
连接控制方法、装置、设备及存储介质.pdf

一只****呀淑


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
连接控制方法、装置、设备及存储介质.pdf
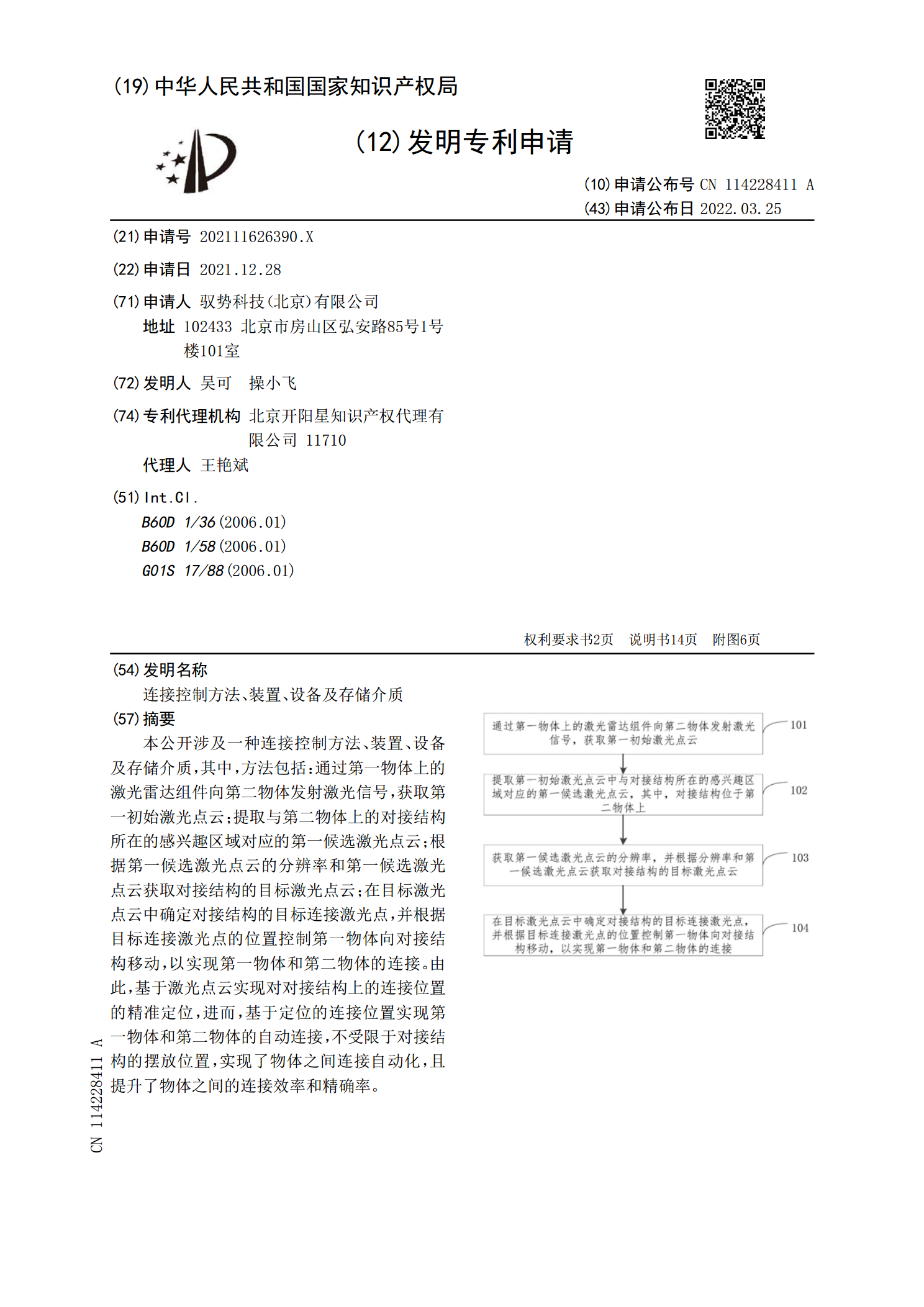
本公开涉及一种连接控制方法、装置、设备及存储介质,其中,方法包括:通过第一物体上的激光雷达组件向第二物体发射激光信号,获取第一初始激光点云;提取与第二物体上的对接结构所在的感兴趣区域对应的第一候选激光点云;根据第一候选激光点云的分辨率和第一候选激光点云获取对接结构的目标激光点云;在目标激光点云中确定对接结构的目标连接激光点,并根据目标连接激光点的位置控制第一物体向对接结构移动,以实现第一物体和第二物体的连接。由此,基于激光点云实现对对接结构上的连接位置的精准定位,进而,基于定位的连接位置实现第一物体和第二

设备连接方法、装置及存储介质.pdf
本申请实施例提供一种设备连接方法、装置及存储介质,该方法包括:终端设备根据智能设备的预设连接密码,与智能设备建立第一连接,并显示智能设备的标识信息;响应于检测到智能设备的标识信息的选择操作,终端设备向智能设备发送指示信息,智能设备根据指示信息指示的第一无线网络的名称和第一无线网络的密码,连接第一无线网络,终端设备在检测到智能设备连接至第一无线网络时,确定智能设备为终端设备当前管理的设备该方法与现有技术相比,终端设备与智能设备的初次连接的过程简单,连接效率高。
网络连接控制方法、装置、设备、存储介质及系统.pdf
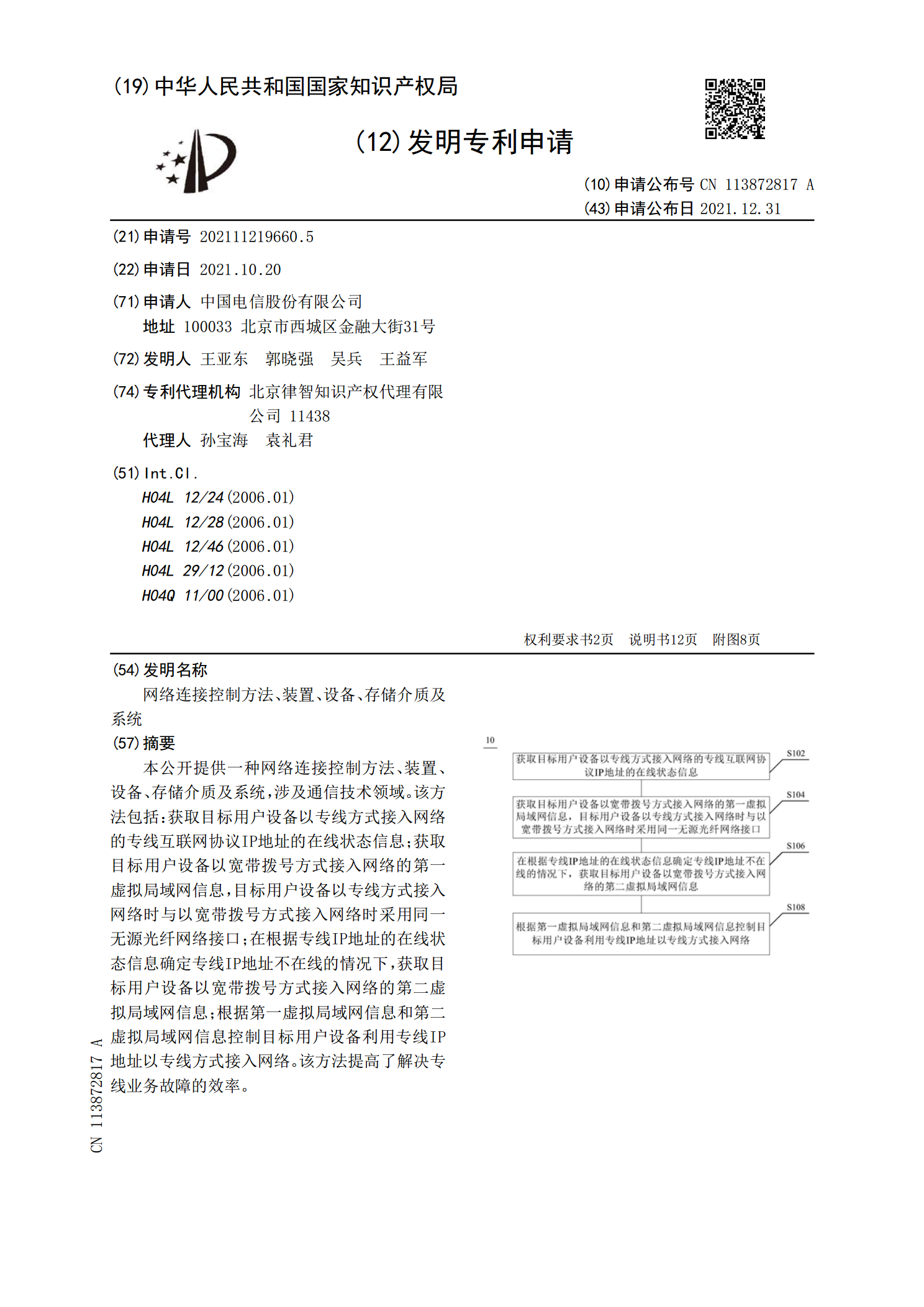
本公开提供一种网络连接控制方法、装置、设备、存储介质及系统,涉及通信技术领域。该方法包括:获取目标用户设备以专线方式接入网络的专线互联网协议IP地址的在线状态信息;获取目标用户设备以宽带拨号方式接入网络的第一虚拟局域网信息,目标用户设备以专线方式接入网络时与以宽带拨号方式接入网络时采用同一无源光纤网络接口;在根据专线IP地址的在线状态信息确定专线IP地址不在线的情况下,获取目标用户设备以宽带拨号方式接入网络的第二虚拟局域网信息;根据第一虚拟局域网信息和第二虚拟局域网信息控制目标用户设备利用专线IP地址以专

连接权限控制方法、装置、电子设备及存储介质.pdf
本申请提供了一种连接权限控制方法、装置、电子设备及存储介质。所述方法包括:响应于客户端发送的针对容器集群的访问请求,在建立与容器集群的后台系统的连接之前,获取客户端的互联网协议地址;调用地址写入模块,将互联网协议地址写入目标协议层地址选项内;在目标协议层地址选项内添加互联网协议地址的地址访问策略;在地址访问策略为允许访问策略的情况下,调用预置跟踪插件对互联网协议地址进行跟踪,得到客户端访问的容器集群内的目标容器,及客户端与目标容器之间的交互数据信息;根据交互数据信息和预置流控规则,对客户端与容器集群之间的
建立多连接的方法、装置、设备及存储介质.pdf
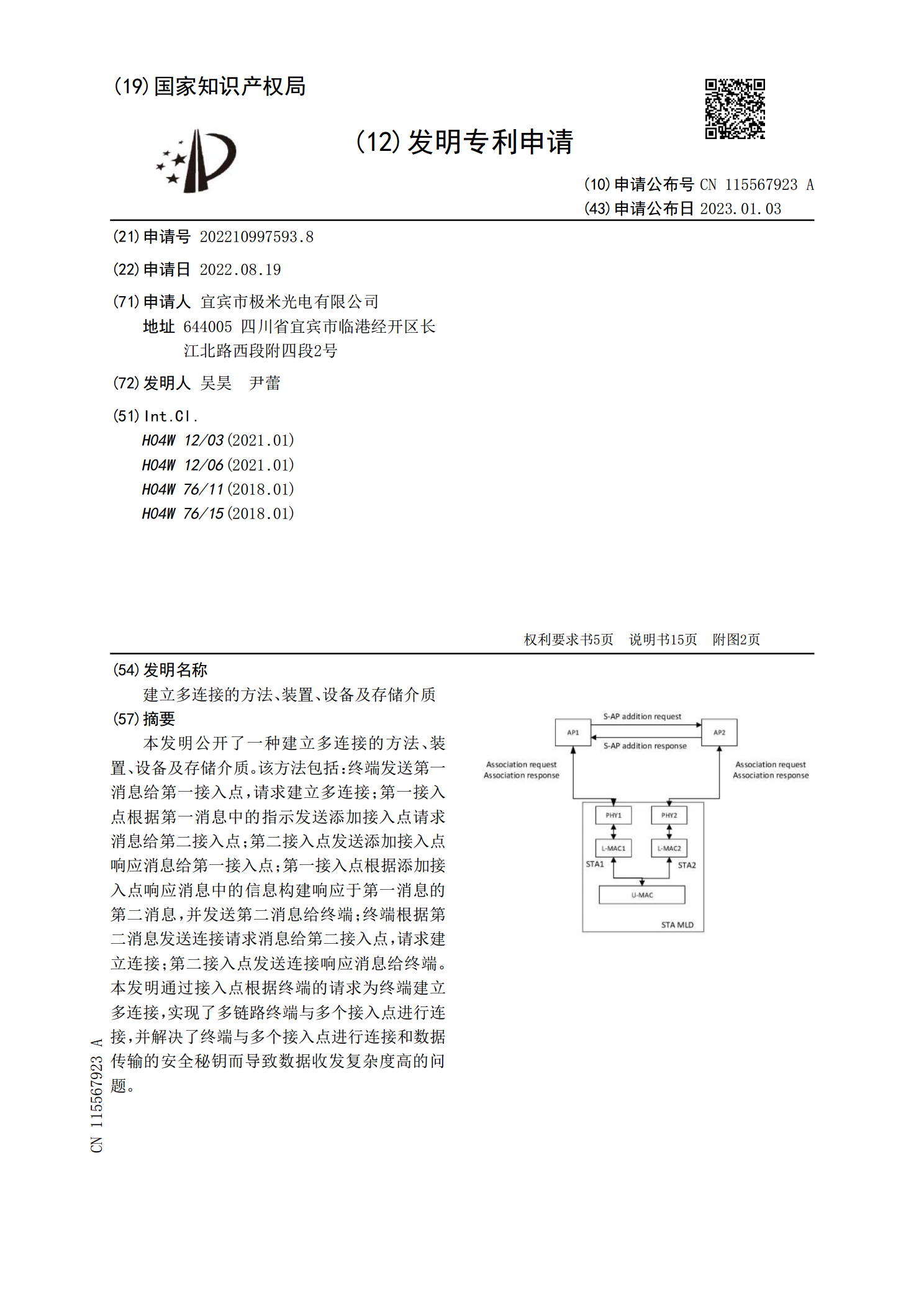
本发明公开了一种建立多连接的方法、装置、设备及存储介质。该方法包括:终端发送第一消息给第一接入点,请求建立多连接;第一接入点根据第一消息中的指示发送添加接入点请求消息给第二接入点;第二接入点发送添加接入点响应消息给第一接入点;第一接入点根据添加接入点响应消息中的信息构建响应于第一消息的第二消息,并发送第二消息给终端;终端根据第二消息发送连接请求消息给第二接入点,请求建立连接;第二接入点发送连接响应消息给终端。本发明通过接入点根据终端的请求为终端建立多连接,实现了多链路终端与多个接入点进行连接,并解决了终端