
机器人抓取数据集的构建方法及其构建装置和存储介质.pdf

建英****66

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人抓取数据集的构建方法及其构建装置和存储介质.pdf
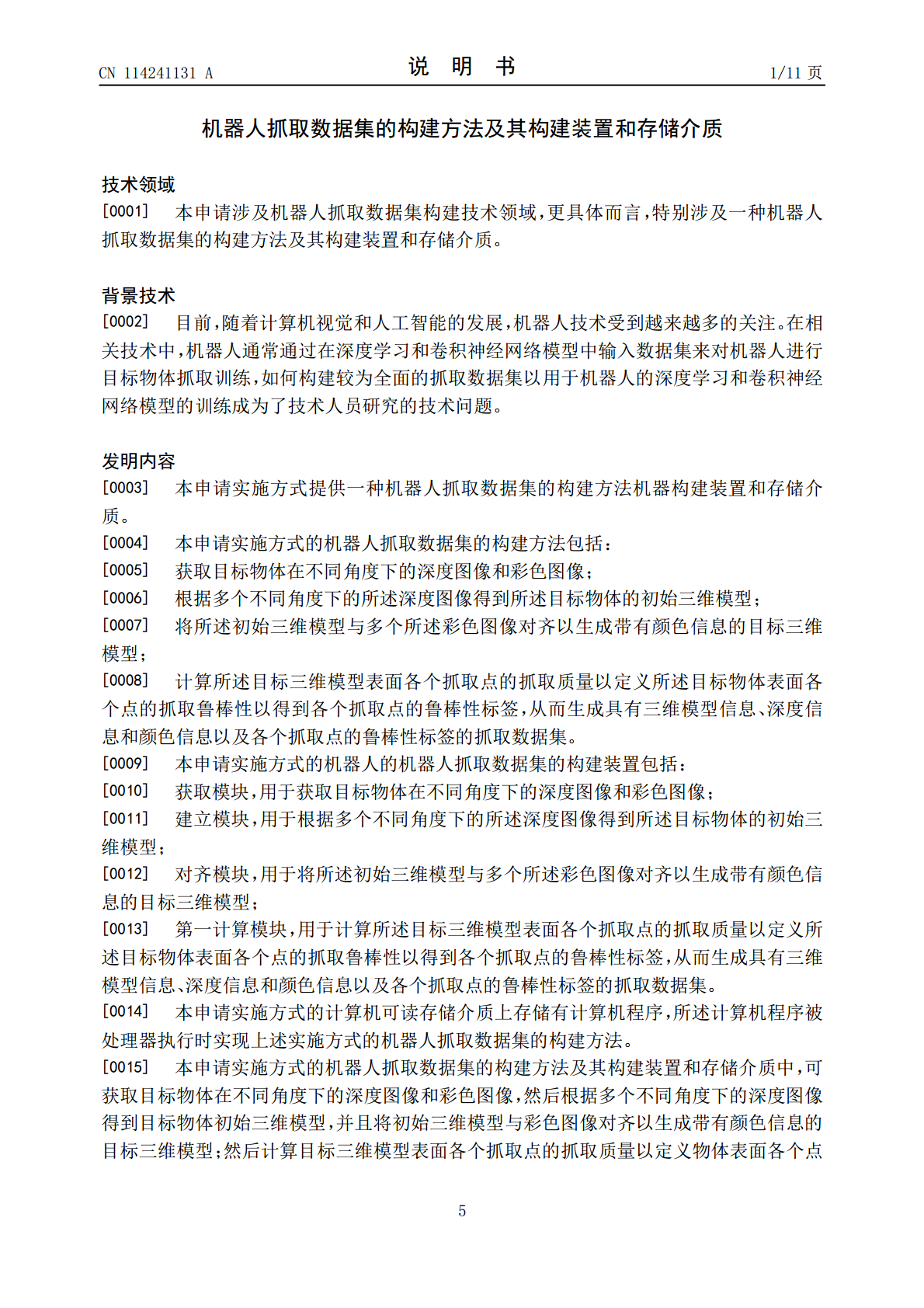
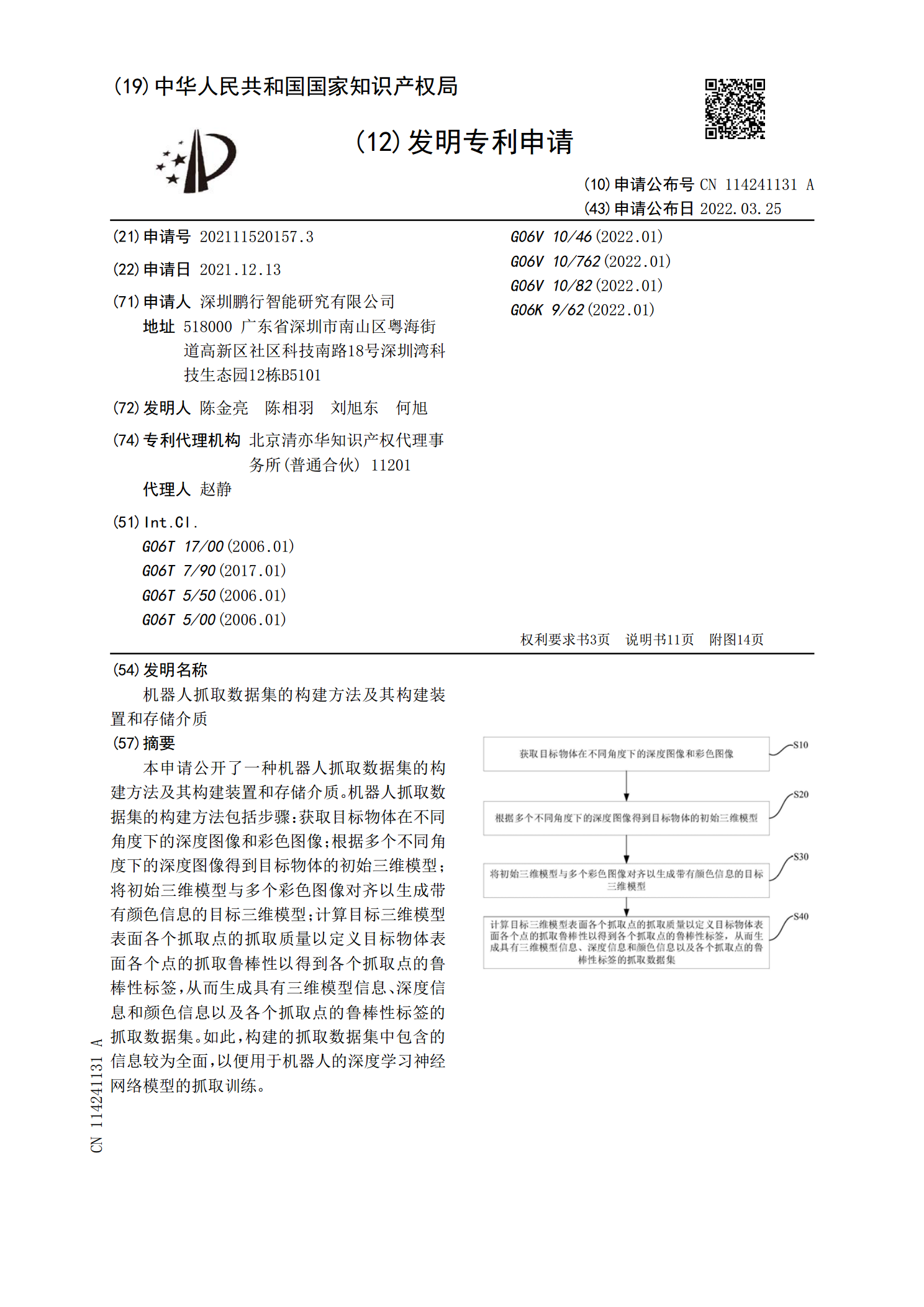
本申请公开了一种机器人抓取数据集的构建方法及其构建装置和存储介质。机器人抓取数据集的构建方法包括步骤:获取目标物体在不同角度下的深度图像和彩色图像;根据多个不同角度下的深度图像得到目标物体的初始三维模型;将初始三维模型与多个彩色图像对齐以生成带有颜色信息的目标三维模型;计算目标三维模型表面各个抓取点的抓取质量以定义目标物体表面各个点的抓取鲁棒性以得到各个抓取点的鲁棒性标签,从而生成具有三维模型信息、深度信息和颜色信息以及各个抓取点的鲁棒性标签的抓取数据集。如此,构建的抓取数据集中包含的信息较为全面,以便用
地图构建方法、地图构建装置、配送机器人及存储介质.pdf
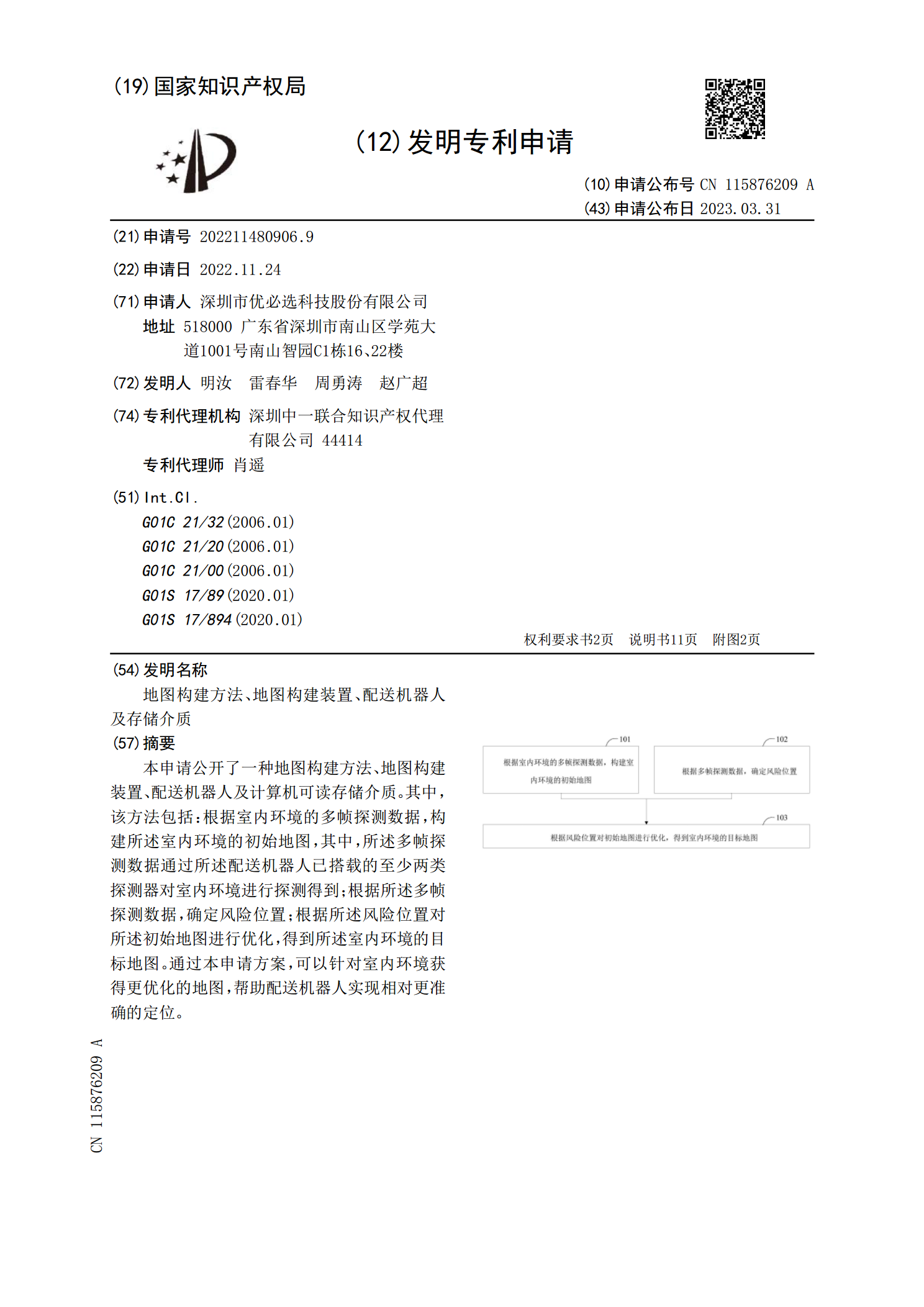
本申请公开了一种地图构建方法、地图构建装置、配送机器人及计算机可读存储介质。其中,该方法包括:根据室内环境的多帧探测数据,构建所述室内环境的初始地图,其中,所述多帧探测数据通过所述配送机器人已搭载的至少两类探测器对室内环境进行探测得到;根据所述多帧探测数据,确定风险位置;根据所述风险位置对所述初始地图进行优化,得到所述室内环境的目标地图。通过本申请方案,可以针对室内环境获得更优化的地图,帮助配送机器人实现相对更准确的定位。
页面构建方法、装置、设备和存储介质.pdf
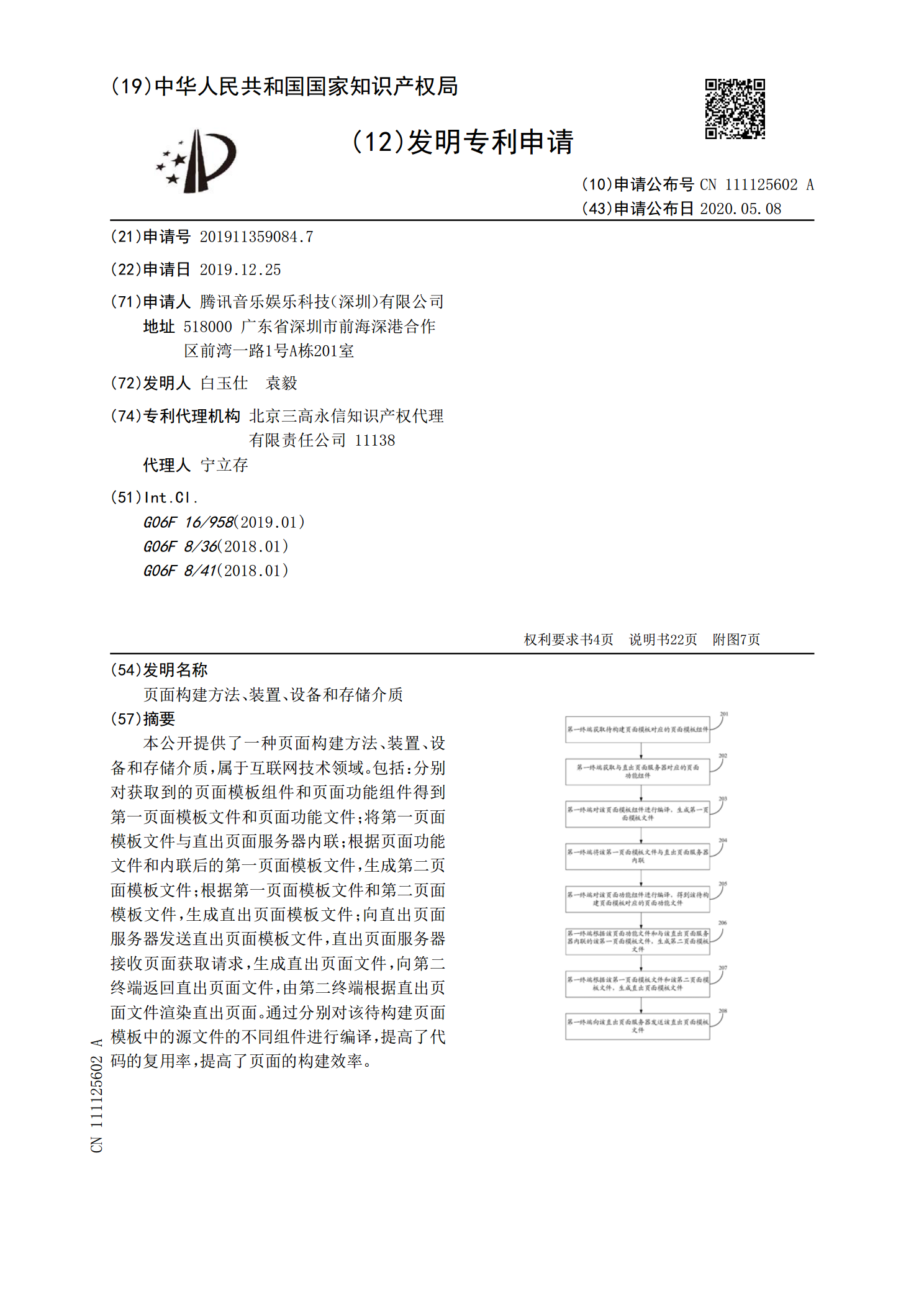
本公开提供了一种页面构建方法、装置、设备和存储介质,属于互联网技术领域。包括:分别对获取到的页面模板组件和页面功能组件得到第一页面模板文件和页面功能文件;将第一页面模板文件与直出页面服务器内联;根据页面功能文件和内联后的第一页面模板文件,生成第二页面模板文件;根据第一页面模板文件和第二页面模板文件,生成直出页面模板文件;向直出页面服务器发送直出页面模板文件,直出页面服务器接收页面获取请求,生成直出页面文件,向第二终端返回直出页面文件,由第二终端根据直出页面文件渲染直出页面。通过分别对该待构建页面模板中的源
数据模型构建方法、数据模型构建装置以及可读存储介质.pdf
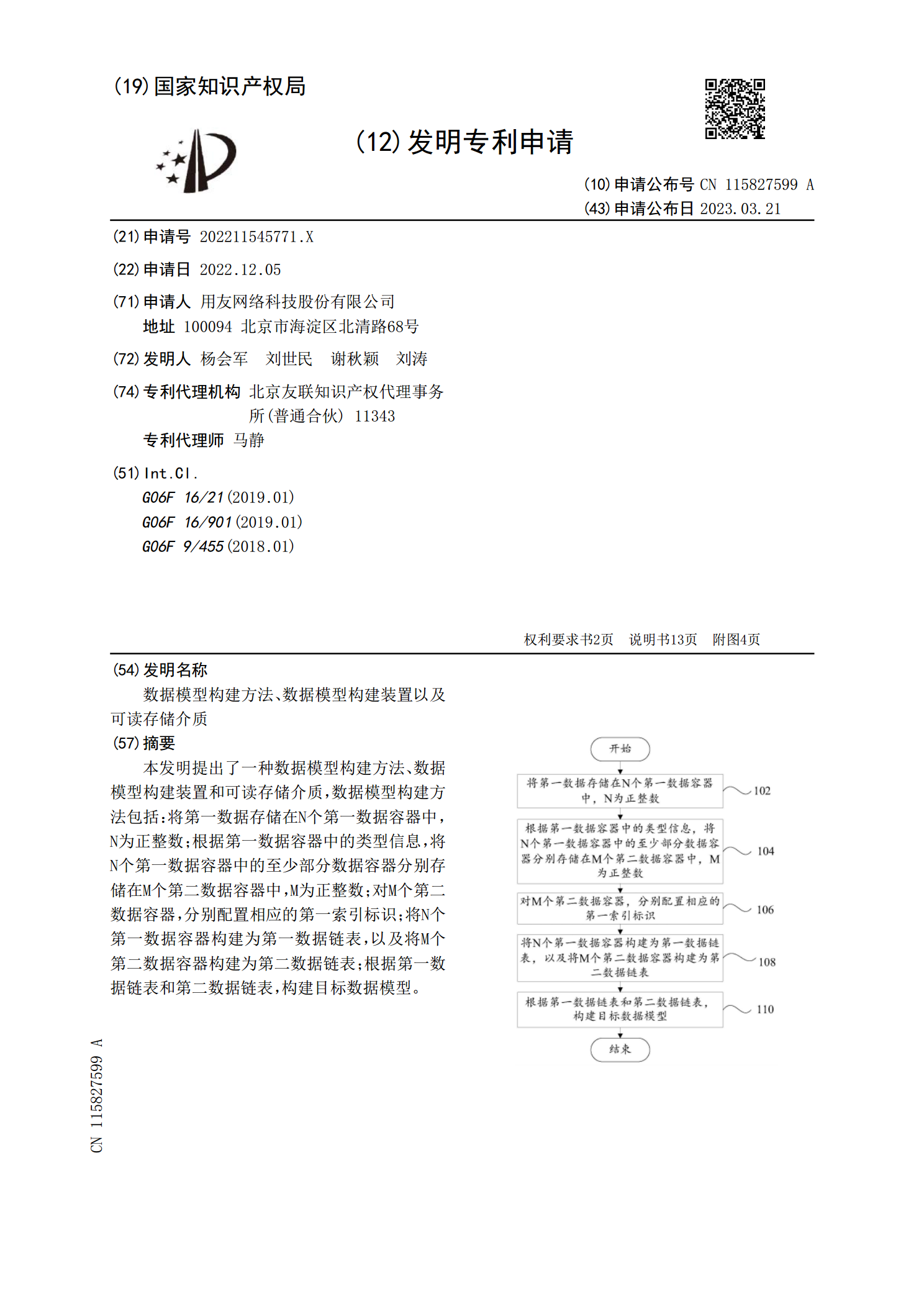
本发明提出了一种数据模型构建方法、数据模型构建装置和可读存储介质,数据模型构建方法包括:将第一数据存储在N个第一数据容器中,N为正整数;根据第一数据容器中的类型信息,将N个第一数据容器中的至少部分数据容器分别存储在M个第二数据容器中,M为正整数;对M个第二数据容器,分别配置相应的第一索引标识;将N个第一数据容器构建为第一数据链表,以及将M个第二数据容器构建为第二数据链表;根据第一数据链表和第二数据链表,构建目标数据模型。
构建方法、构建装置、电子装置和计算机可读存储介质.pdf
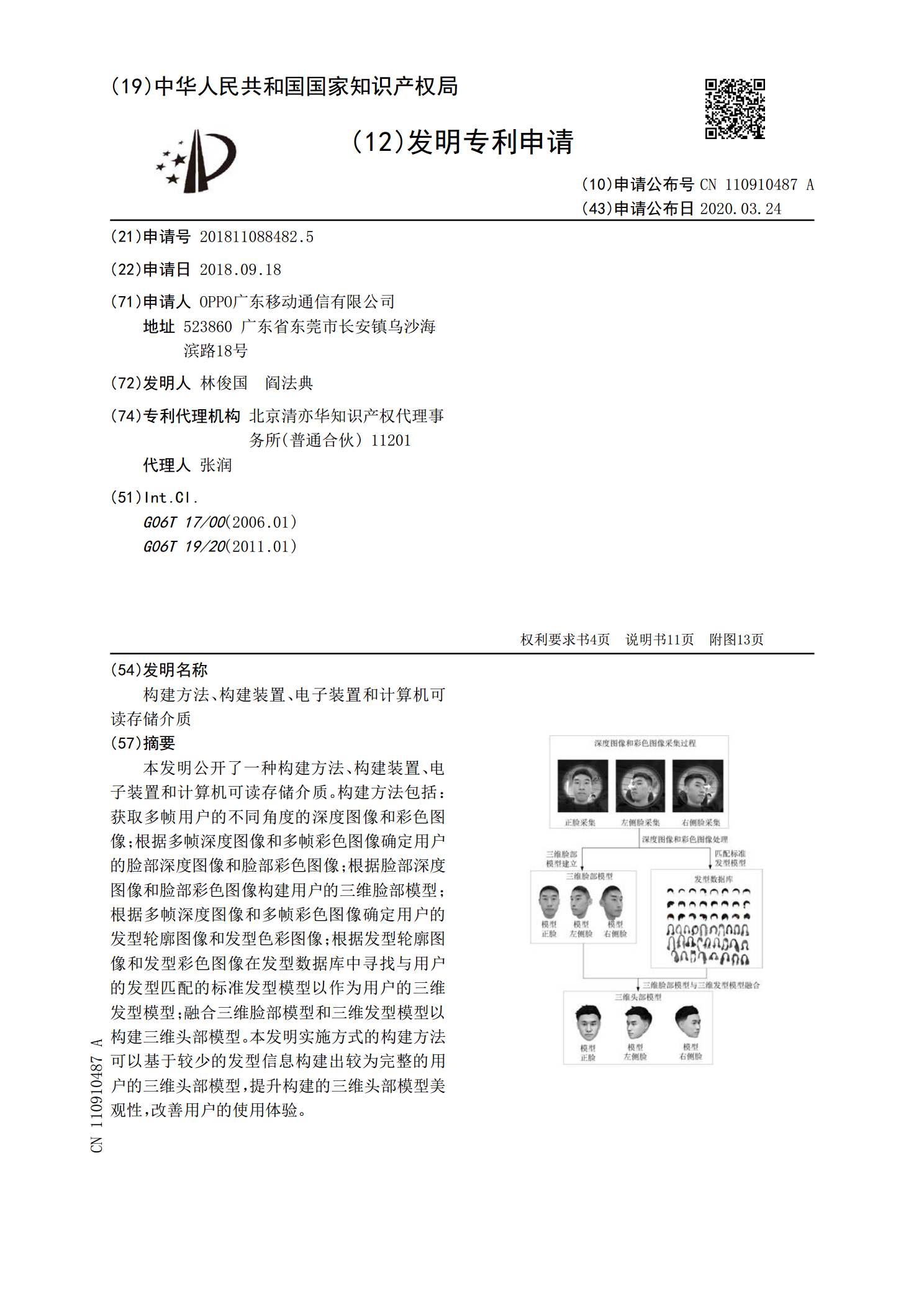
本发明公开了一种构建方法、构建装置、电子装置和计算机可读存储介质。构建方法包括:获取多帧用户的不同角度的深度图像和彩色图像;根据多帧深度图像和多帧彩色图像确定用户的脸部深度图像和脸部彩色图像;根据脸部深度图像和脸部彩色图像构建用户的三维脸部模型;根据多帧深度图像和多帧彩色图像确定用户的发型轮廓图像和发型色彩图像;根据发型轮廓图像和发型彩色图像在发型数据库中寻找与用户的发型匹配的标准发型模型以作为用户的三维发型模型;融合三维脸部模型和三维发型模型以构建三维头部模型。本发明实施方式的构建方法可以基于较少的发型