
一种基于特征的雷达运动目标检测和干扰抑制方法及系统.pdf

英瑞****写意

1/10
2/10
3/10
4/10
5/10
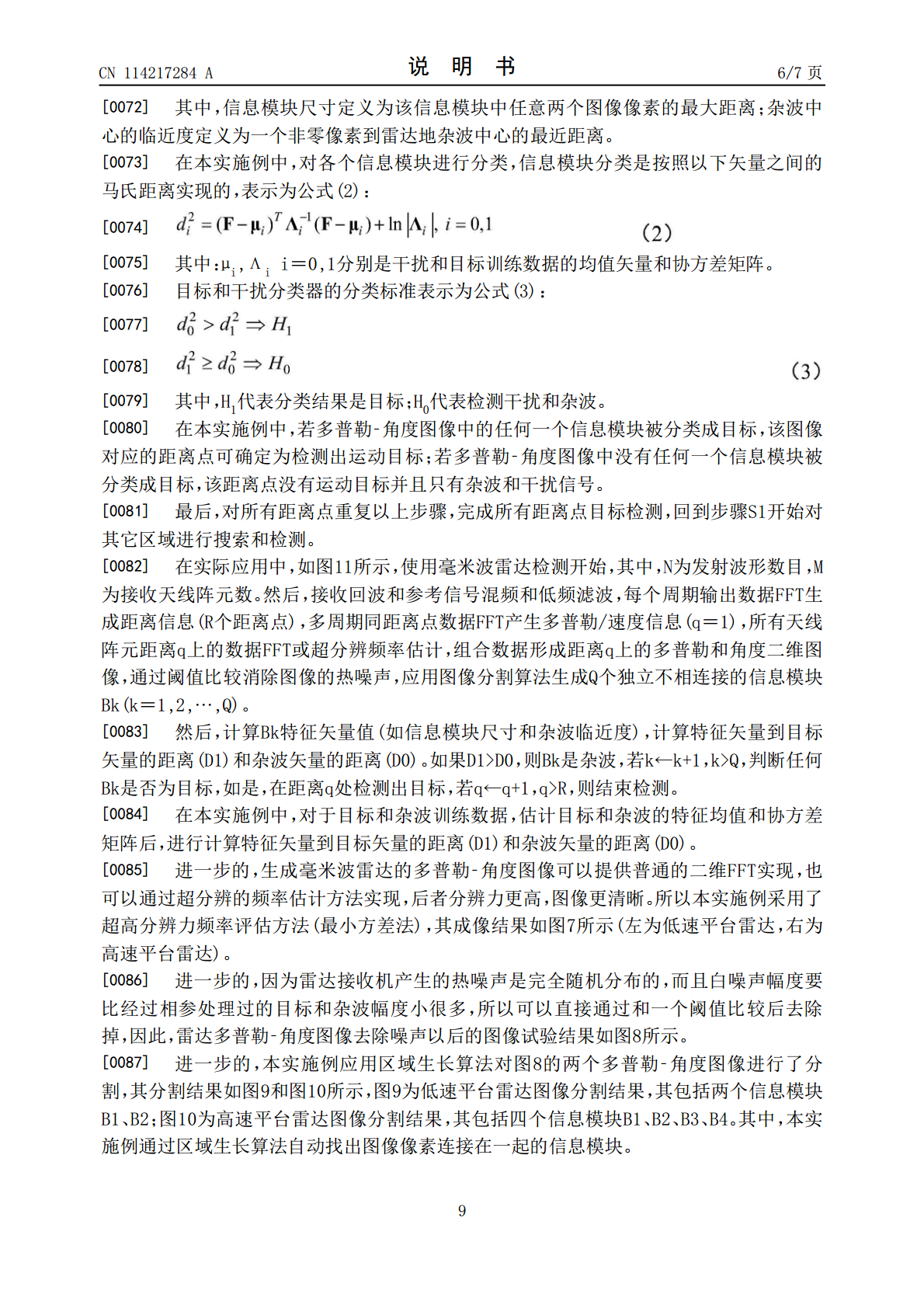
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于特征的雷达运动目标检测和干扰抑制方法及系统.pdf
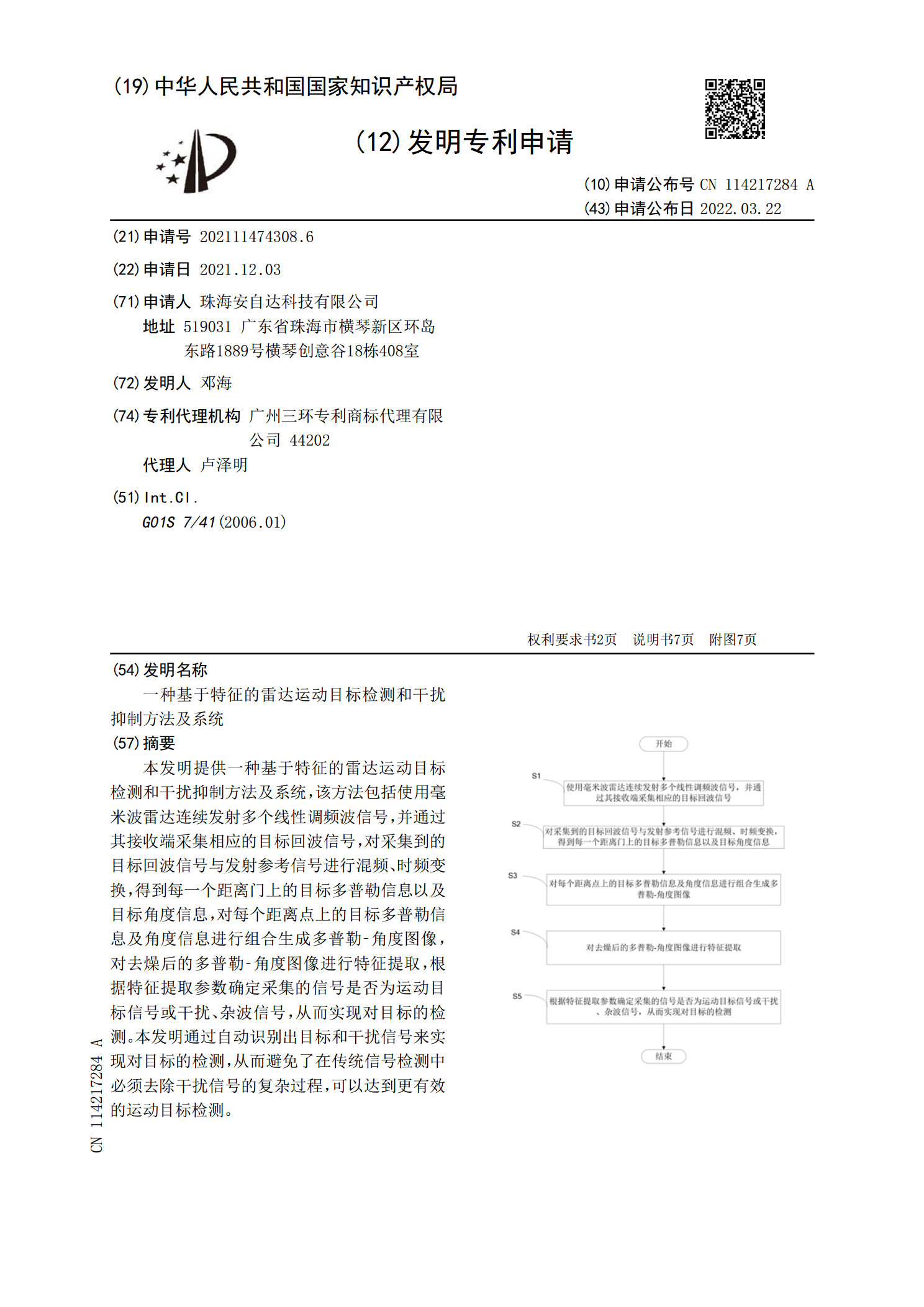
本发明提供一种基于特征的雷达运动目标检测和干扰抑制方法及系统,该方法包括使用毫米波雷达连续发射多个线性调频波信号,并通过其接收端采集相应的目标回波信号,对采集到的目标回波信号与发射参考信号进行混频、时频变换,得到每一个距离门上的目标多普勒信息以及目标角度信息,对每个距离点上的目标多普勒信息及角度信息进行组合生成多普勒‑角度图像,对去燥后的多普勒‑角度图像进行特征提取,根据特征提取参数确定采集的信号是否为运动目标信号或干扰、杂波信号,从而实现对目标的检测。本发明通过自动识别出目标和干扰信号来实现对目标的检测
一种FMCW雷达干扰检测和抑制方法及系统.pdf
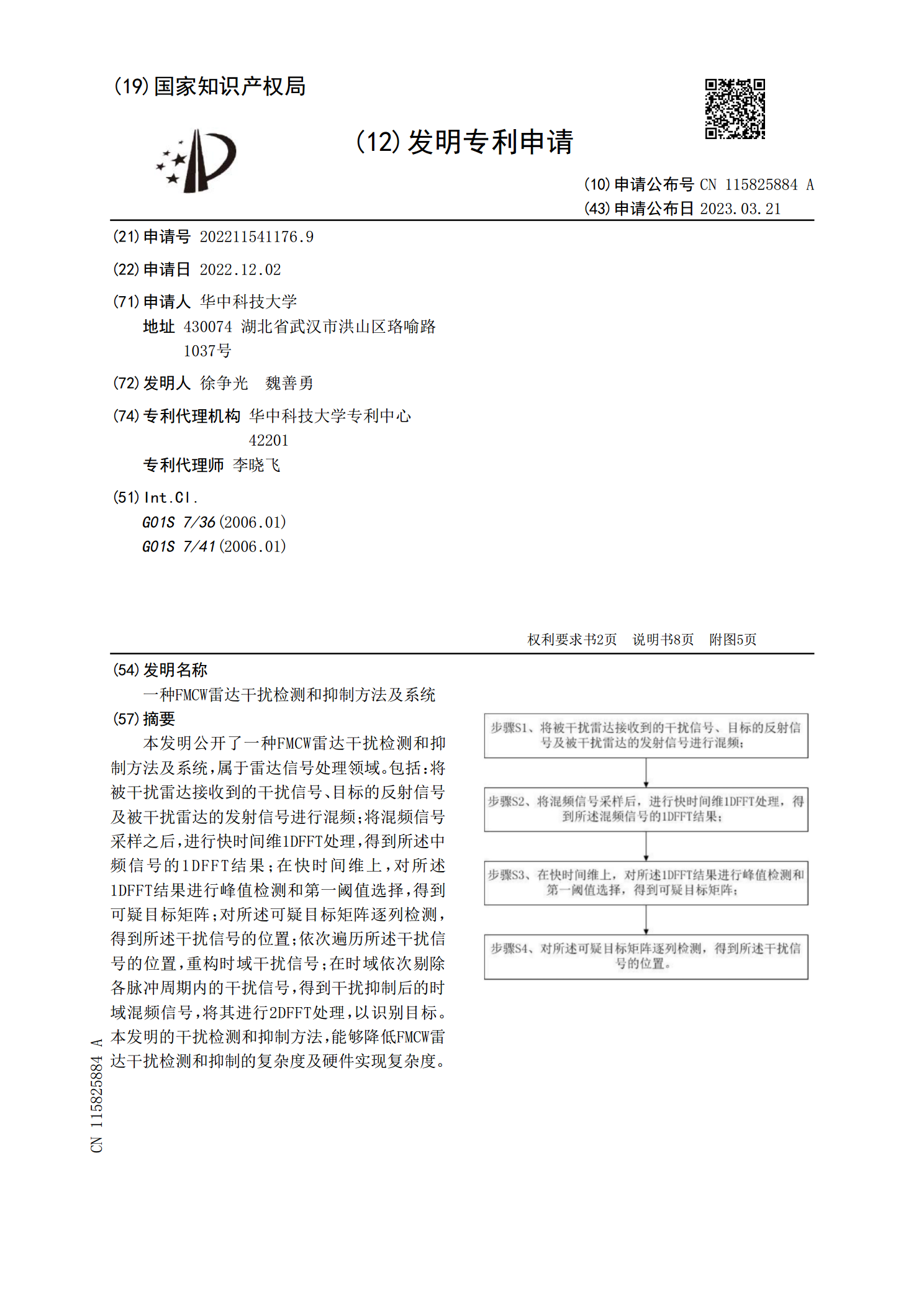
本发明公开了一种FMCW雷达干扰检测和抑制方法及系统,属于雷达信号处理领域。包括:将被干扰雷达接收到的干扰信号、目标的反射信号及被干扰雷达的发射信号进行混频;将混频信号采样之后,进行快时间维1DFFT处理,得到所述中频信号的1DFFT结果;在快时间维上,对所述1DFFT结果进行峰值检测和第一阈值选择,得到可疑目标矩阵;对所述可疑目标矩阵逐列检测,得到所述干扰信号的位置;依次遍历所述干扰信号的位置,重构时域干扰信号;在时域依次剔除各脉冲周期内的干扰信号,得到干扰抑制后的时域混频信号,将其进行2DFFT处理,
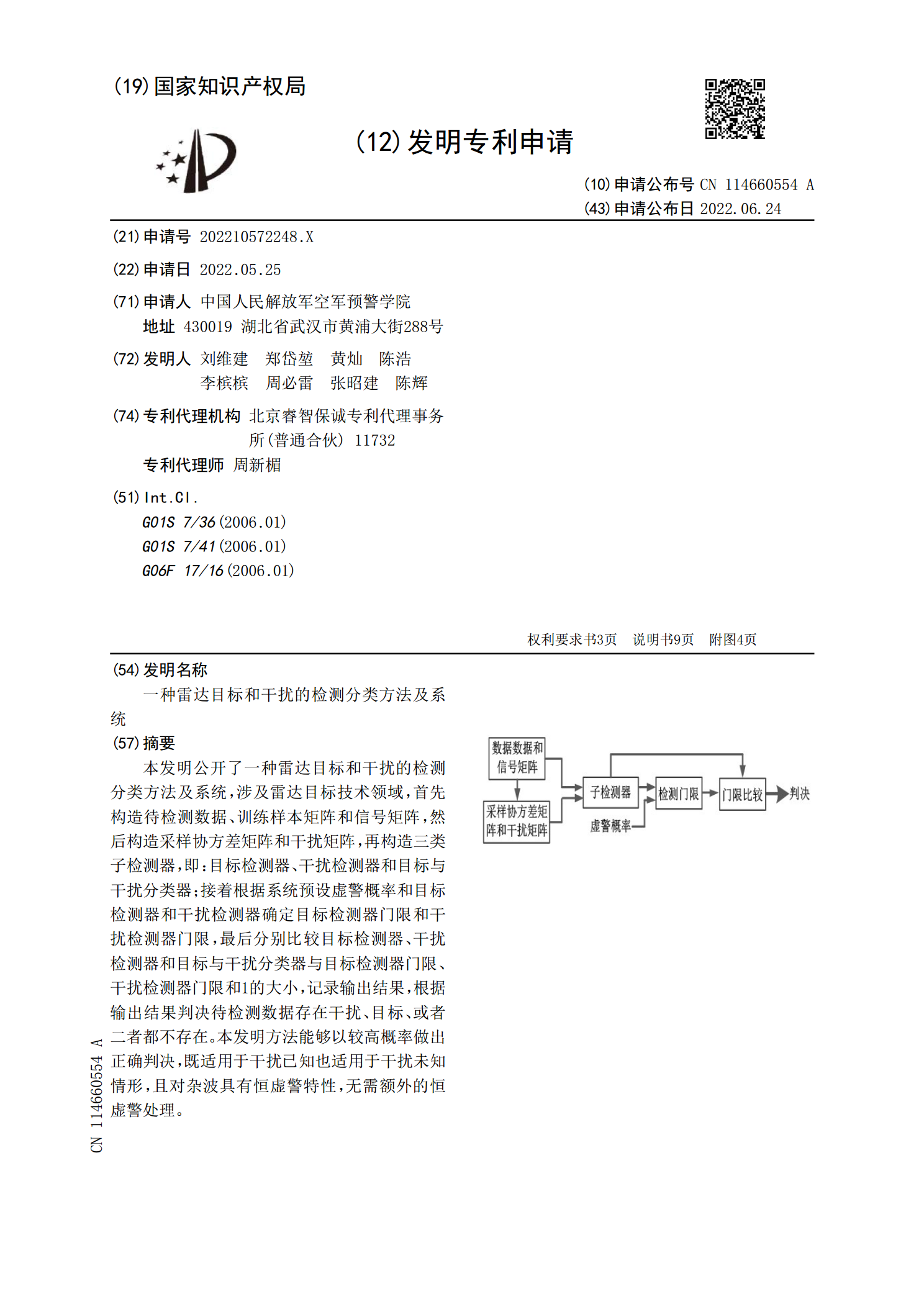
一种雷达目标和干扰的检测分类方法及系统.pdf
本发明公开了一种雷达目标和干扰的检测分类方法及系统,涉及雷达目标技术领域,首先构造待检测数据、训练样本矩阵和信号矩阵,然后构造采样协方差矩阵和干扰矩阵,再构造三类子检测器,即:目标检测器、干扰检测器和目标与干扰分类器;接着根据系统预设虚警概率和目标检测器和干扰检测器确定目标检测器门限和干扰检测器门限,最后分别比较目标检测器、干扰检测器和目标与干扰分类器与目标检测器门限、干扰检测器门限和1的大小,记录输出结果,根据输出结果判决待检测数据存在干扰、目标、或者二者都不存在。本发明方法能够以较高概率做出正确判决,

基于INet的雷达图像杂波抑制和目标检测方法.docx
基于INet的雷达图像杂波抑制和目标检测方法摘要:随着科技的不断发展,INet雷达系统成为了目前广泛使用的一种雷达系统。在雷达图像处理领域中,杂波抑制和目标检测是非常重要的研究方向。本文针对INet雷达图像的特点,提出了一种基于小波变换和深度学习的杂波抑制和目标检测方法。该方法不仅能够有效地抑制INet雷达图像中的杂波,还能够对雷达图像进行目标检测,具有较高的准确率。一、研究背景雷达系统是一种利用电磁波的反射信号来检测和跟踪目标的重要工具。随着雷达技术的不断发展,INet雷达系统成为了目前广泛使用的一种雷
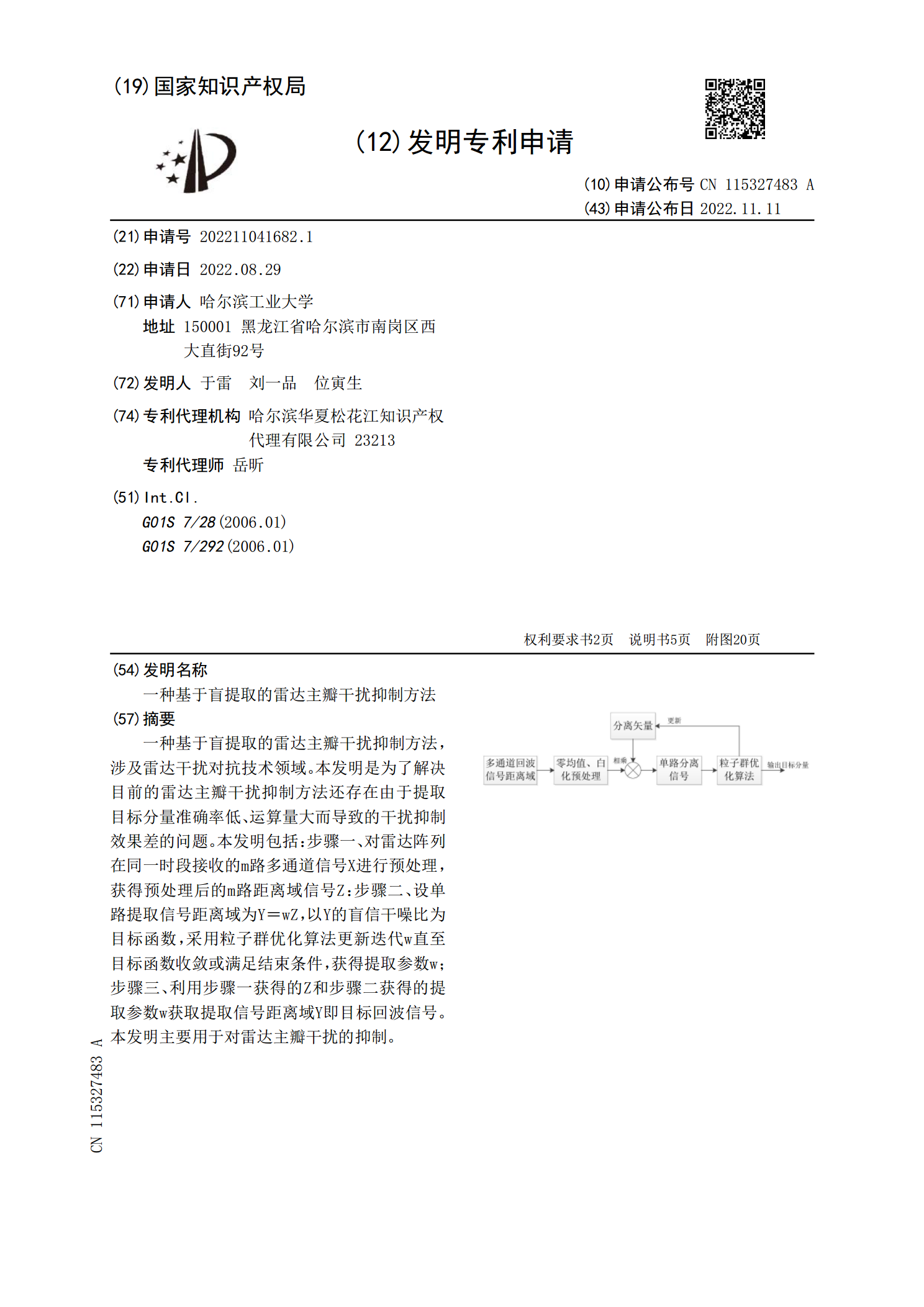
一种基于盲提取的雷达主瓣干扰抑制方法.pdf
一种基于盲提取的雷达主瓣干扰抑制方法,涉及雷达干扰对抗技术领域。本发明是为了解决目前的雷达主瓣干扰抑制方法还存在由于提取目标分量准确率低、运算量大而导致的干扰抑制效果差的问题。本发明包括:步骤一、对雷达阵列在同一时段接收的m路多通道信号X进行预处理,获得预处理后的m路距离域信号Z:步骤二、设单路提取信号距离域为Y=wZ,以Y的盲信干噪比为目标函数,采用粒子群优化算法更新迭代w直至目标函数收敛或满足结束条件,获得提取参数w;步骤三、利用步骤一获得的Z和步骤二获得的提取参数w获取提取信号距离域Y即目标回波信号