
一种MIMO雷达参数估计方法.pdf

绮兰****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种MIMO雷达参数估计方法.pdf
本发明公开了一种MIMO雷达参数估计方法,属于雷达工程领域。所述方法包括如下步骤:建立MIMO雷达信号模型,获取目标的信号数据矩阵;对所述信号数据矩阵进行数据重组、数据矩阵扩展,得到协方差矩阵;对所述协方差矩阵做特征值分解,获得信号子空间;通过所述信号子空间获得信号子空间阵列;联合信号子空间阵列矩阵对其分解得到来波方向的俯仰角、方位角和多普勒频率。本发明算法可以提高对目标的多普勒频率、方位角以及俯仰角的估计精度,同时在多个远场目标相距较近的情况下可以获得高精度的参数估计结果,并且该方法在参数估计过程中实现

MIMO雷达参数估计与数据融合方法研究.docx
MIMO雷达参数估计与数据融合方法研究MIMO雷达(Multiple-InputMultiple-OutputRadar)是一种利用多个发射和接收天线实现增强性能的雷达系统。相比传统的单输入单输出(SISO)雷达系统,MIMO雷达具有更强的探测和定位能力。MIMO雷达的参数估计和数据融合方法是研究MIMO雷达性能优化的重要课题。MIMO雷达系统中的关键参数包括:信道矩阵、噪声协方差矩阵和目标散射矩阵等。信道矩阵描述雷达与目标之间的传输通道特性,噪声协方差矩阵描述接收信号的噪声特性,目标散射矩阵描述目标的散

MIMO雷达参数估计方法研究的任务书.docx
MIMO雷达参数估计方法研究的任务书一、研究背景近年来,随着雷达应用领域的不断拓展与技术水平的不断提升,多输入多输出(MIMO)雷达逐渐成为研究热点。相较于传统的单输入单输出(SISO)雷达,MIMO雷达具有更高的性能、更强的鲁棒性和更大的工作范围等优势,广泛应用于目标探测、跟踪、成像等领域。其中,MIMO雷达参数估计是MIMO雷达技术的关键环节,直接影响到MIMO雷达的性能和效果。因此,开展MIMO雷达参数估计方法的研究具有重要意义。二、研究内容1.综述MIMO雷达参数估计方法的现状对现有的MIMO雷达

MIMO雷达多目标参数估计.docx
MIMO雷达多目标参数估计题目:MIMO雷达多目标参数估计摘要:MIMO雷达已经成为了当前雷达技术研究的核心方向之一,它具有精准定位、高分辨率、高功率利用率、多径抑制等优点。在雷达中,多目标参数估计是一个重要的问题,因为它可以帮助识别和跟踪多个目标。本文对MIMO雷达多目标参数估计的方法进行了综述。首先,介绍了MIMO雷达的基本原理和多目标雷达的分类。然后,分析了三种主要的多目标参数估计方法,即批处理方法、粒子群优化方法和卡尔曼滤波方法。最后,讨论了MIMO雷达多目标参数估计的应用前景和未来研究方向。关键
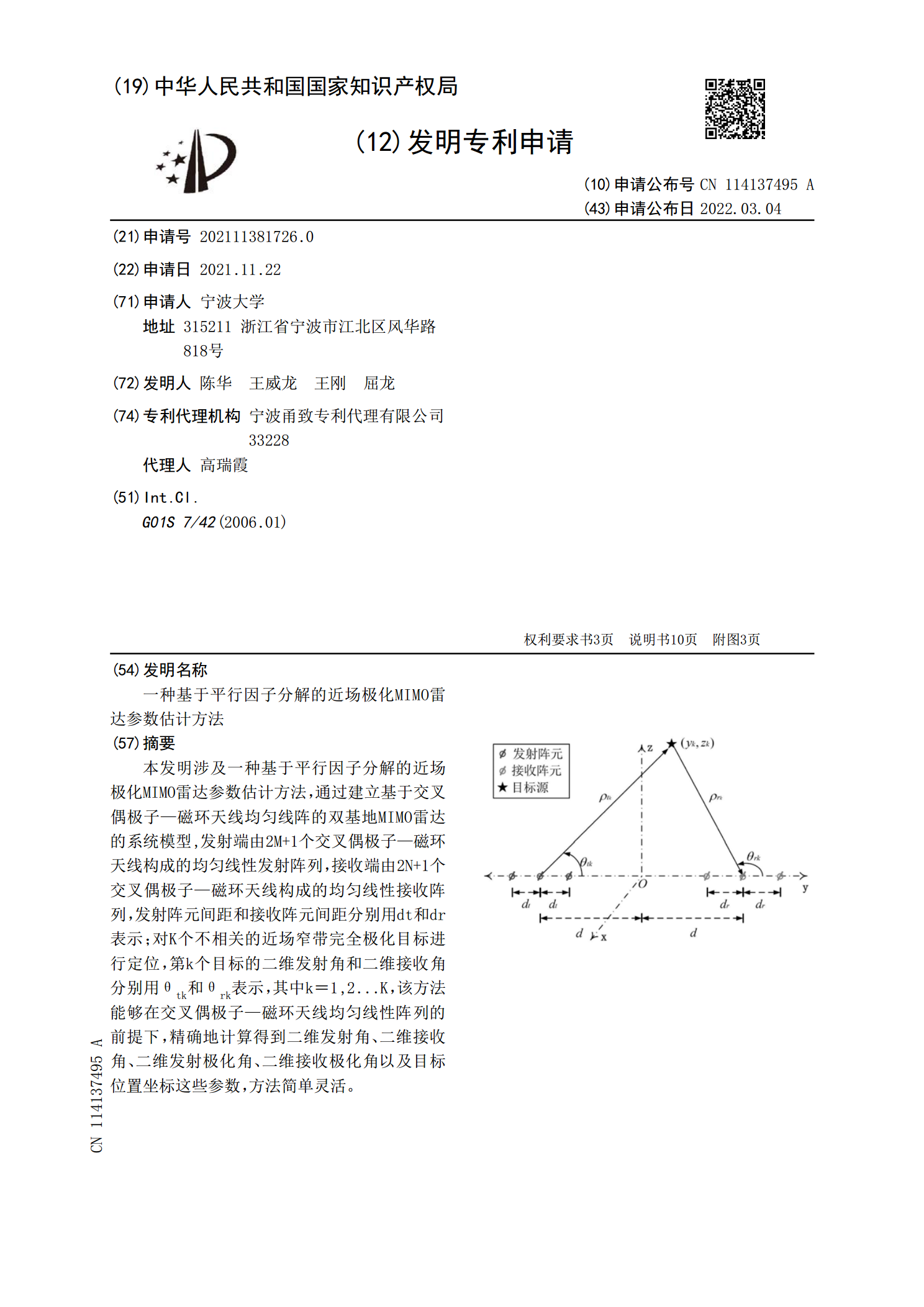
一种基于平行因子分解的近场极化MIMO雷达参数估计方法.pdf
本发明涉及一种基于平行因子分解的近场极化MIMO雷达参数估计方法,通过建立基于交叉偶极子—磁环天线均匀线阵的双基地MIMO雷达的系统模型,发射端由2M+1个交叉偶极子—磁环天线构成的均匀线性发射阵列,接收端由2N+1个交叉偶极子—磁环天线构成的均匀线性接收阵列,发射阵元间距和接收阵元间距分别用dt和dr表示;对K个不相关的近场窄带完全极化目标进行定位,第k个目标的二维发射角和二维接收角分别用θ