
一种钢结构桥梁桁架自动焊接机器人.pdf

论文****酱吖


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种钢结构桥梁桁架自动焊接机器人.pdf
本发明公开一种钢结构桥梁桁架自动焊接机器人,涉及钢结构桥桁架焊接技术领域,包括机架,机架的底端固定设置有支撑气缸,机架的上下端分别滑动设置有焊接部件;机架上活动设置有角度调节部件,角度调节部件包括两个角度架,角度架活动安装在机架上,角度架上活动设置有驱动部件,角度架由驱动部件驱动,机架的端面上设置有限位孔,角度架上旋转设置有限位部件,限位部件与限位孔有配合关系,角度调节部件还包括两个连接板,两个连接板上滑动安装有用于夹持材料的夹持部件,连接板的两端滑动设置有测量部件;本发明解决了目前桁架焊接作业中,需要对
一种钢结构桥梁桁架自动焊接机器人.pdf
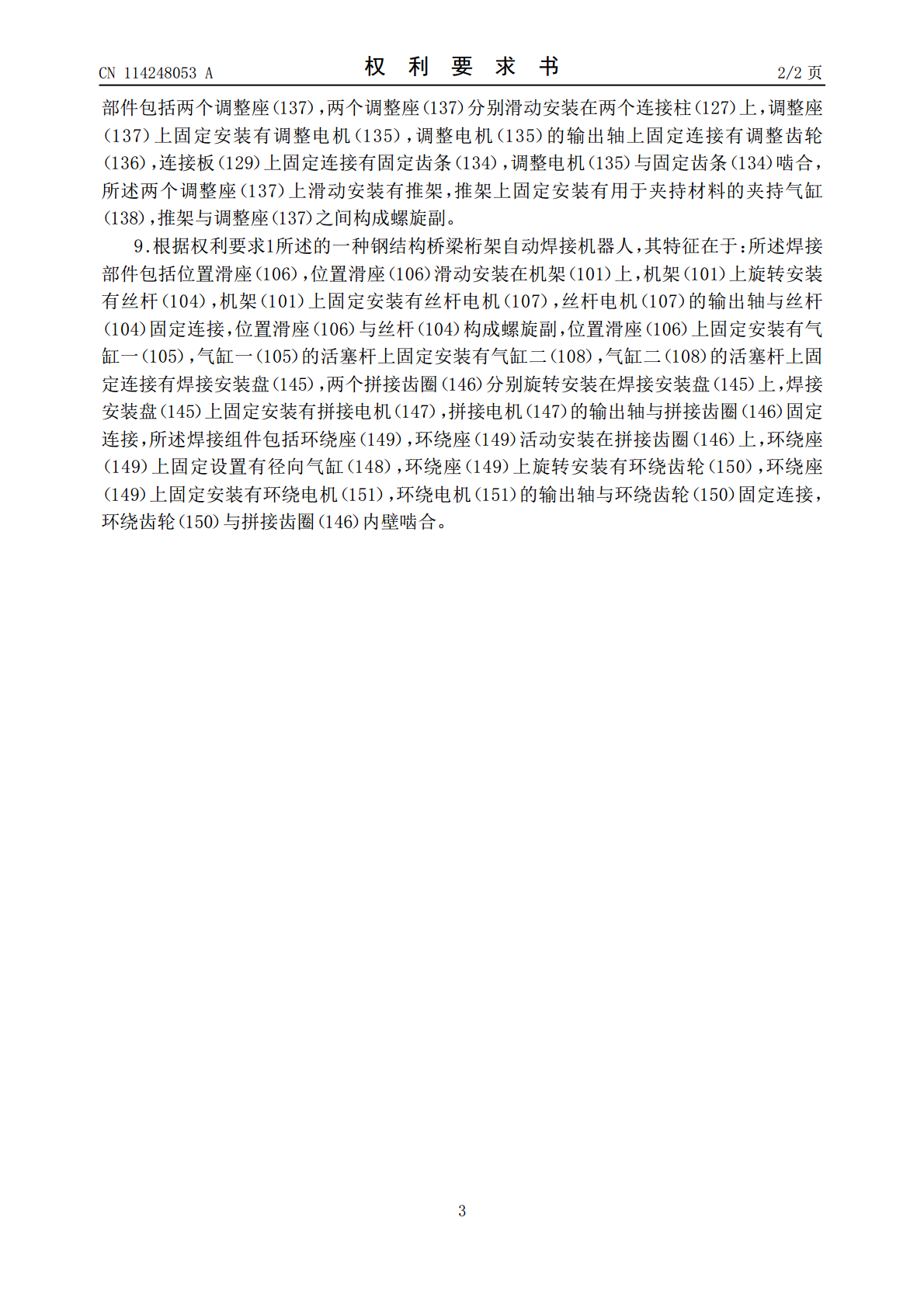
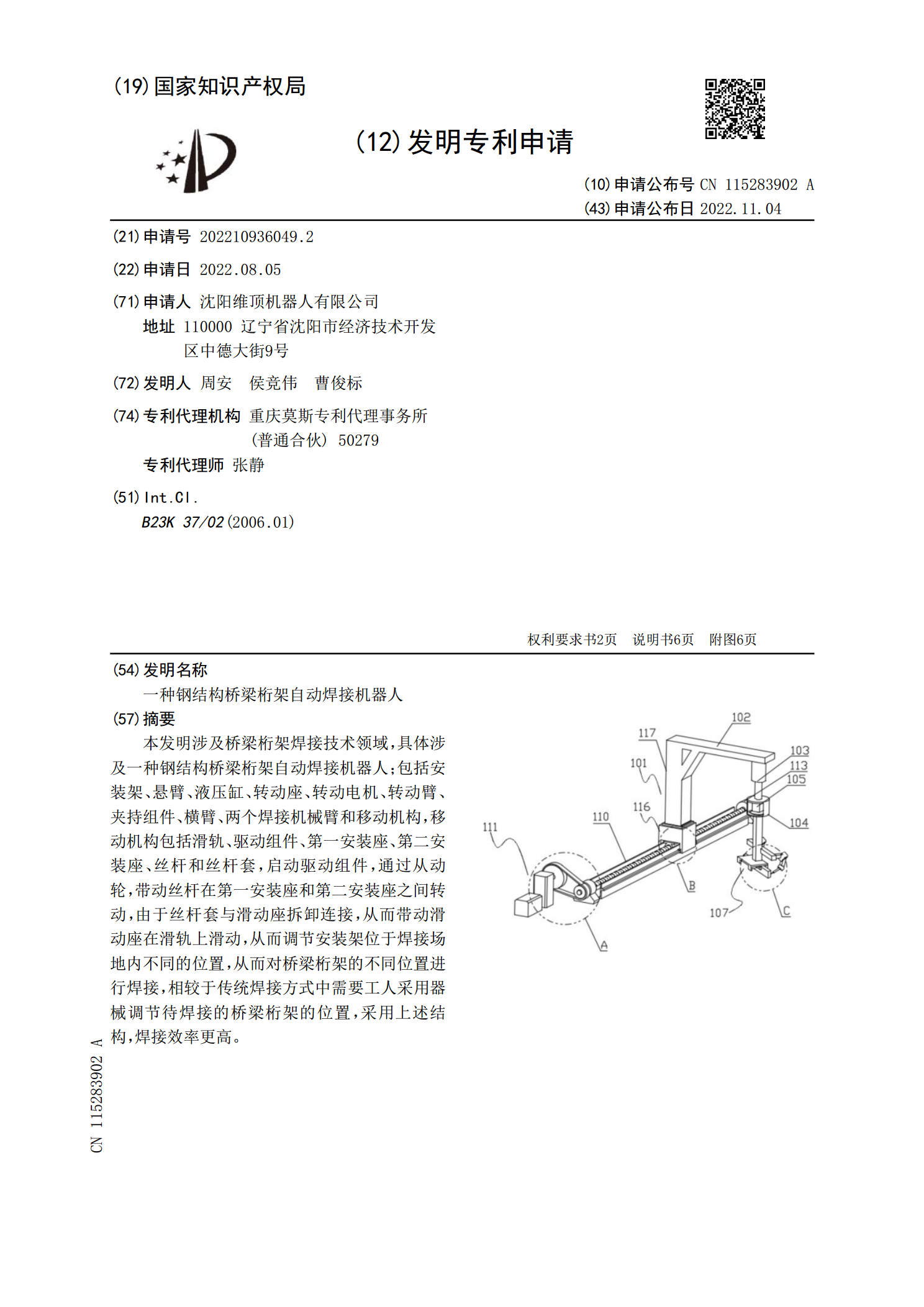
本发明涉及桥梁桁架焊接技术领域,具体涉及一种钢结构桥梁桁架自动焊接机器人;包括安装架、悬臂、液压缸、转动座、转动电机、转动臂、夹持组件、横臂、两个焊接机械臂和移动机构,移动机构包括滑轨、驱动组件、第一安装座、第二安装座、丝杆和丝杆套,启动驱动组件,通过从动轮,带动丝杆在第一安装座和第二安装座之间转动,由于丝杆套与滑动座拆卸连接,从而带动滑动座在滑轨上滑动,从而调节安装架位于焊接场地内不同的位置,从而对桥梁桁架的不同位置进行焊接,相较于传统焊接方式中需要工人采用器械调节待焊接的桥梁桁架的位置,采用上述结构,
一种钢结构桥梁桁架焊接装置.pdf
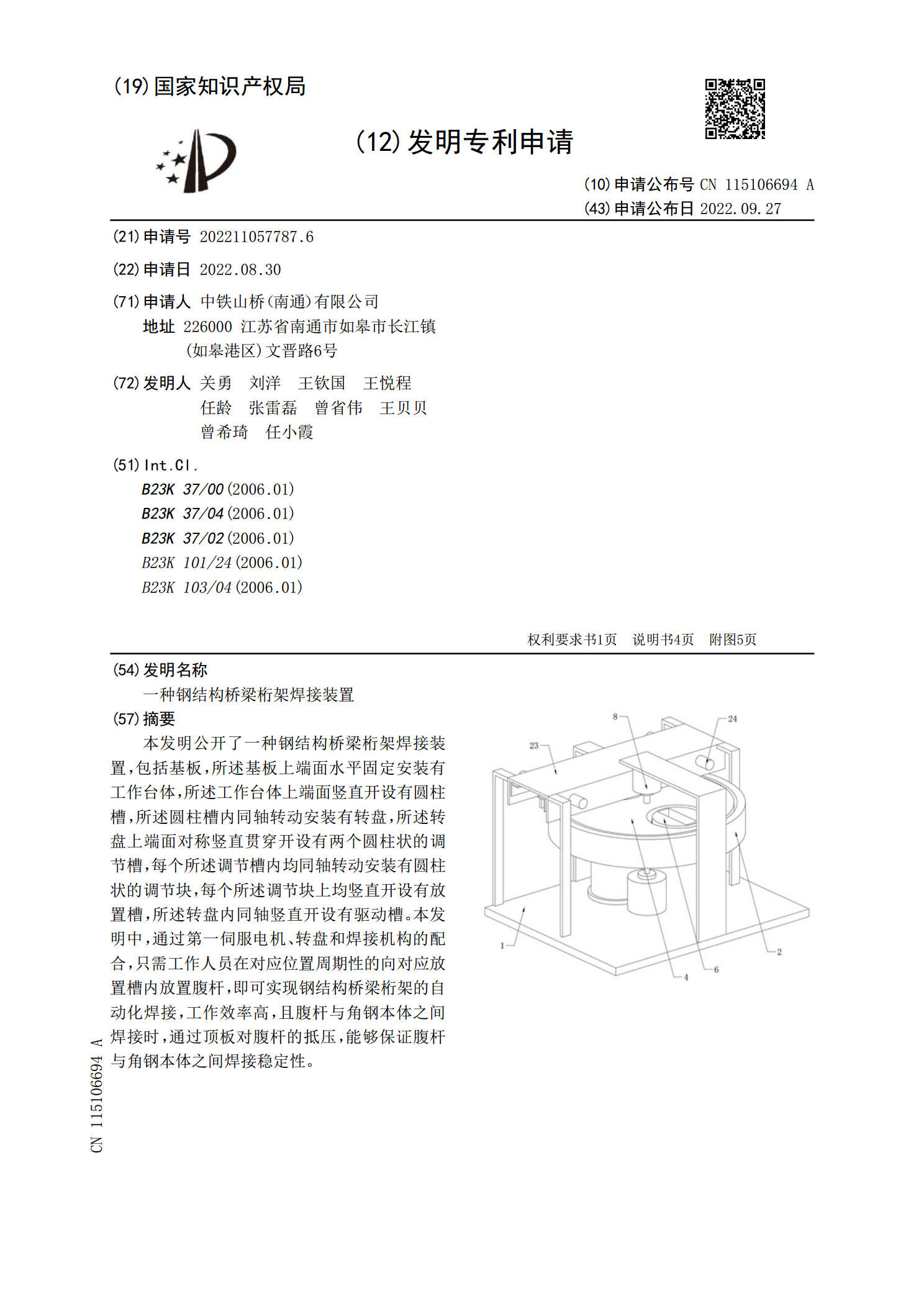
本发明公开了一种钢结构桥梁桁架焊接装置,包括基板,所述基板上端面水平固定安装有工作台体,所述工作台体上端面竖直开设有圆柱槽,所述圆柱槽内同轴转动安装有转盘,所述转盘上端面对称竖直贯穿开设有两个圆柱状的调节槽,每个所述调节槽内均同轴转动安装有圆柱状的调节块,每个所述调节块上均竖直开设有放置槽,所述转盘内同轴竖直开设有驱动槽。本发明中,通过第一伺服电机、转盘和焊接机构的配合,只需工作人员在对应位置周期性的向对应放置槽内放置腹杆,即可实现钢结构桥梁桁架的自动化焊接,工作效率高,且腹杆与角钢本体之间焊接时,通过顶

一种钢结构全自动焊接机器人.pdf
发明公开了一种钢结构全自动焊接机器人,涉及钢结构焊接技术领域,包括全自动焊接底座,所述全自动焊接底座沿横向设置有一组钢结构夹持机器人,所述全自动焊接底座沿纵向设置有一处位于钢结构夹持机器人中间的钢结构焊接机器人,所述全自动焊接底座的上表面设置有朝向且位于一组钢结构夹持机器人中间的第一红外距离传感器。发明为一种钢结构全自动焊接机器人,其用于焊接管状钢结构,可实现全过程中的自动焊接,不仅能够适用于不同型号的钢结构,所焊接的钢结构的表面更加均匀,而且整个过程焊接效率更高。

一种具有缓冲特性的钢结构桥梁桁架.pdf
本发明提供一种具有缓冲特性的钢结构桥梁桁架,包括桁架组件、滑块、连杆、弹性支架和支撑组件,两个桁架组件对立设置,其中桁架组件由至少两根工型钢对接组成,工型钢内活动安装有滑块,桁架组件由连杆连接,对立设置的桁架组件之间设有至少两个支撑组件,支撑组件内的支撑杆与位于上侧的工型钢固定连接,底座套设在支撑杆上并与位于下侧的工型钢固定连接,双向丝杆用于驱动摩擦片运动,而摩擦片用于夹住支撑杆。通过滑块和与其铰接连杆的设置,在位于下侧的桁架组件受到正拉力时滑块能够实现小幅度的位移,那么对刚性冲击进行缓冲,有效的消除了刚