
地图数据抽稀方法、装置及存储介质.pdf

一只****生物


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
地图数据抽稀方法、装置及存储介质.pdf
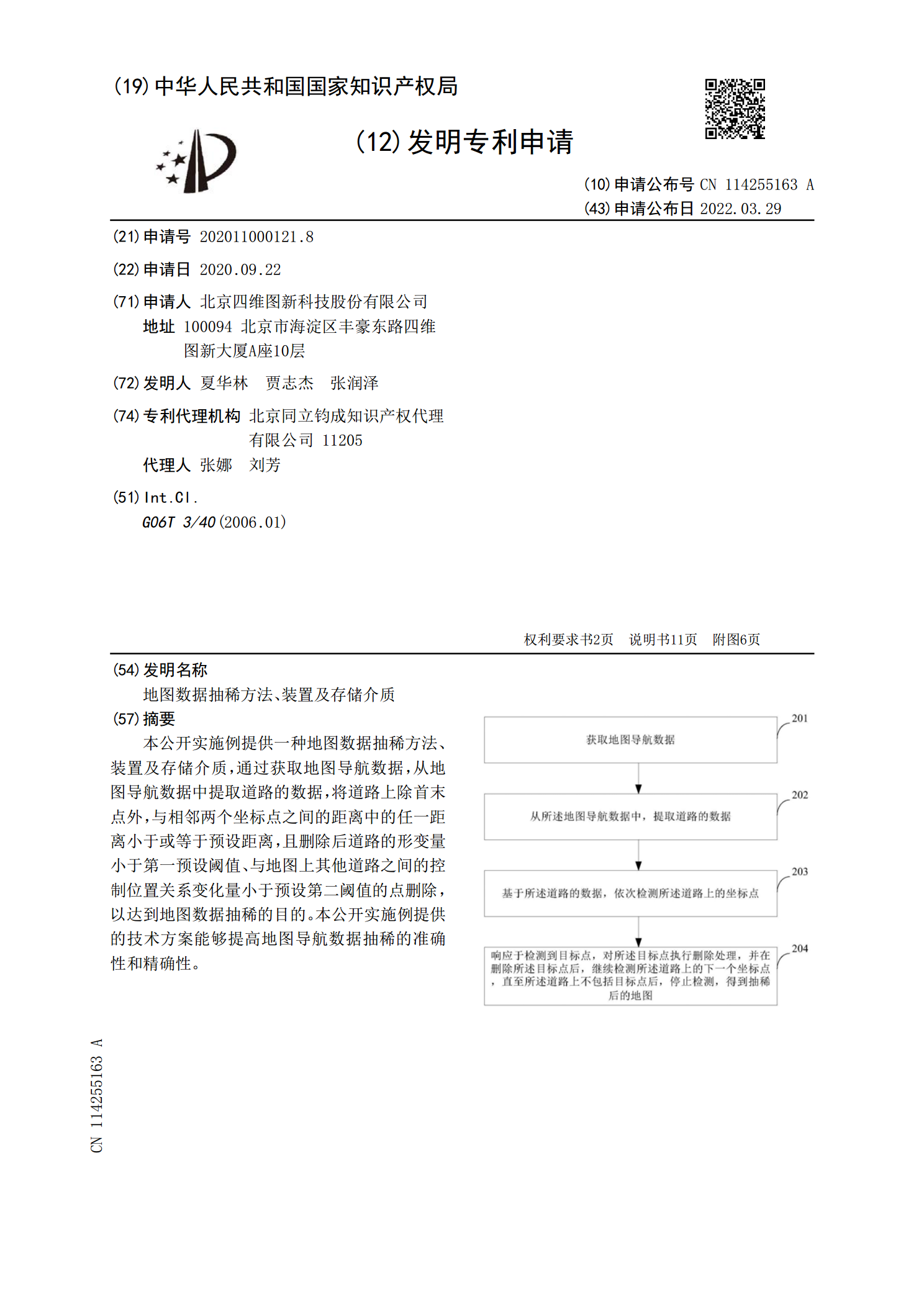
本公开实施例提供一种地图数据抽稀方法、装置及存储介质,通过获取地图导航数据,从地图导航数据中提取道路的数据,将道路上除首末点外,与相邻两个坐标点之间的距离中的任一距离小于或等于预设距离,且删除后道路的形变量小于第一预设阈值、与地图上其他道路之间的控制位置关系变化量小于预设第二阈值的点删除,以达到地图数据抽稀的目的。本公开实施例提供的技术方案能够提高地图导航数据抽稀的准确性和精确性。

地图覆盖物抽稀方法、装置、设备及计算机存储介质.pdf
本发明涉及金融科技(Fintech)技术领域,并公开了一种地图覆盖物抽稀方法,该方法包括:遍历地图中的所有覆盖物,将当前遍历的当前覆盖物与抽稀点列表中的抽稀点进行对比,基于所述对比结果确定所述抽稀点列表中的目标抽稀点;确定所述目标抽稀点与所述当前覆盖物之间的最小距离,并检测所述最小距离是否在所述目标抽稀点的抽稀范围内;若在,则将所述当前覆盖物放置在所述目标抽稀点中;在各所述覆盖物遍历完成时,获取各所述目标抽稀点在所述地图的抽稀点坐标,并将各所述抽稀点坐标渲染到所述地图。本发明还公开了一种地图覆盖物抽稀装置
地图数据的处理方法、装置、系统及存储介质.pdf
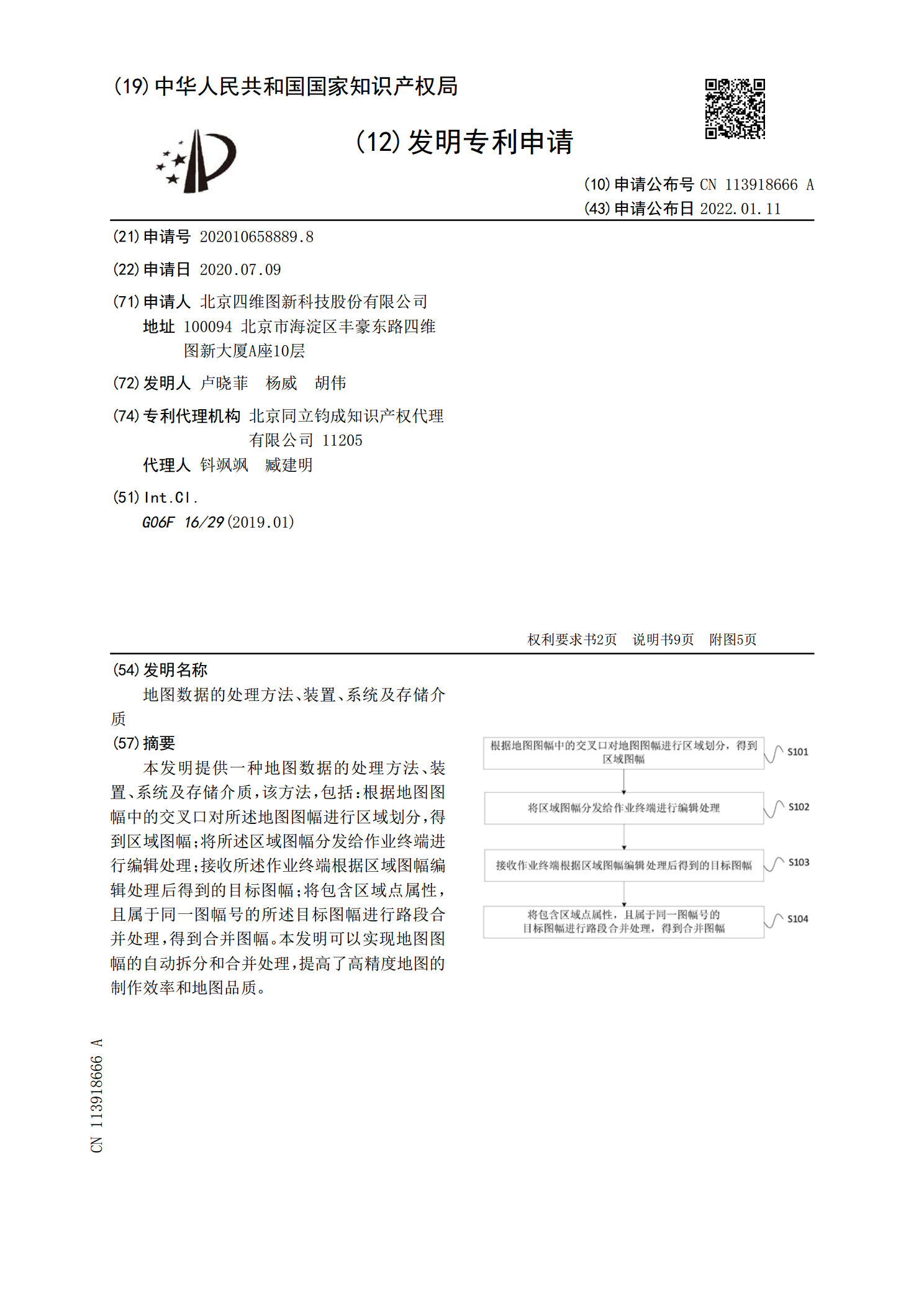
本发明提供一种地图数据的处理方法、装置、系统及存储介质,该方法,包括:根据地图图幅中的交叉口对所述地图图幅进行区域划分,得到区域图幅;将所述区域图幅分发给作业终端进行编辑处理;接收所述作业终端根据区域图幅编辑处理后得到的目标图幅;将包含区域点属性,且属于同一图幅号的所述目标图幅进行路段合并处理,得到合并图幅。本发明可以实现地图图幅的自动拆分和合并处理,提高了高精度地图的制作效率和地图品质。

钻孔数据抽稀方法和装置、设备及储存介质.pdf
本申请公开了一种钻孔数据抽稀方法,其方法包括如下步骤:获取钻孔数据集;其中,钻孔数据集包括多个钻孔数据及每个钻孔数据所对应的显示图层;显示图层的个数为m;对钻孔数据进行经纬度坐标换算,得到钻孔数据的像素索引;基于每一显示图层下钻孔数据的像素索引,生成对应显示图层下的抽稀格网;其中,抽稀格网的行数为p行,列数为q列;遍历每一显示图层下的抽稀格网中的每个子格,若子格内存在多个钻孔数据时,由多个钻孔数据中选取一个作为保留数据,得到抽稀处理后的钻孔数据。本公开的方法提高了处理速度,抽稀后的钻孔数据分布均匀,并且提
处理地图数据的方法、装置、设备、存储介质及程序产品.pdf
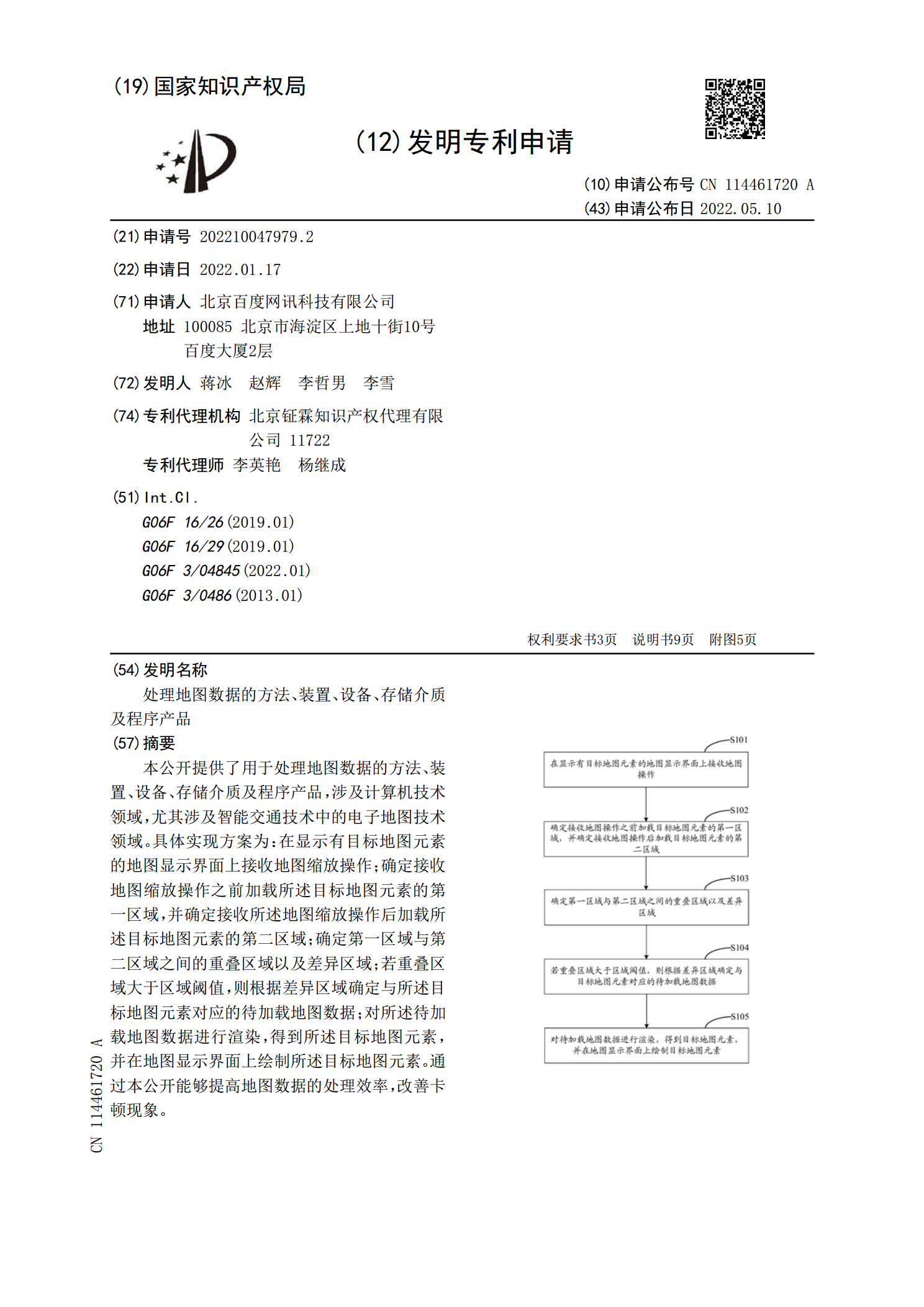
本公开提供了用于处理地图数据的方法、装置、设备、存储介质及程序产品,涉及计算机技术领域,尤其涉及智能交通技术中的电子地图技术领域。具体实现方案为:在显示有目标地图元素的地图显示界面上接收地图缩放操作;确定接收地图缩放操作之前加载所述目标地图元素的第一区域,并确定接收所述地图缩放操作后加载所述目标地图元素的第二区域;确定第一区域与第二区域之间的重叠区域以及差异区域;若重叠区域大于区域阈值,则根据差异区域确定与所述目标地图元素对应的待加载地图数据;对所述待加载地图数据进行渲染,得到所述目标地图元素,并在地图显