
一种基于车辆特征匹配的无人机视频车辆检索方法.pdf

又珊****ck


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于车辆特征匹配的无人机视频车辆检索方法.pdf
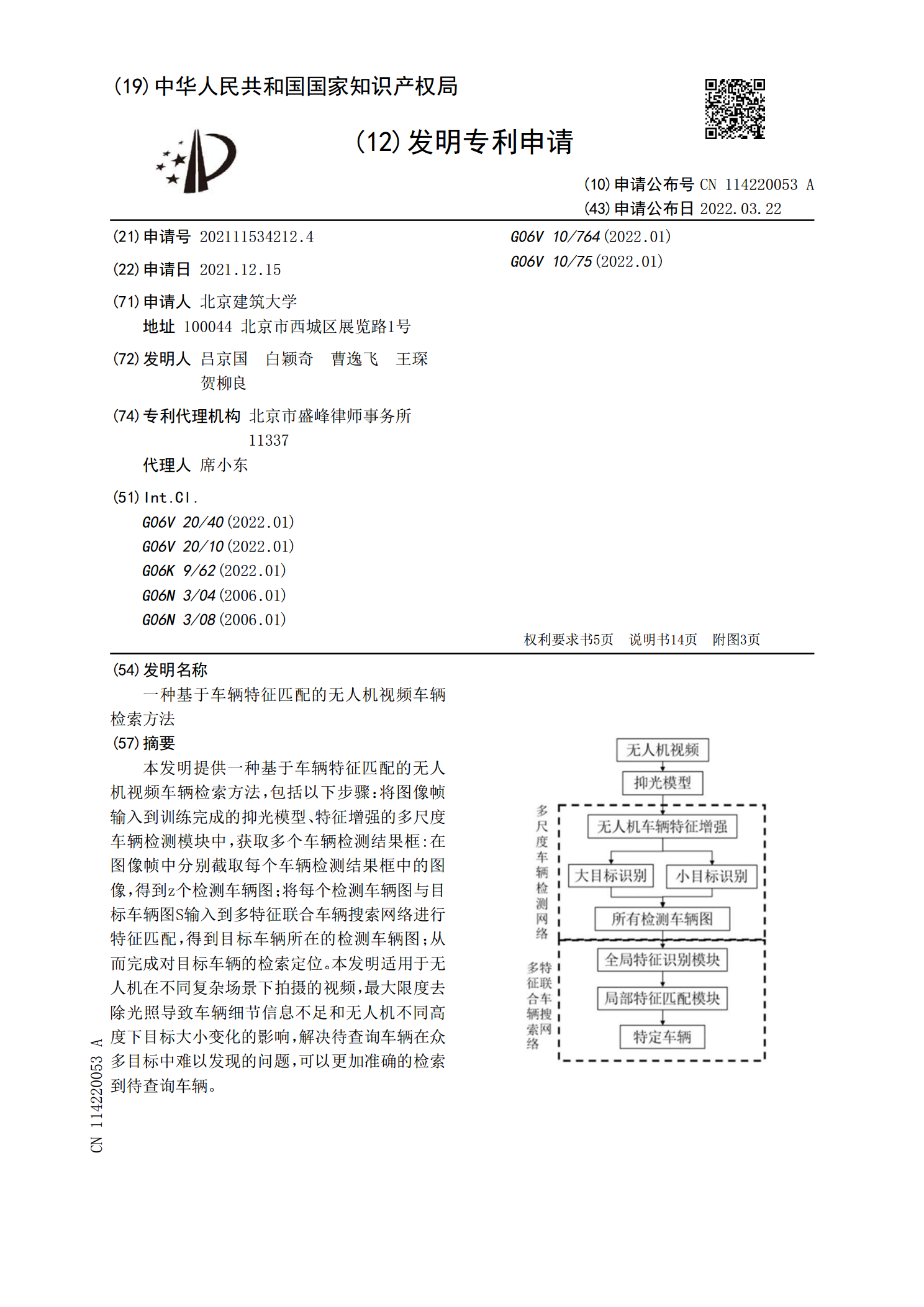
本发明提供一种基于车辆特征匹配的无人机视频车辆检索方法,包括以下步骤:将图像帧输入到训练完成的抑光模型、特征增强的多尺度车辆检测模块中,获取多个车辆检测结果框:在图像帧中分别截取每个车辆检测结果框中的图像,得到z个检测车辆图;将每个检测车辆图与目标车辆图S输入到多特征联合车辆搜索网络进行特征匹配,得到目标车辆所在的检测车辆图;从而完成对目标车辆的检索定位。本发明适用于无人机在不同复杂场景下拍摄的视频,最大限度去除光照导致车辆细节信息不足和无人机不同高度下目标大小变化的影响,解决待查询车辆在众多目标中难以发
一种基于视频的车辆特征提取与匹配方法.pdf
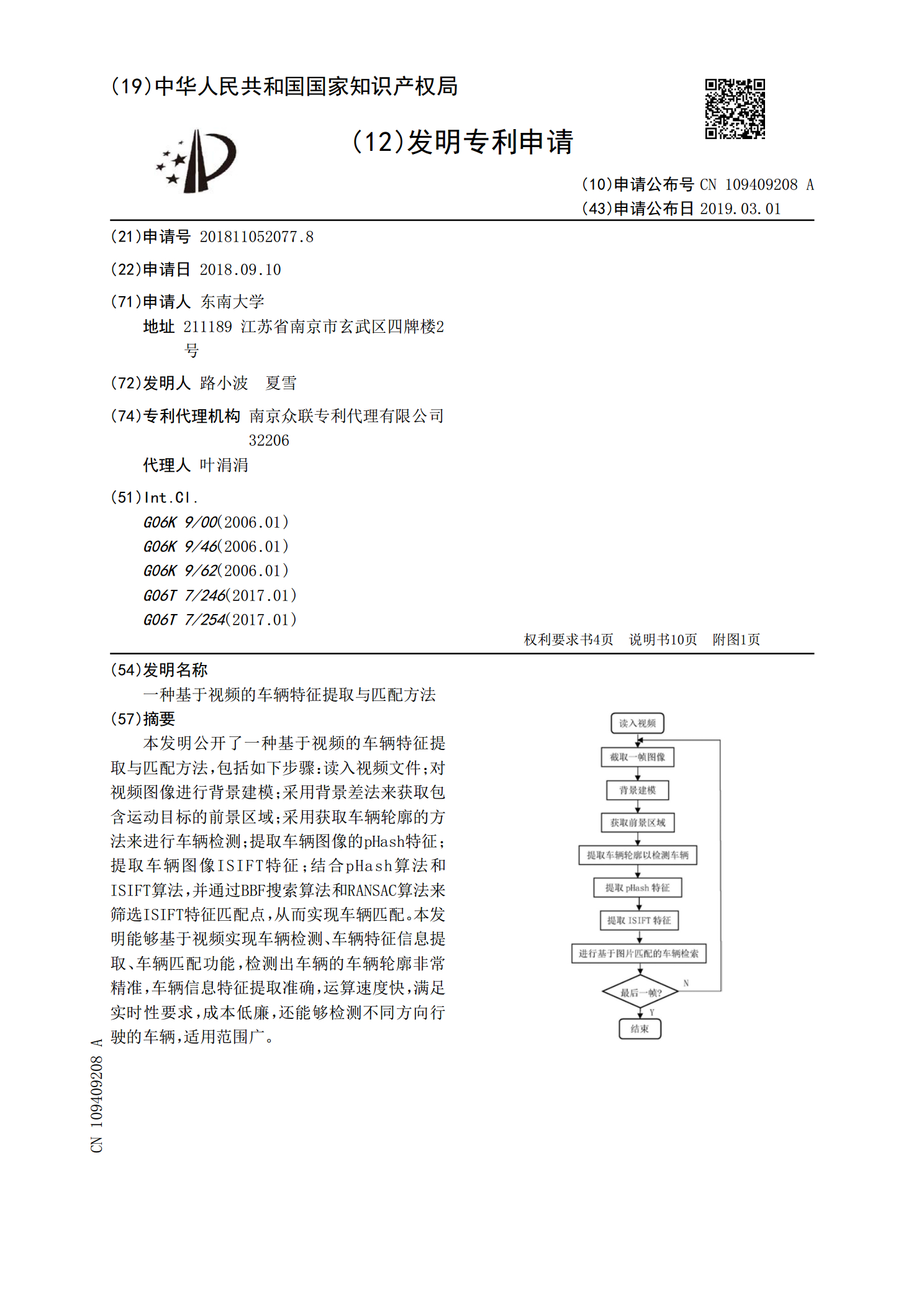
本发明公开了一种基于视频的车辆特征提取与匹配方法,包括如下步骤:读入视频文件;对视频图像进行背景建模;采用背景差法来获取包含运动目标的前景区域;采用获取车辆轮廓的方法来进行车辆检测;提取车辆图像的pHash特征;提取车辆图像ISIFT特征;结合pHash算法和ISIFT算法,并通过BBF搜索算法和RANSAC算法来筛选ISIFT特征匹配点,从而实现车辆匹配。本发明能够基于视频实现车辆检测、车辆特征信息提取、车辆匹配功能,检测出车辆的车辆轮廓非常精准,车辆信息特征提取准确,运算速度快,满足实时性要求,成本低

基于车辆特征的交通视频检索的任务书.docx
基于车辆特征的交通视频检索的任务书一、背景交通监控系统已经成为城市交通管理的重要手段,同时也是城市安全保障的重要组成部分。交通监控系统利用摄像头等设备记录并监控道路交通情况,能够有效的避免交通事故的发生,优化城市交通流量,提高城市交通管理效率。但是,随着城市交通规模的不断扩大和车辆保有量的不断增加,交通监控系统中海量的视频数据也面临着越来越大的存储和检索压力。交通视频检索是一种基于视频内容的检索方式,通过分析交通视频中的图像和信号特征,实现对视频资源的快速检索和查找。此外,交通视频检索还能够对车辆的行驶轨
一种基于车牌识别与车辆特征匹配的套牌检测方法.pdf
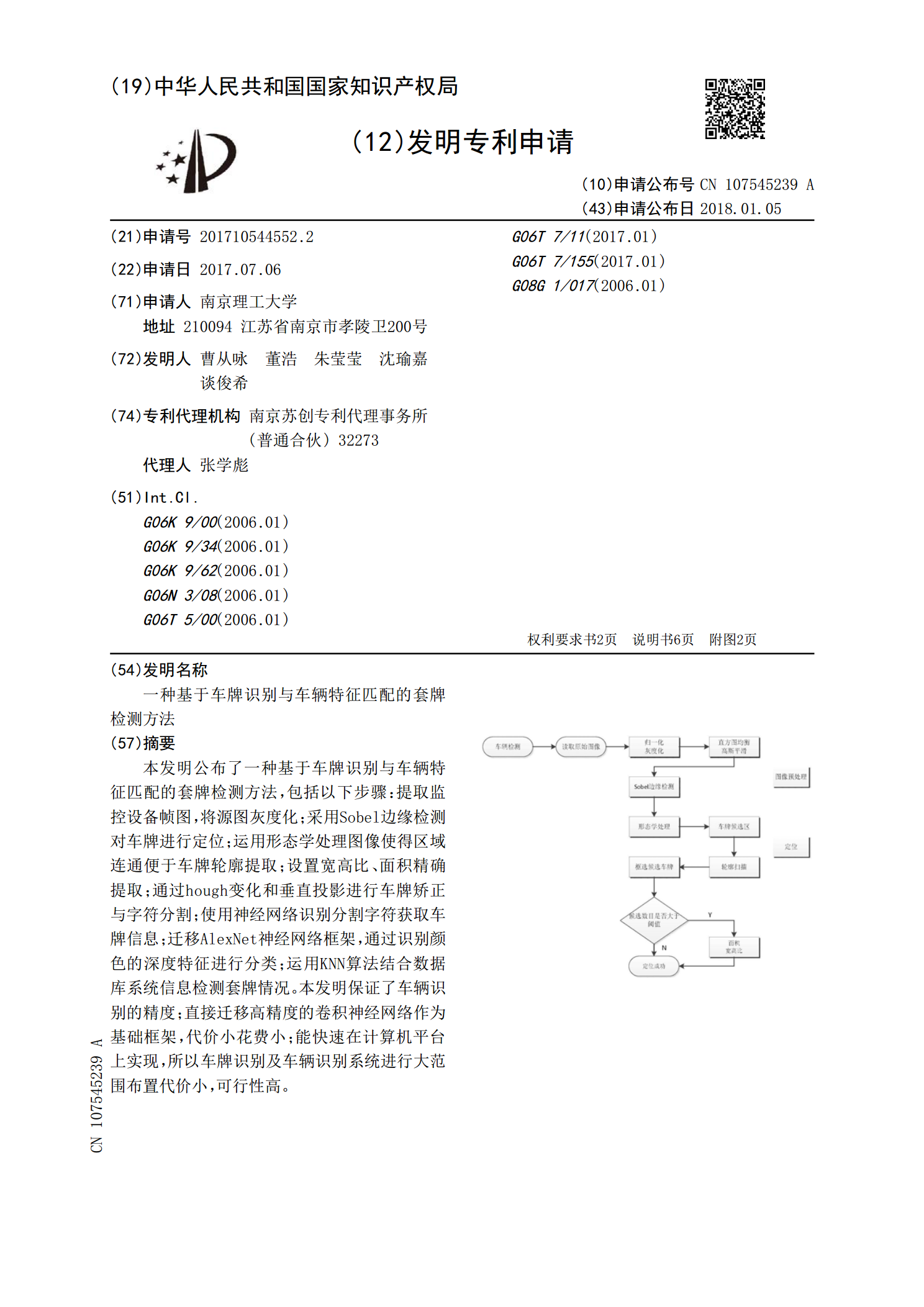
本发明公布了一种基于车牌识别与车辆特征匹配的套牌检测方法,包括以下步骤:提取监控设备帧图,将源图灰度化;采用Sobel边缘检测对车牌进行定位;运用形态学处理图像使得区域连通便于车牌轮廓提取;设置宽高比、面积精确提取;通过hough变化和垂直投影进行车牌矫正与字符分割;使用神经网络识别分割字符获取车牌信息;迁移AlexNet神经网络框架,通过识别颜色的深度特征进行分类;运用KNN算法结合数据库系统信息检测套牌情况。本发明保证了车辆识别的精度;直接迁移高精度的卷积神经网络作为基础框架,代价小花费小;能快速在计
一种基于草图局部特征和全局特征匹配的图像检索方法.pdf
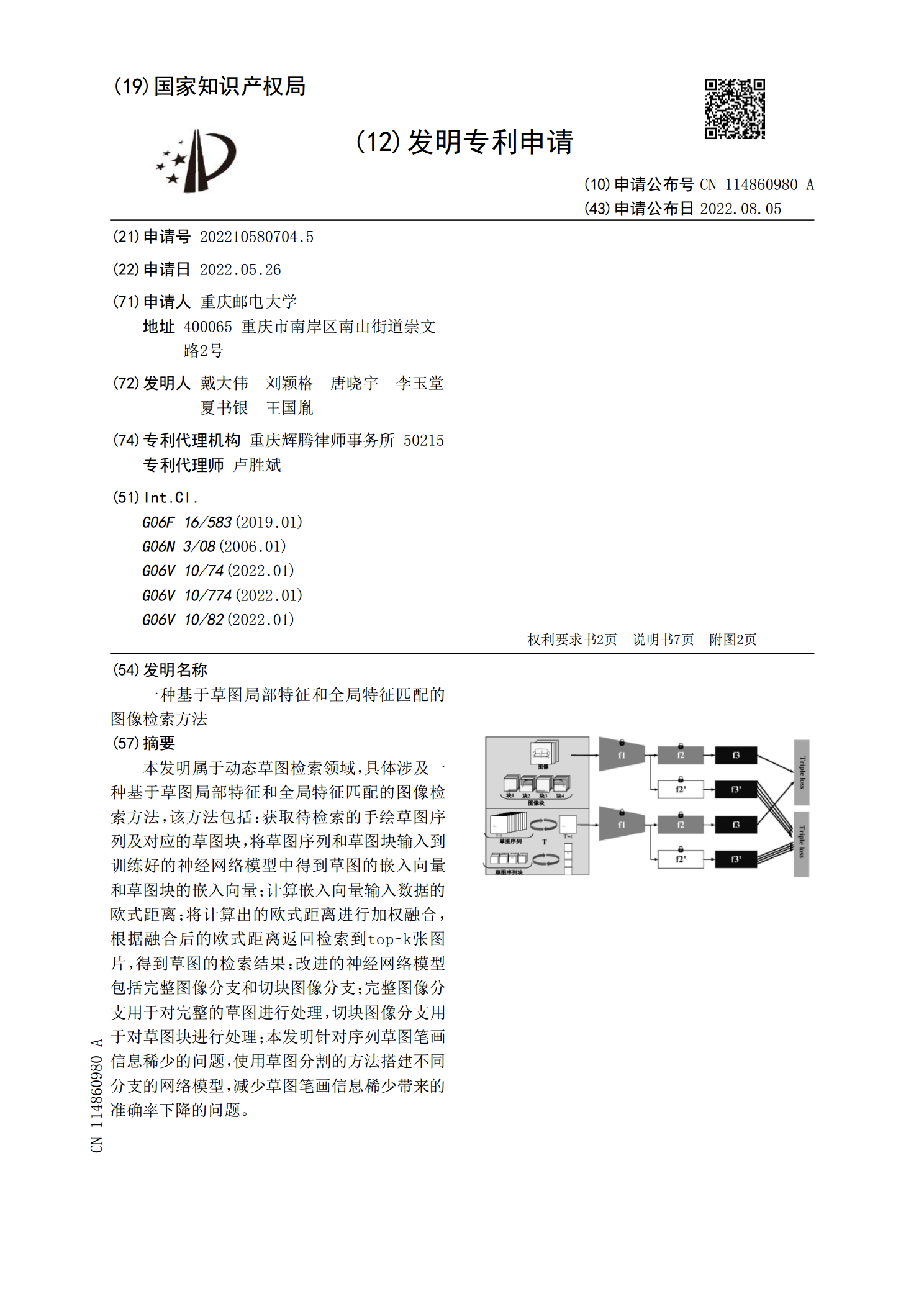
本发明属于动态草图检索领域,具体涉及一种基于草图局部特征和全局特征匹配的图像检索方法,该方法包括:获取待检索的手绘草图序列及对应的草图块,将草图序列和草图块输入到训练好的神经网络模型中得到草图的嵌入向量和草图块的嵌入向量;计算嵌入向量输入数据的欧式距离;将计算出的欧式距离进行加权融合,根据融合后的欧式距离返回检索到top‑k张图片,得到草图的检索结果;改进的神经网络模型包括完整图像分支和切块图像分支;完整图像分支用于对完整的草图进行处理,切块图像分支用于对草图块进行处理;本发明针对序列草图笔画信息稀少的问