
一种用于电网巡检的无人机辅助边缘计算方法.pdf

萌运****魔王

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于电网巡检的无人机辅助边缘计算方法.pdf
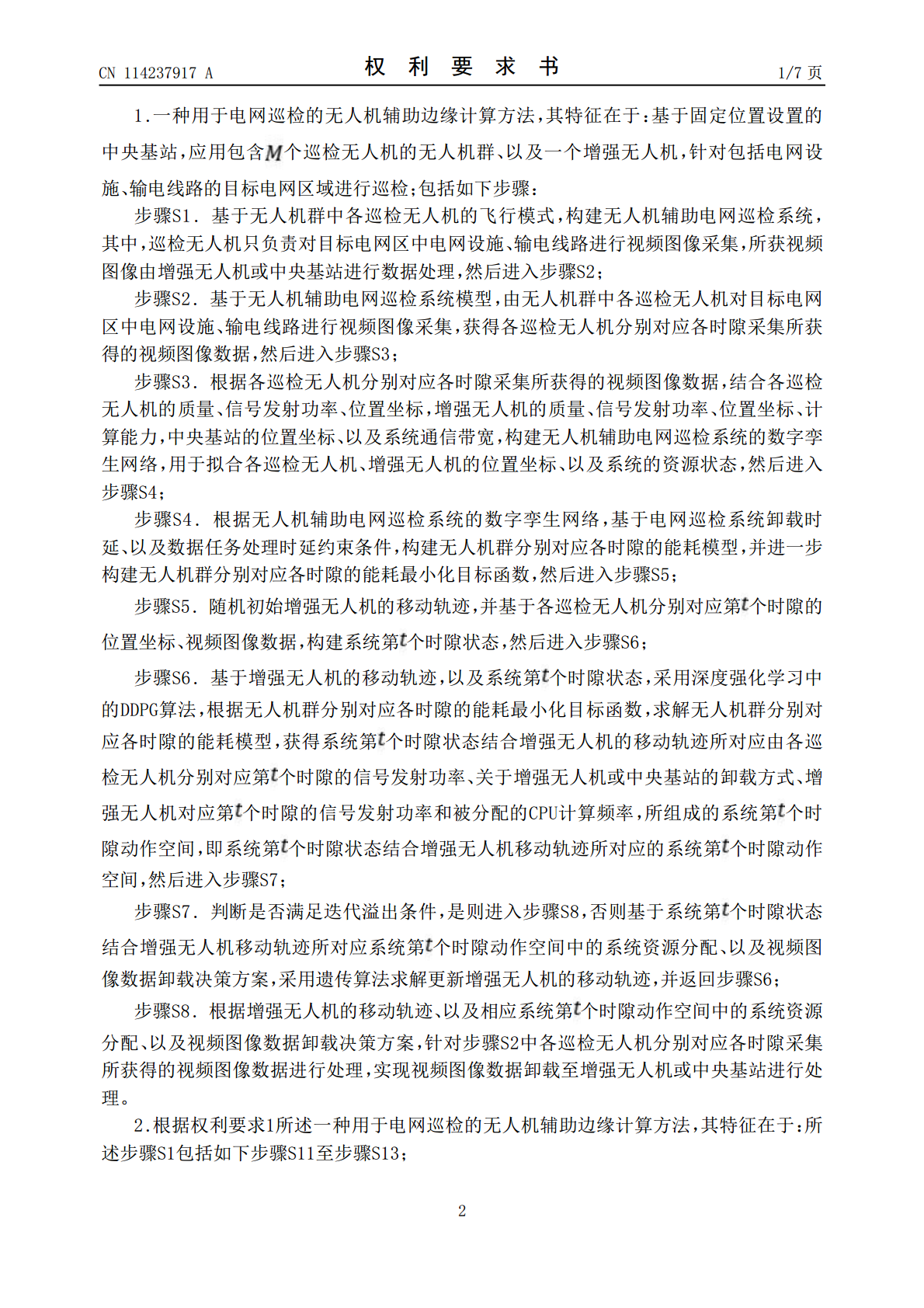
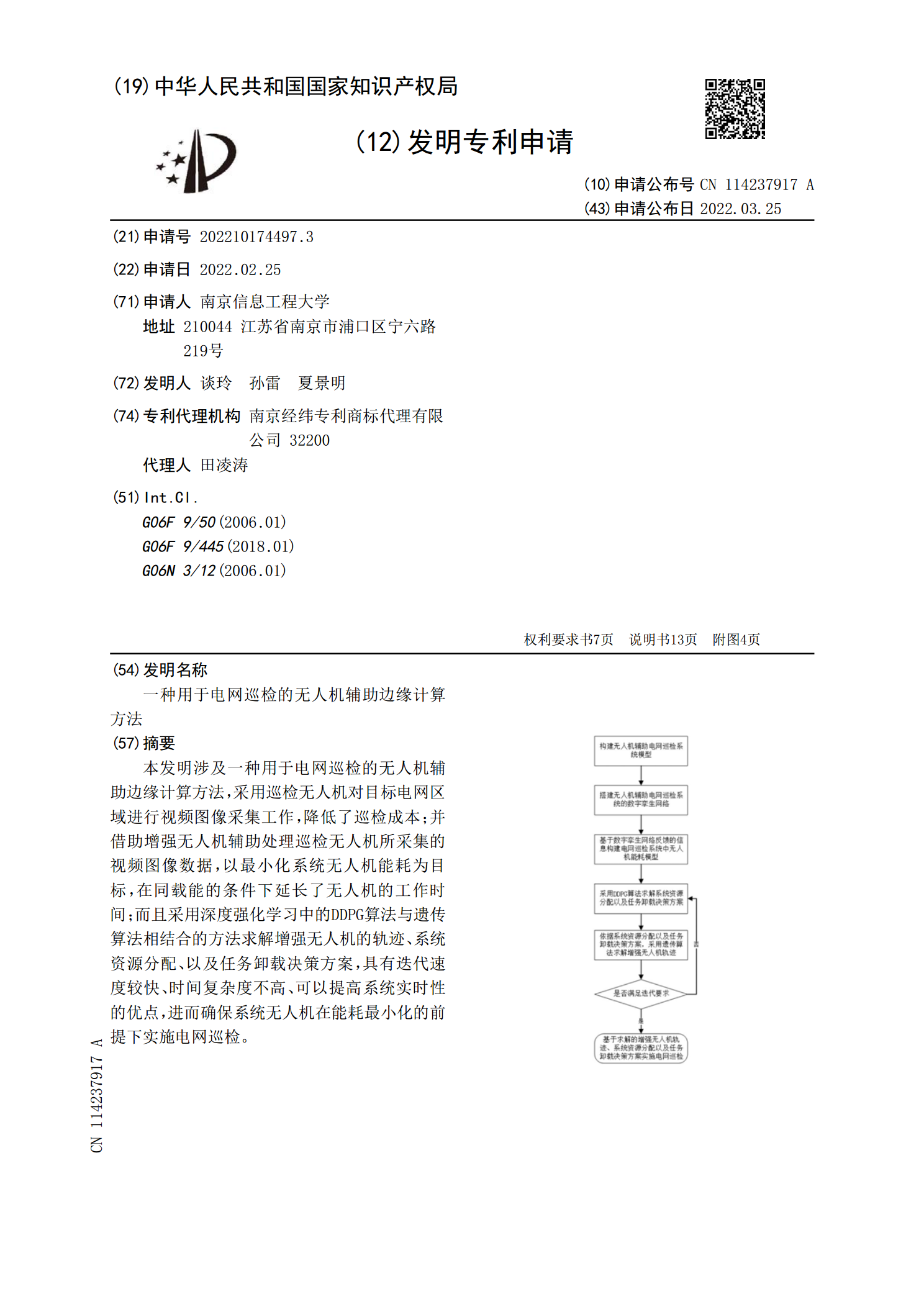
本发明涉及一种用于电网巡检的无人机辅助边缘计算方法,采用巡检无人机对目标电网区域进行视频图像采集工作,降低了巡检成本;并借助增强无人机辅助处理巡检无人机所采集的视频图像数据,以最小化系统无人机能耗为目标,在同载能的条件下延长了无人机的工作时间;而且采用深度强化学习中的DDPG算法与遗传算法相结合的方法求解增强无人机的轨迹、系统资源分配、以及任务卸载决策方案,具有迭代速度较快、时间复杂度不高、可以提高系统实时性的优点,进而确保系统无人机在能耗最小化的前提下实施电网巡检。
一种用于无人机辅助边缘计算的混合优化方法及系统.pdf
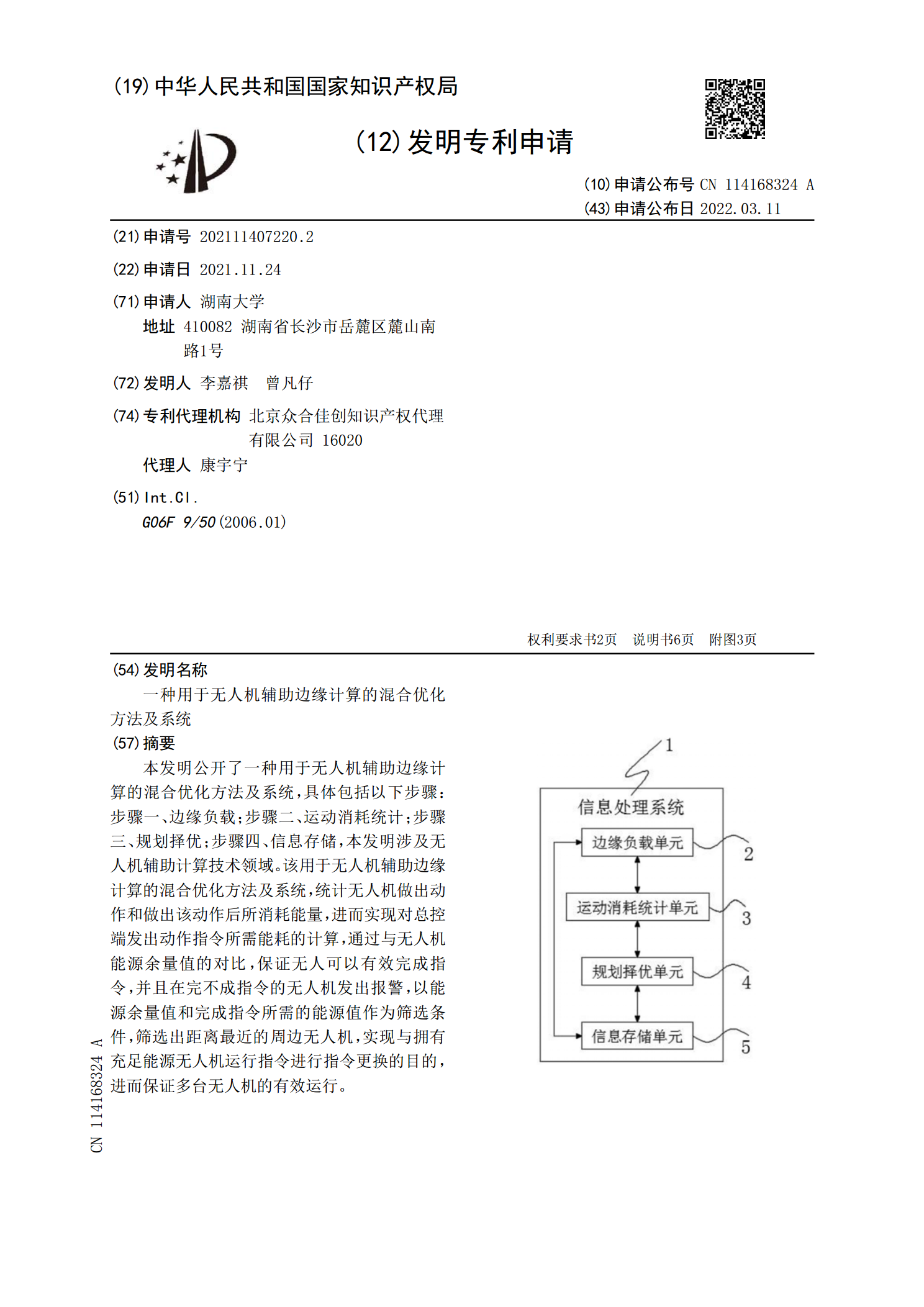
本发明公开了一种用于无人机辅助边缘计算的混合优化方法及系统,具体包括以下步骤:步骤一、边缘负载;步骤二、运动消耗统计;步骤三、规划择优;步骤四、信息存储,本发明涉及无人机辅助计算技术领域。该用于无人机辅助边缘计算的混合优化方法及系统,统计无人机做出动作和做出该动作后所消耗能量,进而实现对总控端发出动作指令所需能耗的计算,通过与无人机能源余量值的对比,保证无人可以有效完成指令,并且在完不成指令的无人机发出报警,以能源余量值和完成指令所需的能源值作为筛选条件,筛选出距离最近的周边无人机,实现与拥有充足能源无人
一种用于无人机辅助边缘计算的混合优化方法及系统.pdf
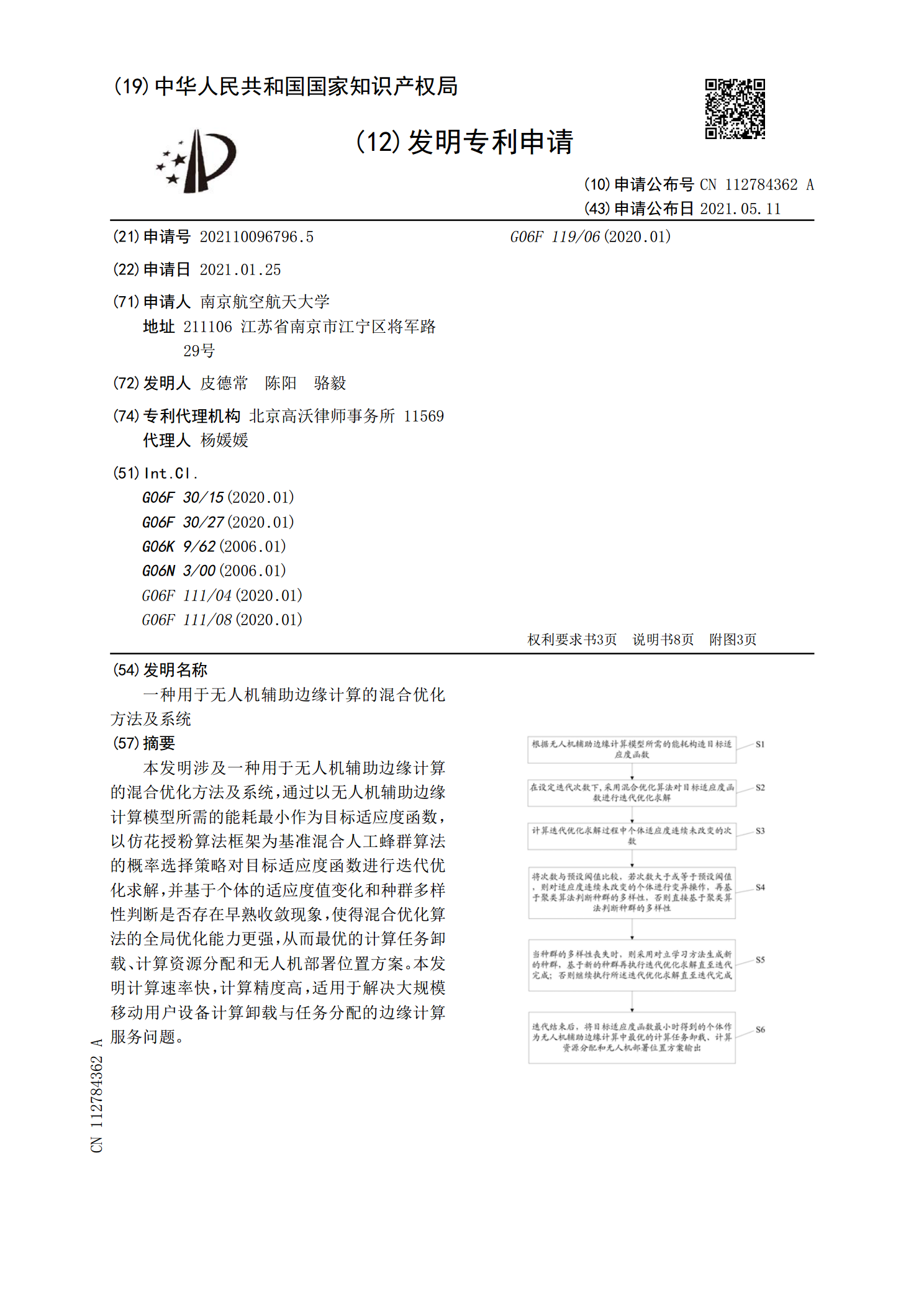
本发明涉及一种用于无人机辅助边缘计算的混合优化方法及系统,通过以无人机辅助边缘计算模型所需的能耗最小作为目标适应度函数,以仿花授粉算法框架为基准混合人工蜂群算法的概率选择策略对目标适应度函数进行迭代优化求解,并基于个体的适应度值变化和种群多样性判断是否存在早熟收敛现象,使得混合优化算法的全局优化能力更强,从而最优的计算任务卸载、计算资源分配和无人机部署位置方案。本发明计算速率快,计算精度高,适用于解决大规模移动用户设备计算卸载与任务分配的边缘计算服务问题。
一种用于桥梁的无人机巡检系统.pdf
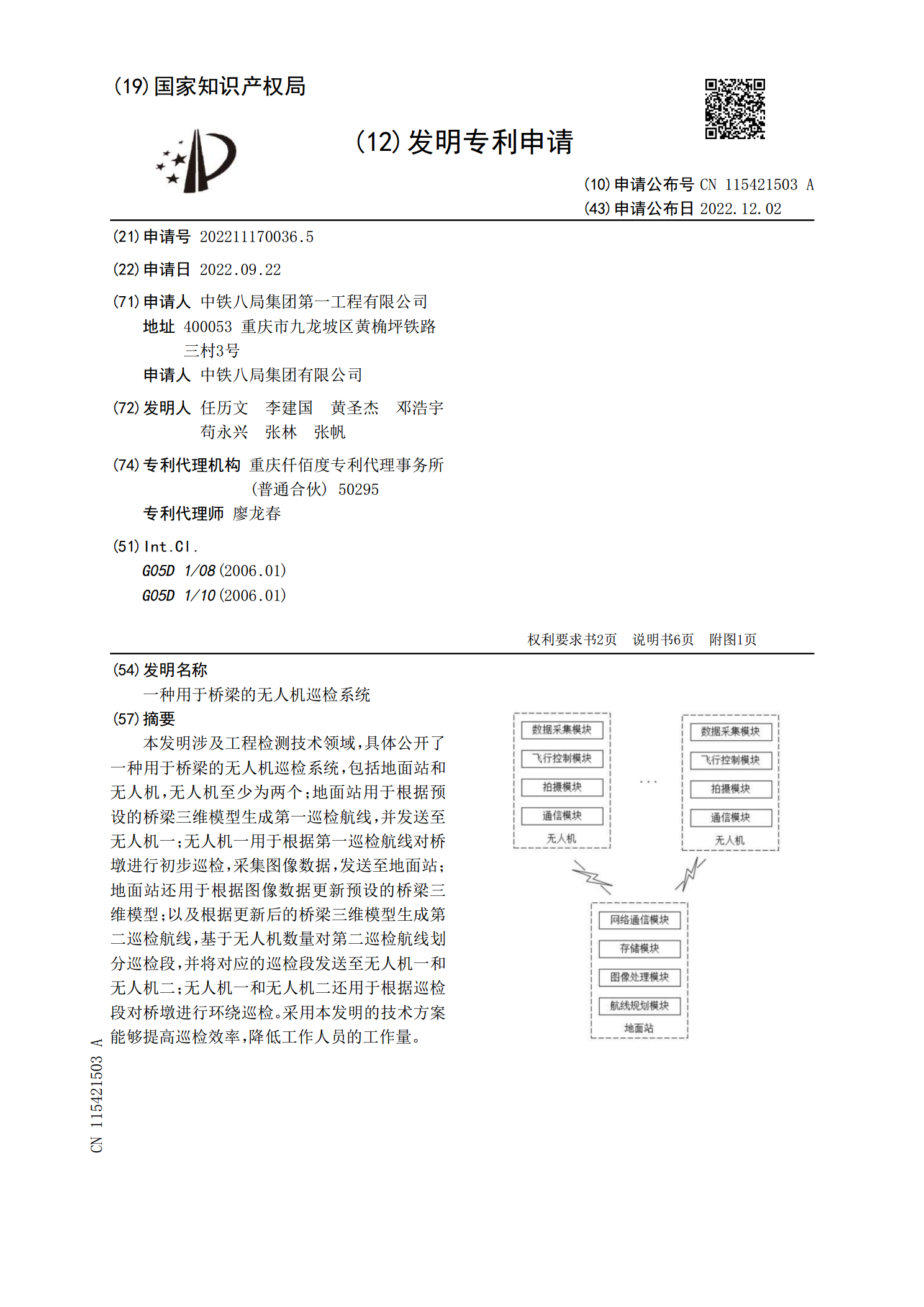
本发明涉及工程检测技术领域,具体公开了一种用于桥梁的无人机巡检系统,包括地面站和无人机,无人机至少为两个;地面站用于根据预设的桥梁三维模型生成第一巡检航线,并发送至无人机一;无人机一用于根据第一巡检航线对桥墩进行初步巡检,采集图像数据,发送至地面站;地面站还用于根据图像数据更新预设的桥梁三维模型;以及根据更新后的桥梁三维模型生成第二巡检航线,基于无人机数量对第二巡检航线划分巡检段,并将对应的巡检段发送至无人机一和无人机二;无人机一和无人机二还用于根据巡检段对桥墩进行环绕巡检。采用本发明的技术方案能够提高巡
一种用于配电网监测及预判的边缘计算方法及装置.pdf
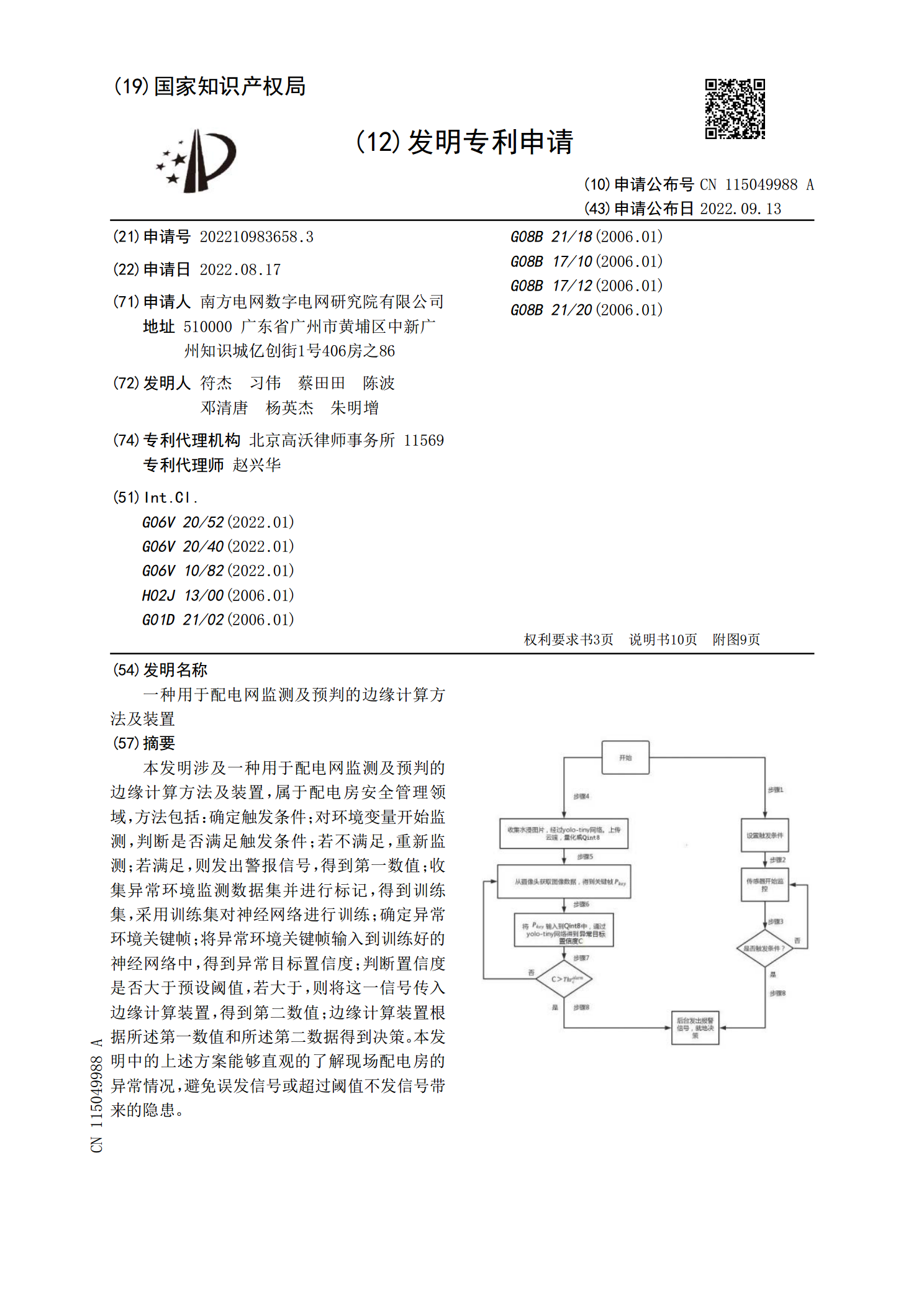
本发明涉及一种用于配电网监测及预判的边缘计算方法及装置,属于配电房安全管理领域,方法包括:确定触发条件;对环境变量开始监测,判断是否满足触发条件;若不满足,重新监测;若满足,则发出警报信号,得到第一数值;收集异常环境监测数据集并进行标记,得到训练集,采用训练集对神经网络进行训练;确定异常环境关键帧;将异常环境关键帧输入到训练好的神经网络中,得到异常目标置信度;判断置信度是否大于预设阈值,若大于,则将这一信号传入边缘计算装置,得到第二数值;边缘计算装置根据所述第一数值和所述第二数据得到决策。本发明中的上述方