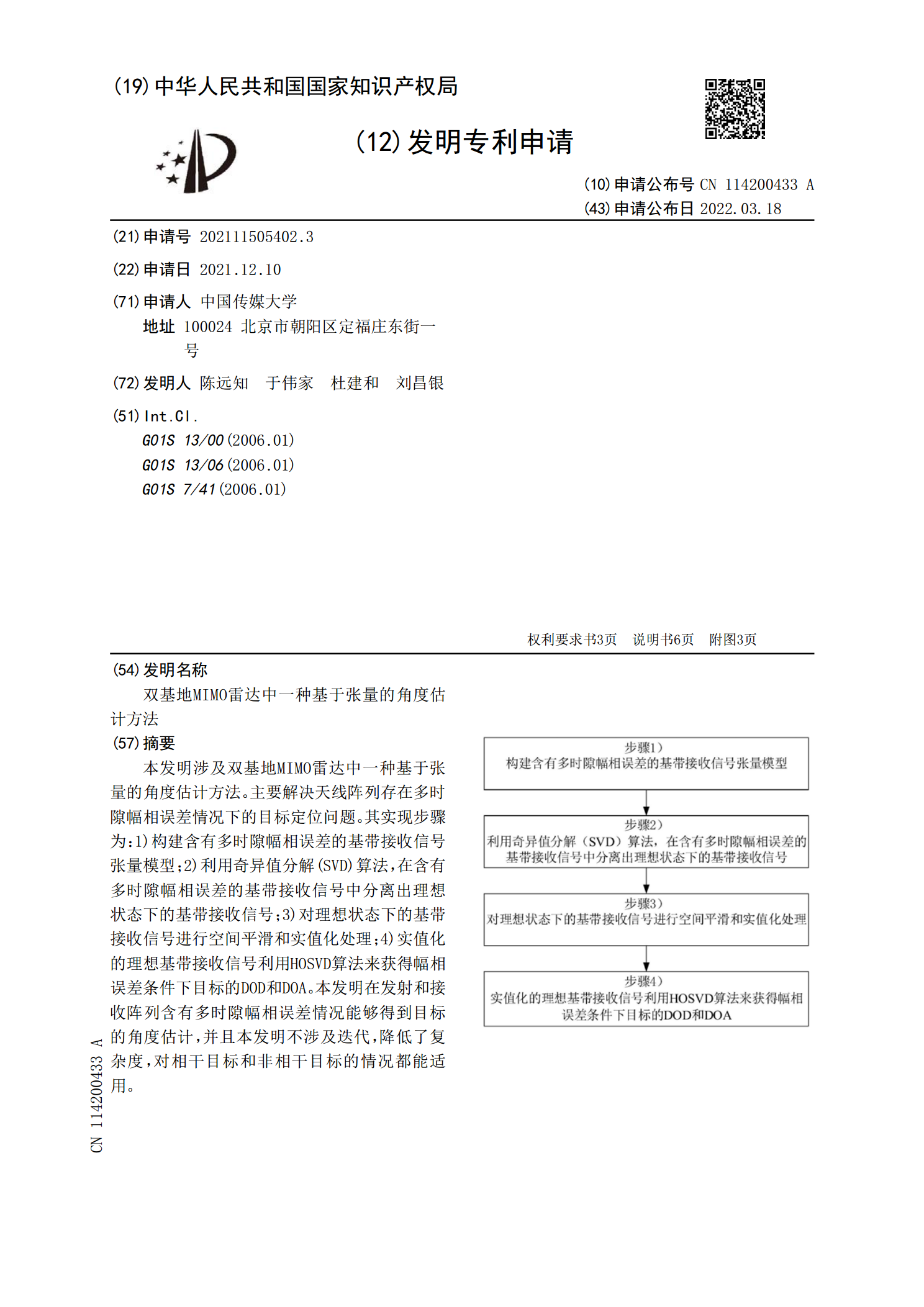
本发明涉及双基地MIMO雷达中一种基于张量的角度估计方法。主要解决天线阵列存在多时隙幅相误差情况下的目标定位问题。其实现步骤为:1)构建含有多时隙幅相误差的基带接收信号张量模型;2)利用奇异值分解(SVD)算法,在含有多时隙幅相误差的基带接收信号中分离出理想状态下的基带接收信号;3)对理想状态下的基带接收信号进行空间平滑和实值化处理;4)实值化的理想基带接收信号利用HOSVD算法来获得幅相误差条件下目标的DOD和DOA。本发明在发射和接收阵列含有多时隙幅相误差情况能够得到目标的角度估计,并且本发明不涉及迭

一种MIMO雷达参数估计方法.pdf
本发明公开了一种MIMO雷达参数估计方法,属于雷达工程领域。所述方法包括如下步骤:建立MIMO雷达信号模型,获取目标的信号数据矩阵;对所述信号数据矩阵进行数据重组、数据矩阵扩展,得到协方差矩阵;对所述协方差矩阵做特征值分解,获得信号子空间;通过所述信号子空间获得信号子空间阵列;联合信号子空间阵列矩阵对其分解得到来波方向的俯仰角、方位角和多普勒频率。本发明算法可以提高对目标的多普勒频率、方位角以及俯仰角的估计精度,同时在多个远场目标相距较近的情况下可以获得高精度的参数估计结果,并且该方法在参数估计过程中实现

基于改进RPCA的双基地MIMO雷达参数估计方法.docx
基于改进RPCA的双基地MIMO雷达参数估计方法基于改进RPCA的双基地MIMO雷达参数估计方法摘要:随着雷达技术的发展和应用的广泛,双基地MIMO雷达系统逐渐被引入并应用于多种领域。双基地MIMO雷达系统能够利用多个基地之间的多径协作,提供更为精确的目标参数估计。本文提出了一种基于改进矩阵分解技术的双基地MIMO雷达参数估计方法,通过对接收到的信号进行RPCA处理,提取出目标信号和干扰信号的相关信息,并利用这些信息进行参数估计。实验结果表明,该方法能够提高双基地MIMO雷达系统的参数估计性能,提高雷达的