
一种用于光伏电站的无人机巡检与缺陷定位系统及方法.pdf

海昌****姐淑

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于光伏电站的无人机巡检与缺陷定位系统及方法.pdf
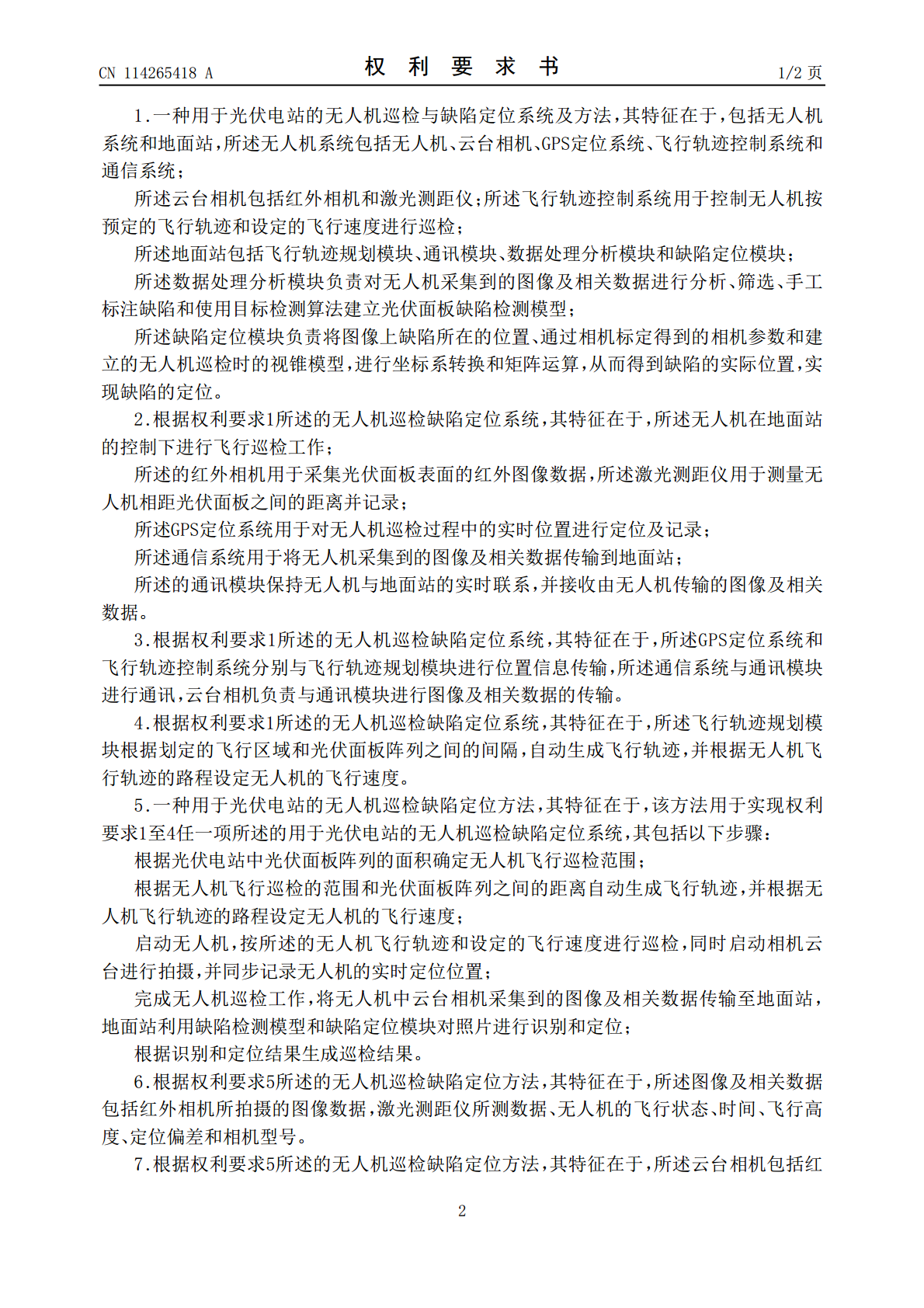
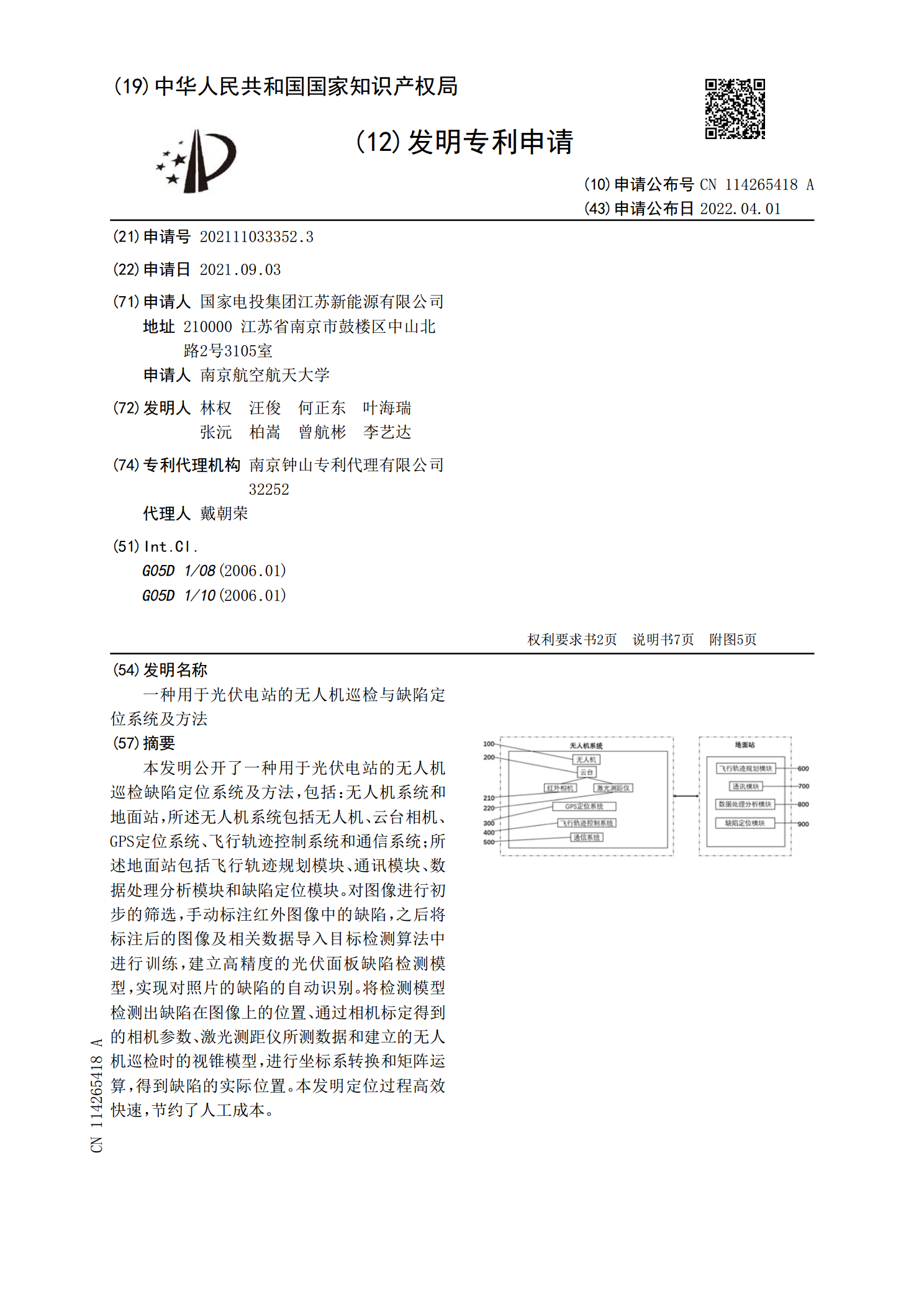
本发明公开了一种用于光伏电站的无人机巡检缺陷定位系统及方法,包括:无人机系统和地面站,所述无人机系统包括无人机、云台相机、GPS定位系统、飞行轨迹控制系统和通信系统;所述地面站包括飞行轨迹规划模块、通讯模块、数据处理分析模块和缺陷定位模块。对图像进行初步的筛选,手动标注红外图像中的缺陷,之后将标注后的图像及相关数据导入目标检测算法中进行训练,建立高精度的光伏面板缺陷检测模型,实现对照片的缺陷的自动识别。将检测模型检测出缺陷在图像上的位置、通过相机标定得到的相机参数、激光测距仪所测数据和建立的无人机巡检时的
一种光伏电站无人机巡检航线的规划方法及系统.pdf
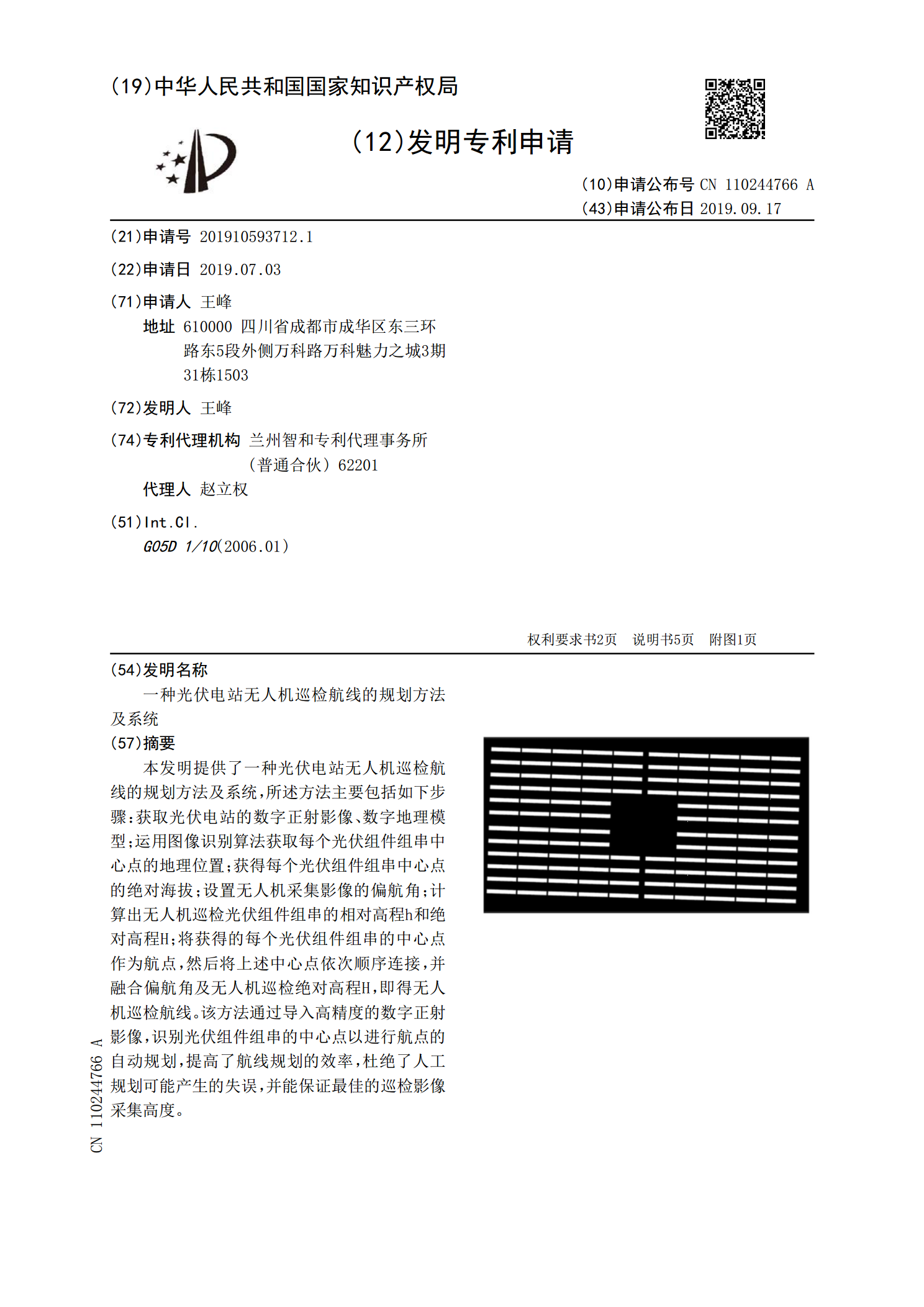
本发明提供了一种光伏电站无人机巡检航线的规划方法及系统,所述方法主要包括如下步骤:获取光伏电站的数字正射影像、数字地理模型;运用图像识别算法获取每个光伏组件组串中心点的地理位置;获得每个光伏组件组串中心点的绝对海拔;设置无人机采集影像的偏航角;计算出无人机巡检光伏组件组串的相对高程h和绝对高程H;将获得的每个光伏组件组串的中心点作为航点,然后将上述中心点依次顺序连接,并融合偏航角及无人机巡检绝对高程H,即得无人机巡检航线。该方法通过导入高精度的数字正射影像,识别光伏组件组串的中心点以进行航点的自动规划,提

一种光伏电站无人机智能巡检系统.pdf
本发明涉及智能巡检技术领域,尤其涉及一种光伏电站无人机智能巡检系统,包括:叶轮盖、叶轮、阻尼转轴、上壳、下壳、连接座、支架、连接臂、固定座、连接架、微特电机、摄像头、折叠架;所述上壳的底侧设置有下壳,且下壳通过螺栓与上壳相连接;所述下壳外壁的左右侧设置有阻尼转轴,且阻尼转轴通过支臂与下壳相连接;所述阻尼转轴的外壁下方设置有折叠架,且折叠架的一端通过活动连接与阻尼转轴相连接;所述折叠架的另一端设置有叶轮,且叶轮通过叶轮盖与折叠架相连接。本发明通过结构上的改进,具有巡检难度小,效率高,人工成本低,人身安全风险
用于光伏电站的光伏发电系统.pdf
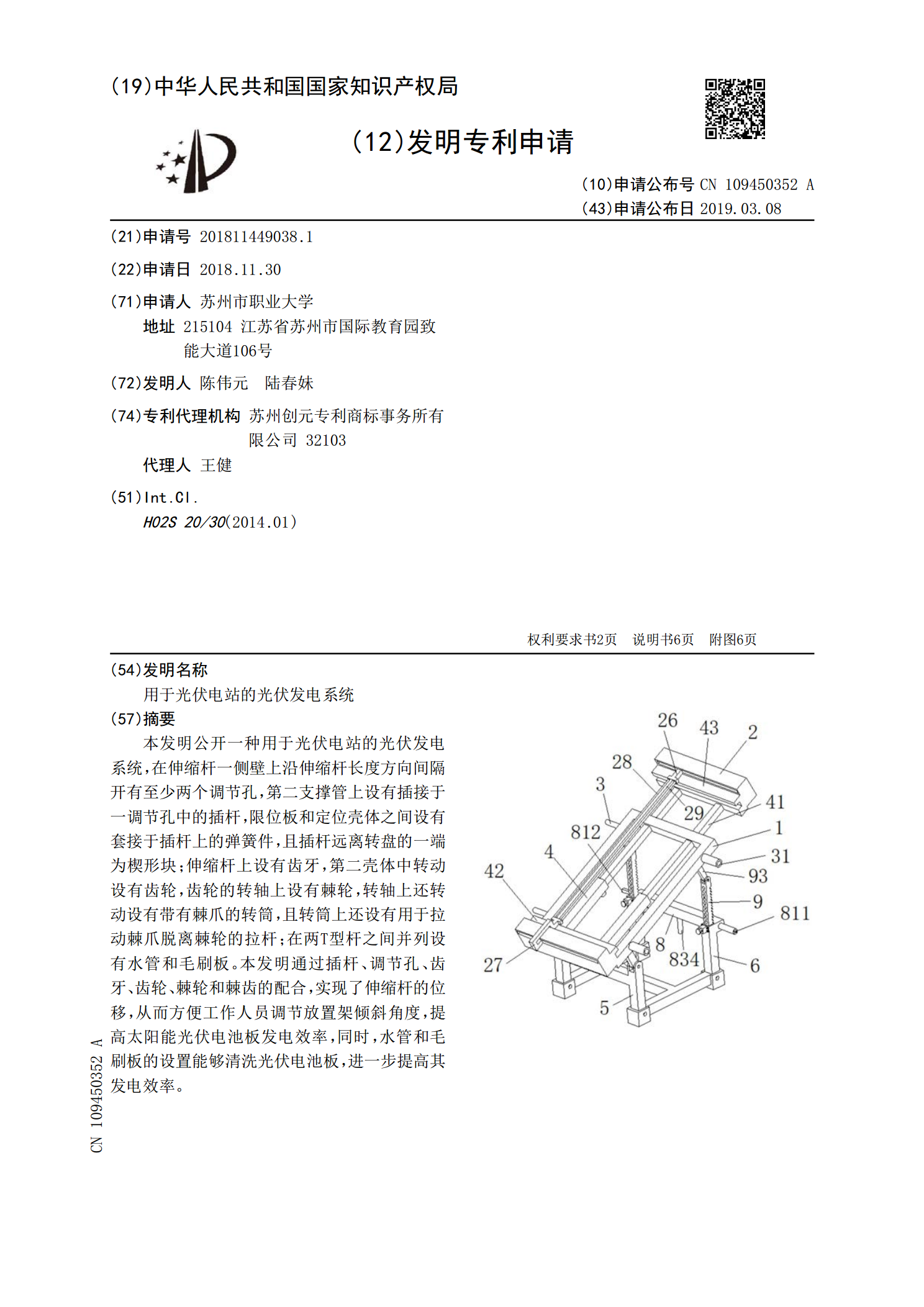
本发明公开一种用于光伏电站的光伏发电系统,在伸缩杆一侧壁上沿伸缩杆长度方向间隔开有至少两个调节孔,第二支撑管上设有插接于一调节孔中的插杆,限位板和定位壳体之间设有套接于插杆上的弹簧件,且插杆远离转盘的一端为楔形块;伸缩杆上设有齿牙,第二壳体中转动设有齿轮,齿轮的转轴上设有棘轮,转轴上还转动设有带有棘爪的转筒,且转筒上还设有用于拉动棘爪脱离棘轮的拉杆;在两T型杆之间并列设有水管和毛刷板。本发明通过插杆、调节孔、齿牙、齿轮、棘轮和棘齿的配合,实现了伸缩杆的位移,从而方便工作人员调节放置架倾斜角度,提高太阳能光
无人机太阳能光伏电站巡检应用.pdf
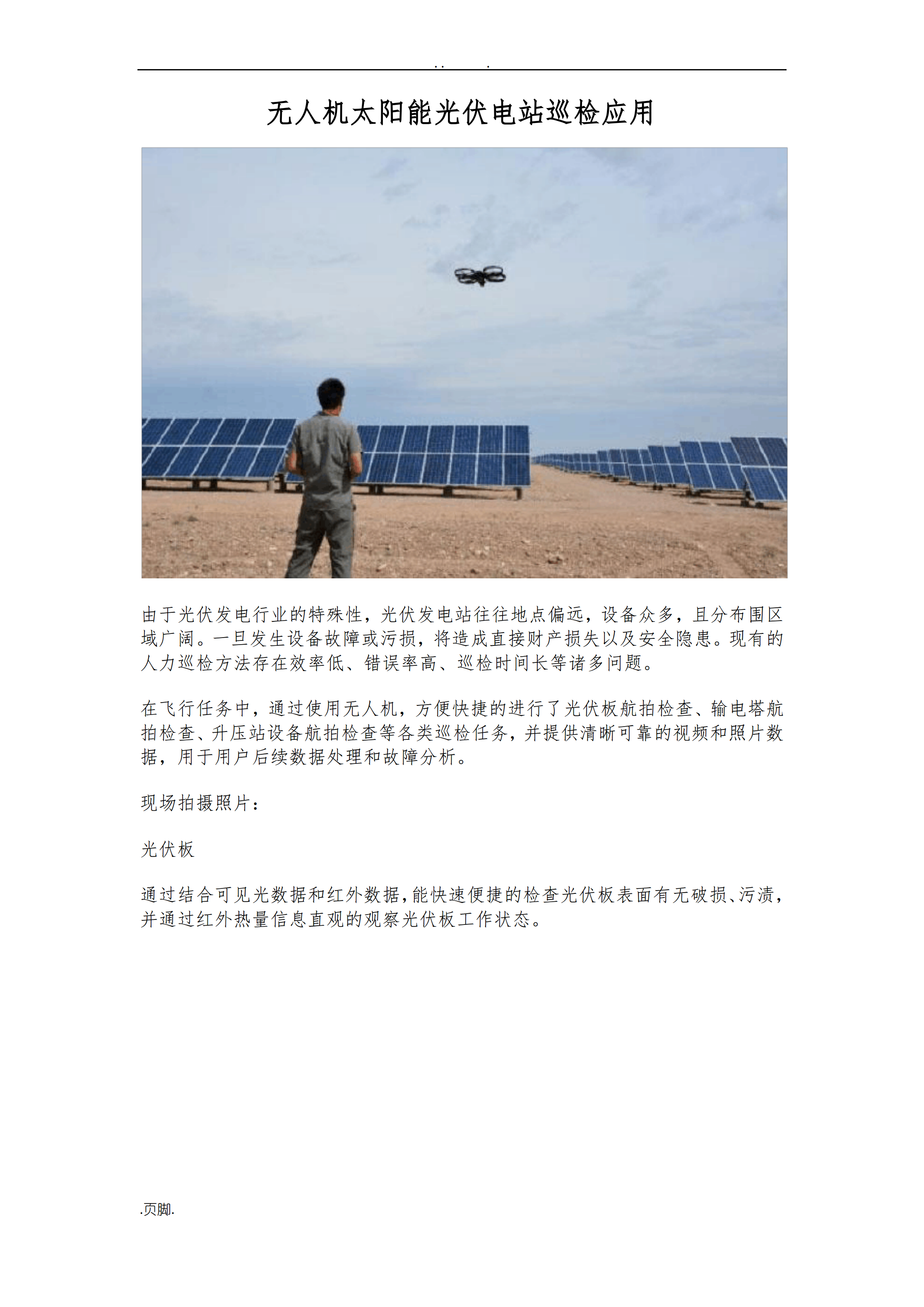
...无人机太阳能光伏电站巡检应用由于光伏发电行业的特殊性光伏发电站往往地点偏远设备众多且分布围区域广阔。一旦发生设备故障或污损将造成直接财产损失以及安全隐患。现有的人力巡检方法存在效率低、错误率高、巡检时间长等诸多问题。在飞行任务中通过使用无人机方便快捷的进行了光伏板航拍检查、输电塔航拍检查、升压站设备航拍检查等各类巡检任务并提供清晰可靠的视频和照片数据用于用户后续数据处理和故障分析。现场拍摄照片:光伏板通过结合可见