
测温取样机器人的路径规划方法、系统及可读存储介质.pdf

星菱****23


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
测温取样机器人的路径规划方法、系统及可读存储介质.pdf
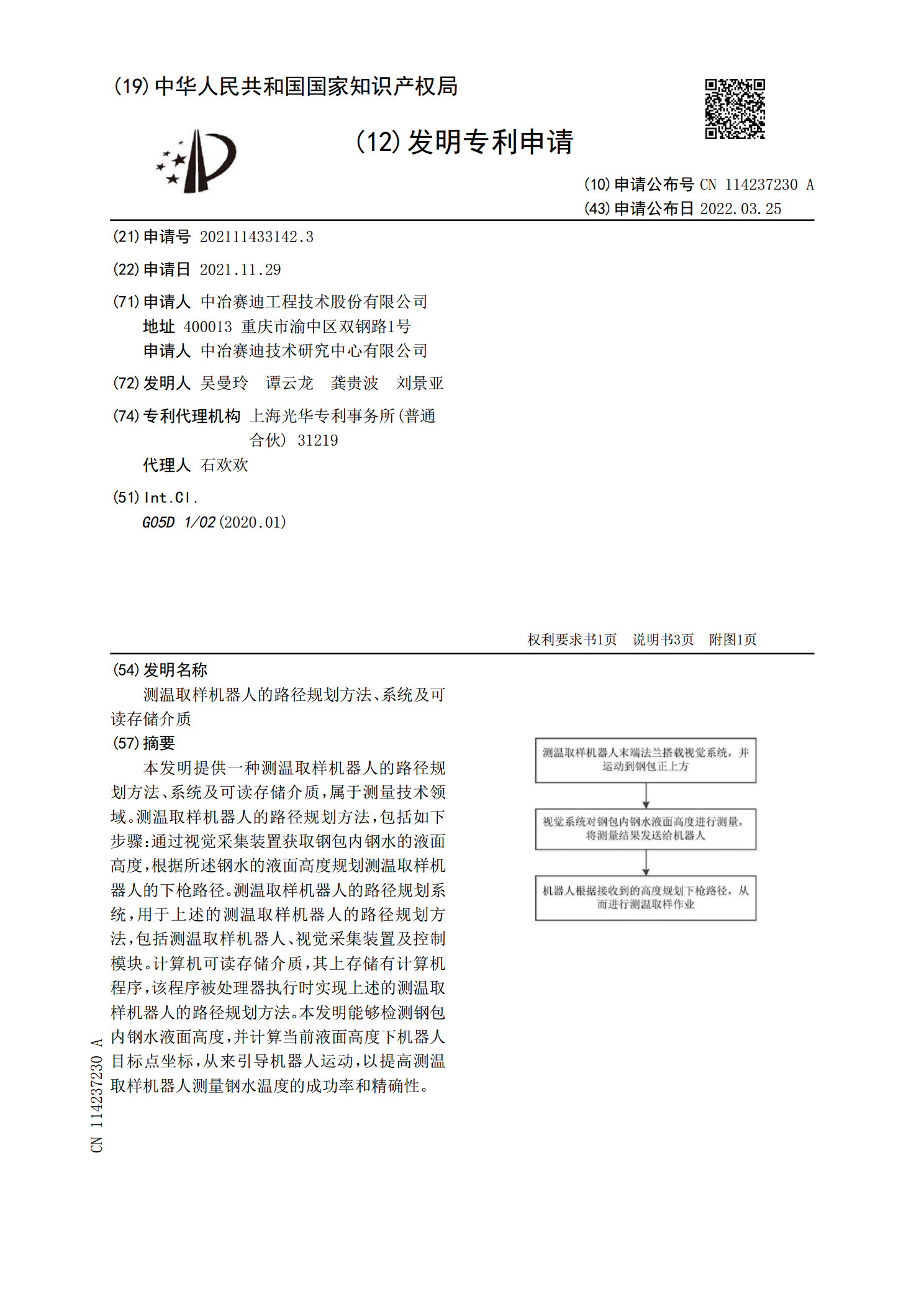
本发明提供一种测温取样机器人的路径规划方法、系统及可读存储介质,属于测量技术领域。测温取样机器人的路径规划方法,包括如下步骤:通过视觉采集装置获取钢包内钢水的液面高度,根据所述钢水的液面高度规划测温取样机器人的下枪路径。测温取样机器人的路径规划系统,用于上述的测温取样机器人的路径规划方法,包括测温取样机器人、视觉采集装置及控制模块。计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述的测温取样机器人的路径规划方法。本发明能够检测钢包内钢水液面高度,并计算当前液面高度下机器人目标点坐标,从

机器人局部路径规划方法、系统和可读存储介质.pdf
本发明涉及机器人局部路径规划方法、系统和可读存储介质,其中机器人局部路径规划方法包括:获取机器人从初始位置到达目标位置的全局路径,全局路径为全局路径点的集合;对全局路径点进行采样,以得到一组全局采样点;将所述每个全局采样点在与全局路径垂直的方向上平移至少两次,每平移一次,则获取一组局部采样点,其中平移的距离在预设的平移距离阈值范围内;对所述每组局部采样点分别进行曲线拟合,以得到多条初始局部路径;获取障碍物信息,并根据障碍物信息对每一条初始局部路径进行评价,以筛选并输出局部路径。通过本发明的技术方案规划的局
导航路径规划方法、系统和可读存储介质.pdf
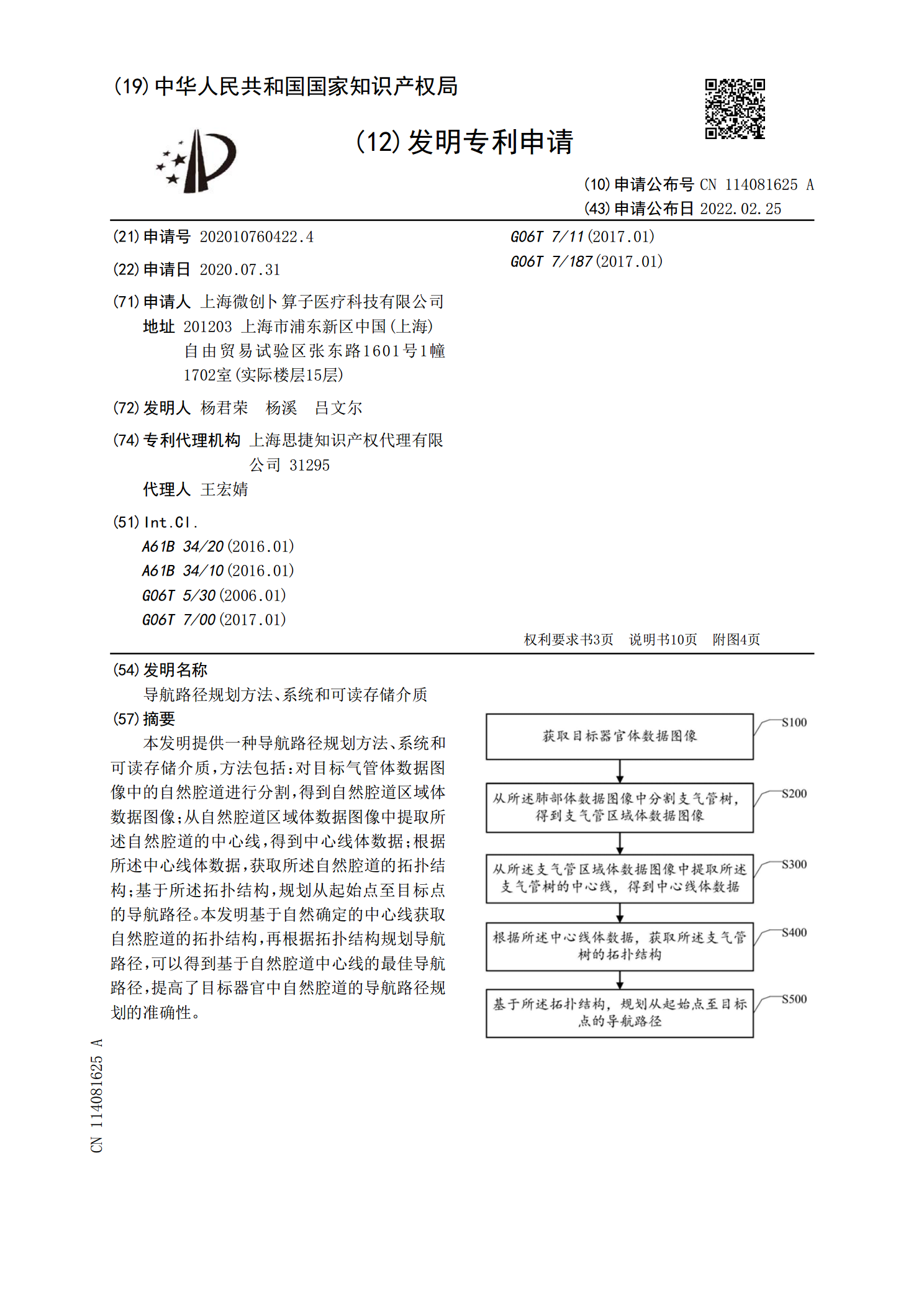
本发明提供一种导航路径规划方法、系统和可读存储介质,方法包括:对目标气管体数据图像中的自然腔道进行分割,得到自然腔道区域体数据图像;从自然腔道区域体数据图像中提取所述自然腔道的中心线,得到中心线体数据;根据所述中心线体数据,获取所述自然腔道的拓扑结构;基于所述拓扑结构,规划从起始点至目标点的导航路径。本发明基于自然确定的中心线获取自然腔道的拓扑结构,再根据拓扑结构规划导航路径,可以得到基于自然腔道中心线的最佳导航路径,提高了目标器官中自然腔道的导航路径规划的准确性。

导航路径规划方法、系统和可读存储介质.pdf
本发明提供一种导航路径规划方法、系统和可读存储介质,所述方法包括:获取目标器官体数据图像;对目标器官体数据图像中的自然腔道进行分割,以得到自然腔道区域体数据图像;对自然腔道区域体数据图像中的每一自然腔道区域像素点进行3D距离变换,得到自然腔道距离变换体数据;根据自然腔道距离变换体数据,基于代价函数最小化,在自然腔道区域体数据图像上进行迭代,搜索出从起始点至目标点的目标路径,得到规划的导航路径。本发明采用基于代价函数进行最小优化迭代的方式搜索从起始点至目标点的最佳路径,得到基于自然腔道中心线的最佳导航路径,
路径规划方法和系统、电子设备及可读存储介质.pdf
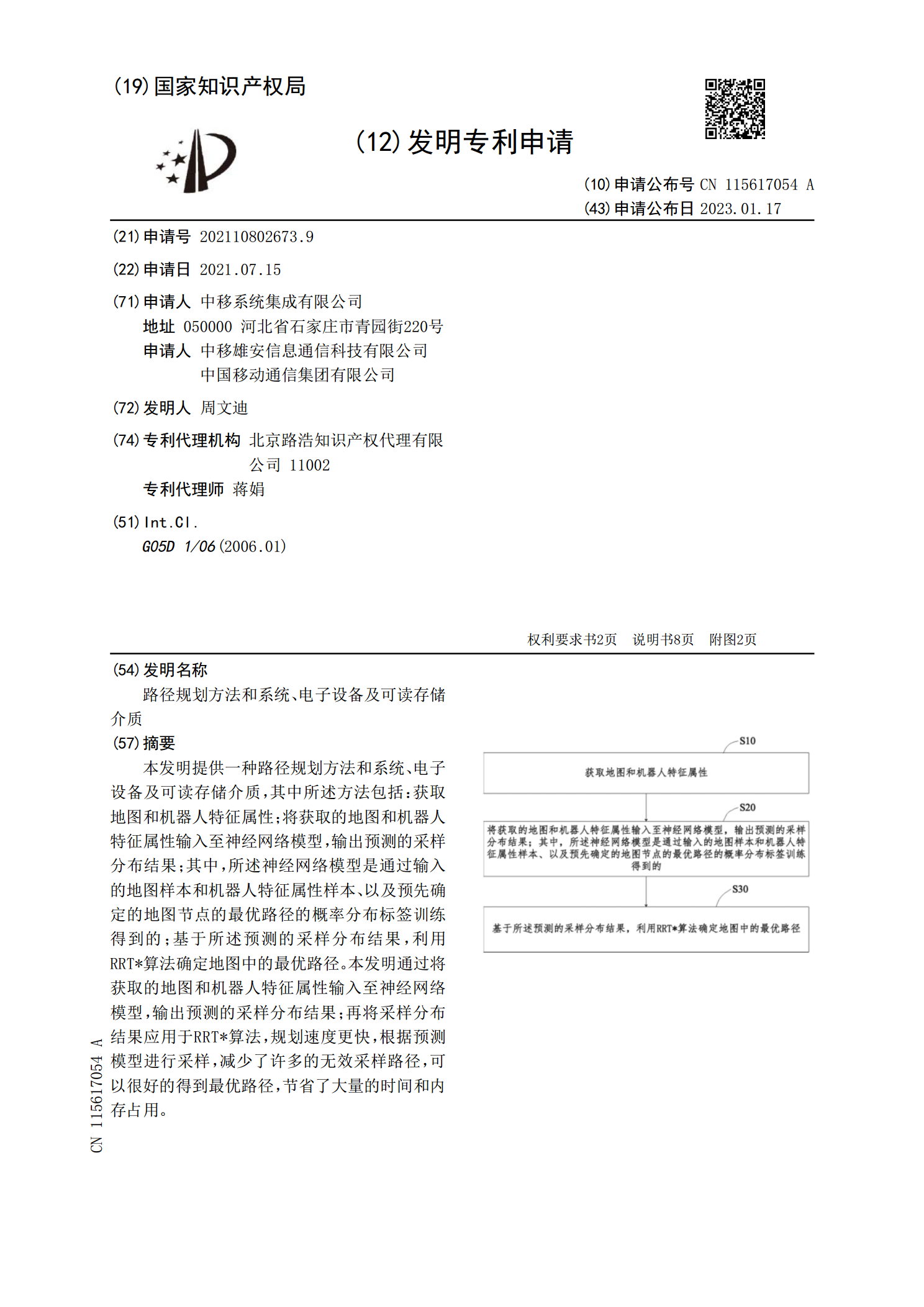
本发明提供一种路径规划方法和系统、电子设备及可读存储介质,其中所述方法包括:获取地图和机器人特征属性;将获取的地图和机器人特征属性输入至神经网络模型,输出预测的采样分布结果;其中,所述神经网络模型是通过输入的地图样本和机器人特征属性样本、以及预先确定的地图节点的最优路径的概率分布标签训练得到的;基于所述预测的采样分布结果,利用RRT*算法确定地图中的最优路径。本发明通过将获取的地图和机器人特征属性输入至神经网络模型,输出预测的采样分布结果;再将采样分布结果应用于RRT*算法,规划速度更快,根据预测模型进行