
多基站协同感知方法、装置、计算机设备和存储介质.pdf

代瑶****zy


1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共61页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多基站协同感知方法、装置、计算机设备和存储介质.pdf
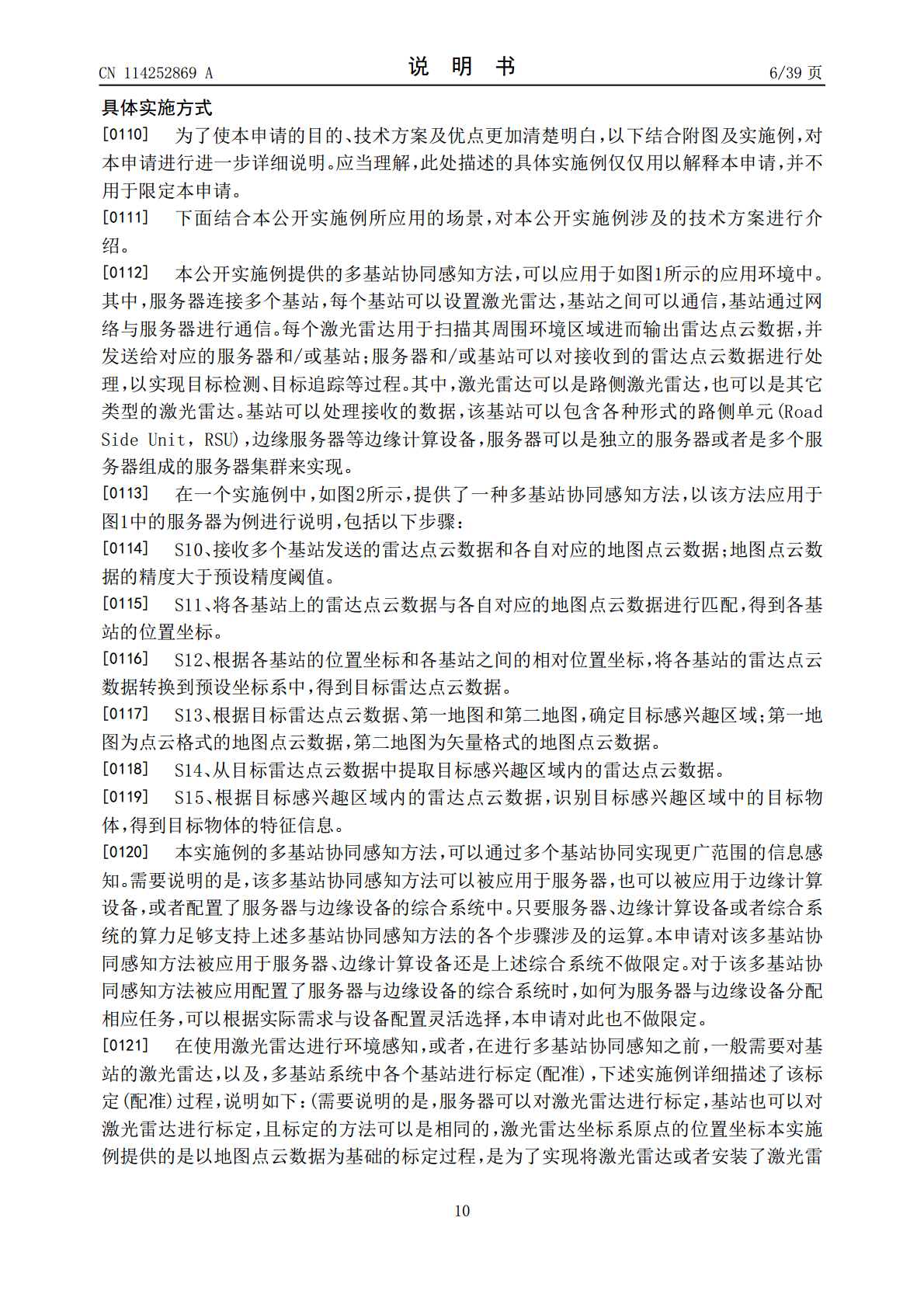
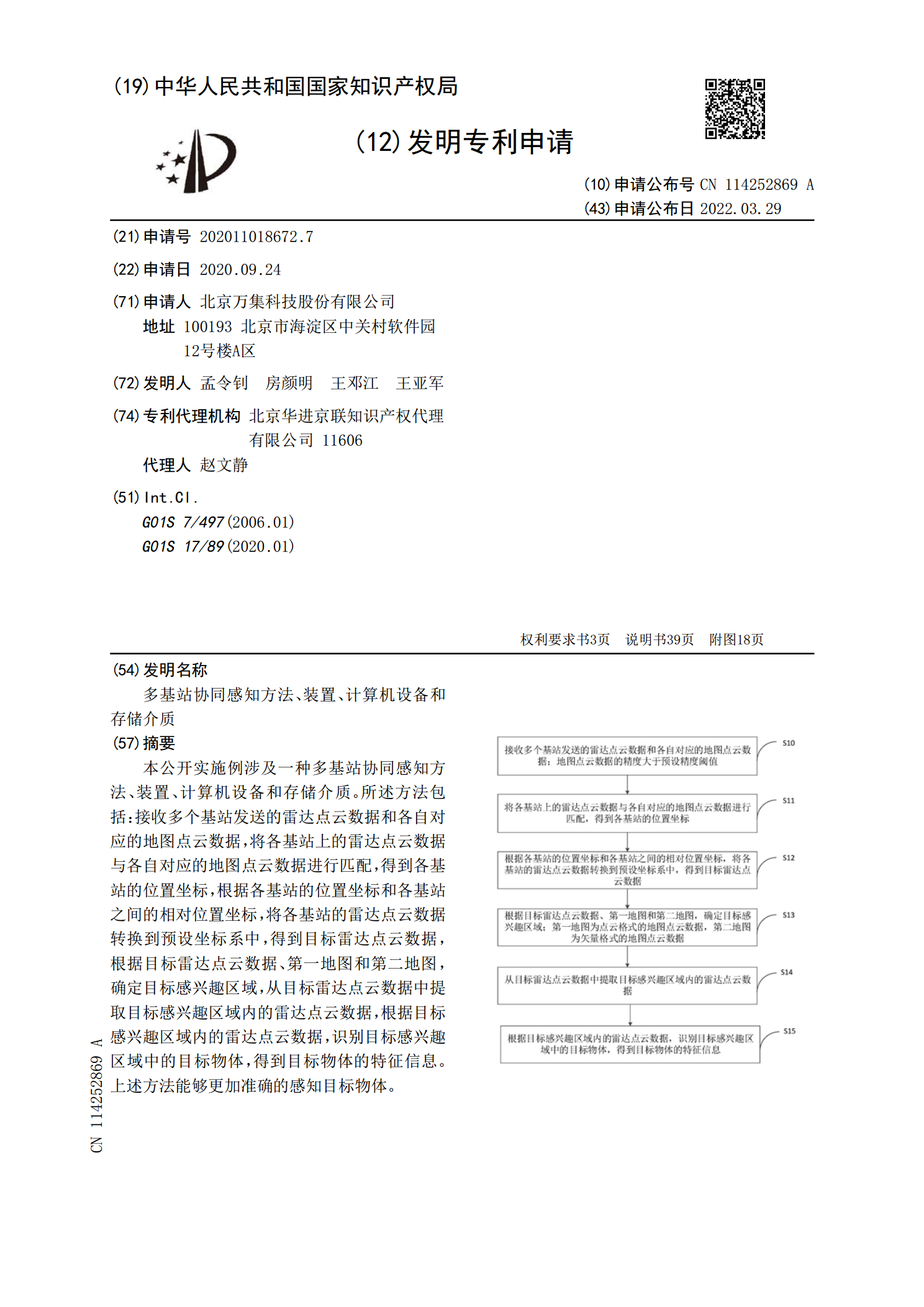
本公开实施例涉及一种多基站协同感知方法、装置、计算机设备和存储介质。所述方法包括:接收多个基站发送的雷达点云数据和各自对应的地图点云数据,将各基站上的雷达点云数据与各自对应的地图点云数据进行匹配,得到各基站的位置坐标,根据各基站的位置坐标和各基站之间的相对位置坐标,将各基站的雷达点云数据转换到预设坐标系中,得到目标雷达点云数据,根据目标雷达点云数据、第一地图和第二地图,确定目标感兴趣区域,从目标雷达点云数据中提取目标感兴趣区域内的雷达点云数据,根据目标感兴趣区域内的雷达点云数据,识别目标感兴趣区域中的目标

感知增强方法、装置、路侧基站、计算机设备和存储介质.pdf
本申请涉及一种感知增强方法、装置、路侧基站、计算机设备和存储介质。所述方法包括:对覆盖区域进行数据采集,得到包含目标对象的感知数据;将感知数据输入初始检测模型,得到目标对象的目标检测信息;接收目标对象发送的目标真实信息;目标真实信息与目标检测信息对应;迭代执行将感知数据输入初始检测模型,得到目标对象的目标检测信息,以及根据目标检测信息与目标真实信息之间的差异调整初始检测模型的参数的步骤,直至初始检测模型的网络层收敛,得到检测网络模型;检测网络模型用于对输入的感知数据进行处理得到感知增强结果。以目标真实信息

基站的节能方法、装置、基站和计算机可读存储介质.pdf
本公开涉及一种基站的节能方法、装置、基站和计算机可读存储介质,涉及无线通信技术领域。该方法包括:根据节能基站及其各相邻基站的当前业务数据,利用机器学习模型,预测节能基站的第一预测业务负荷,和各相邻基站的第一预测业务负荷,用于确定是否存在业务负荷增加的相邻基站;在存在业务负荷增加的相邻基站的情况下,根据该相邻基站的第一预测业务负荷,以及节能基站与该相邻基站之间的历史业务负荷变化信息,预测节能基站的第二预测业务负荷;根据节能基站的第一预测业务负荷和第二预测业务负荷,确定节能基站的预测业务负荷峰值;根据预测业务

基站选择控制方法及装置、基站和计算机可读存储介质.pdf
本发明提出了一种基站选择控制方法及装置、基站和计算机可读存储介质,其中,基站选择控制方法包括:根据相邻小区的标识信息,确定所述相邻小区所属基站的类型;判断服务小区所属基站的类型和所述相邻小区所属基站的类型是否相同;在确定所述服务小区所属基站的类型和所述相邻小区所属基站的类型不同时,设置所述服务小区所属基站和所述相邻小区所属基站两者之中第一类型基站的优先级高于第二类型基站的优先级。通过本发明的技术方案,使得终端方便快捷地直接重选到工作成本较低的微基站工作,增加了终端驻留在微基站的时长,降低了通信成本。
基站标定方法和装置、计算机设备以及存储介质.pdf
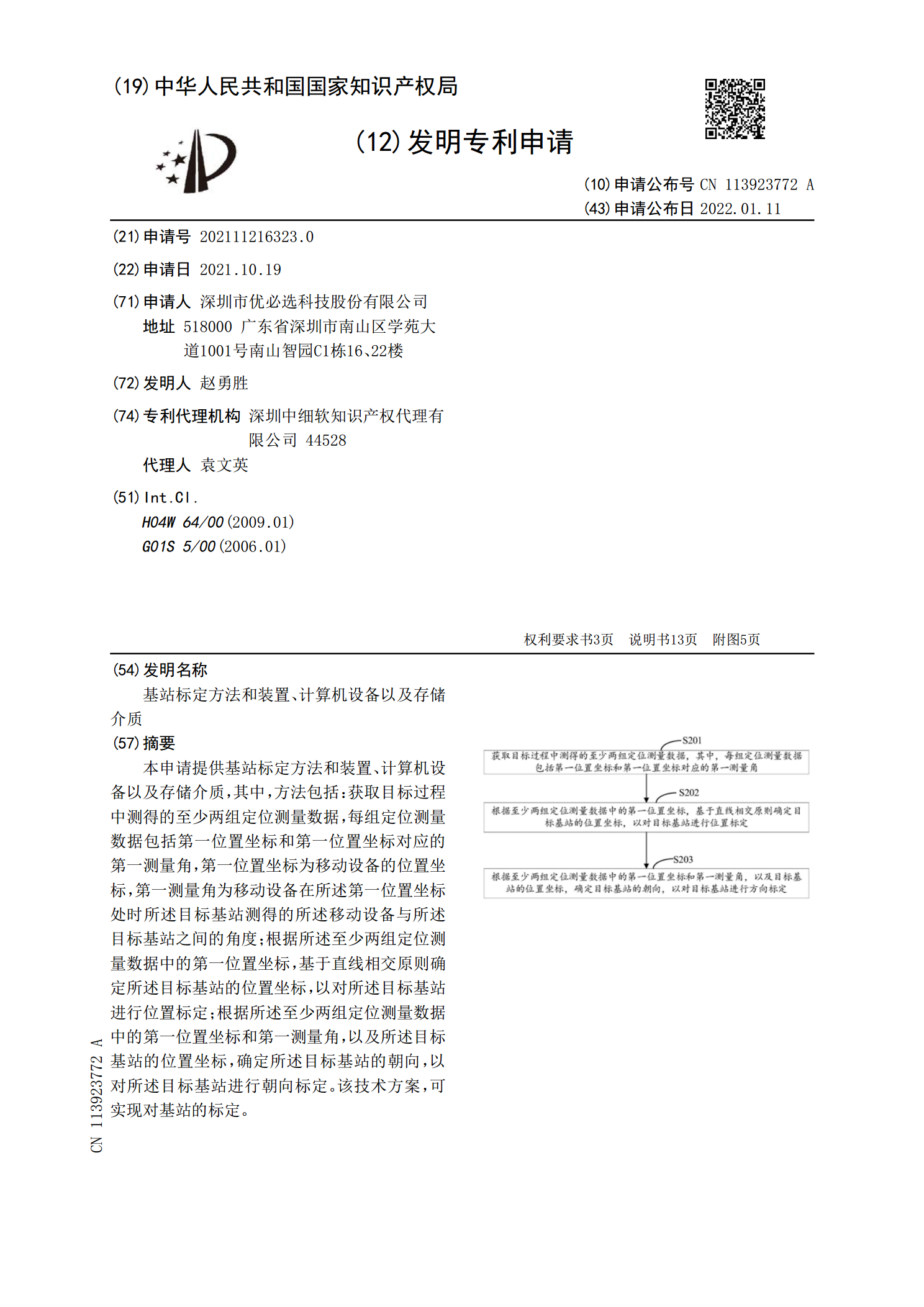
本申请提供基站标定方法和装置、计算机设备以及存储介质,其中,方法包括:获取目标过程中测得的至少两组定位测量数据,每组定位测量数据包括第一位置坐标和第一位置坐标对应的第一测量角,第一位置坐标为移动设备的位置坐标,第一测量角为移动设备在所述第一位置坐标处时所述目标基站测得的所述移动设备与所述目标基站之间的角度;根据所述至少两组定位测量数据中的第一位置坐标,基于直线相交原则确定所述目标基站的位置坐标,以对所述目标基站进行位置标定;根据所述至少两组定位测量数据中的第一位置坐标和第一测量角,以及所述目标基站的位置坐