
一种光伏电站无人机智能巡检系统.pdf

东耀****哥哥

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种光伏电站无人机智能巡检系统.pdf
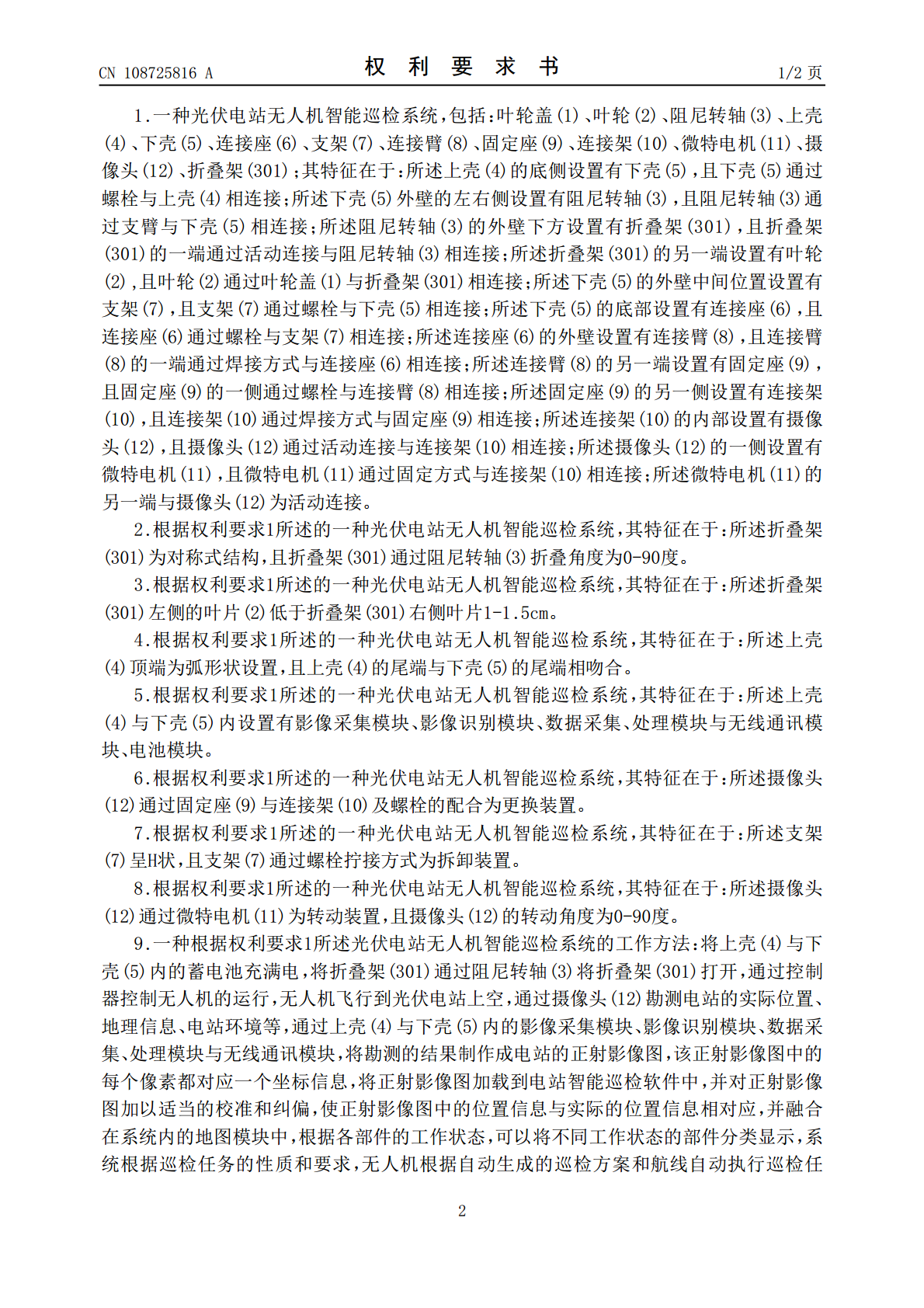
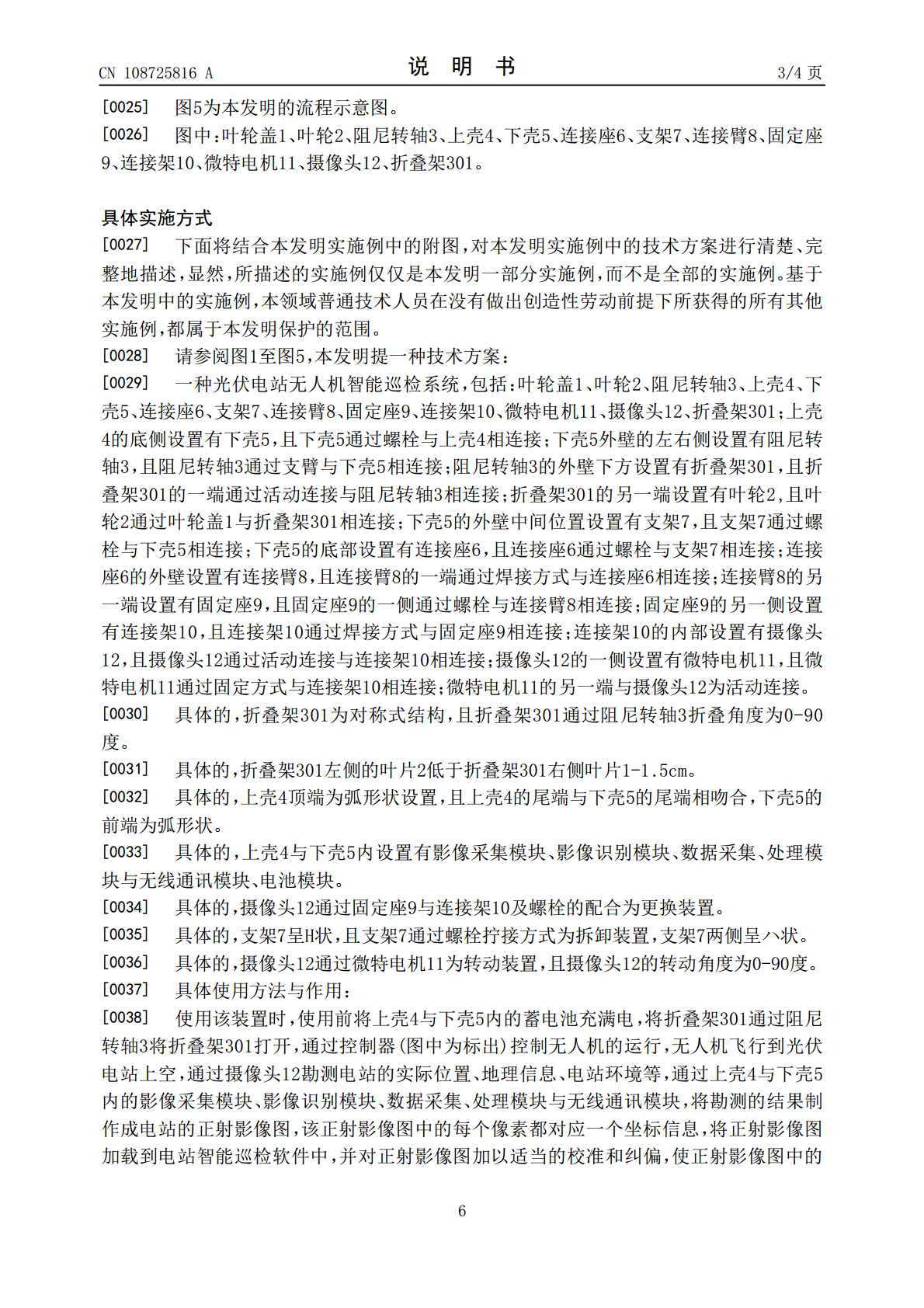
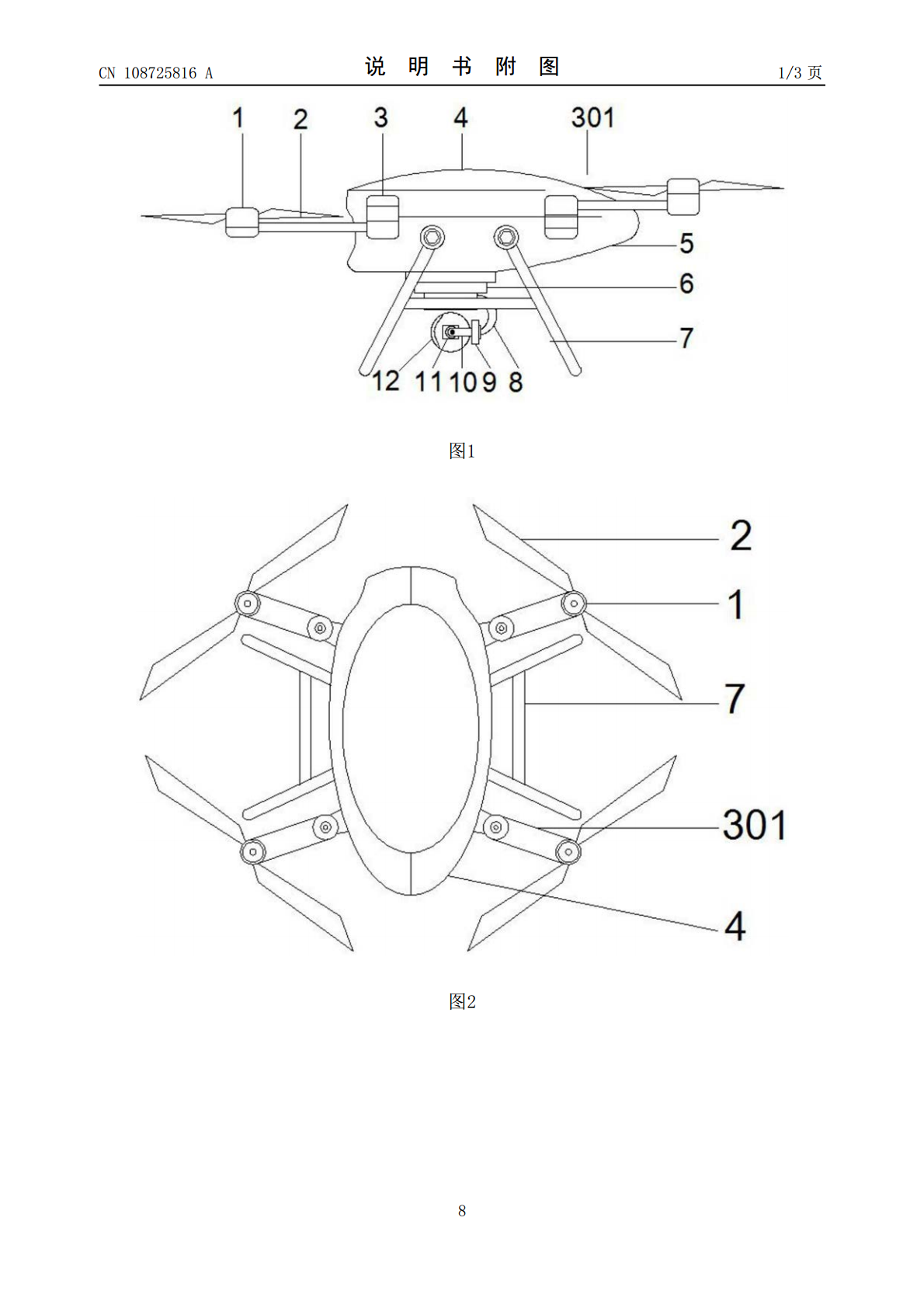
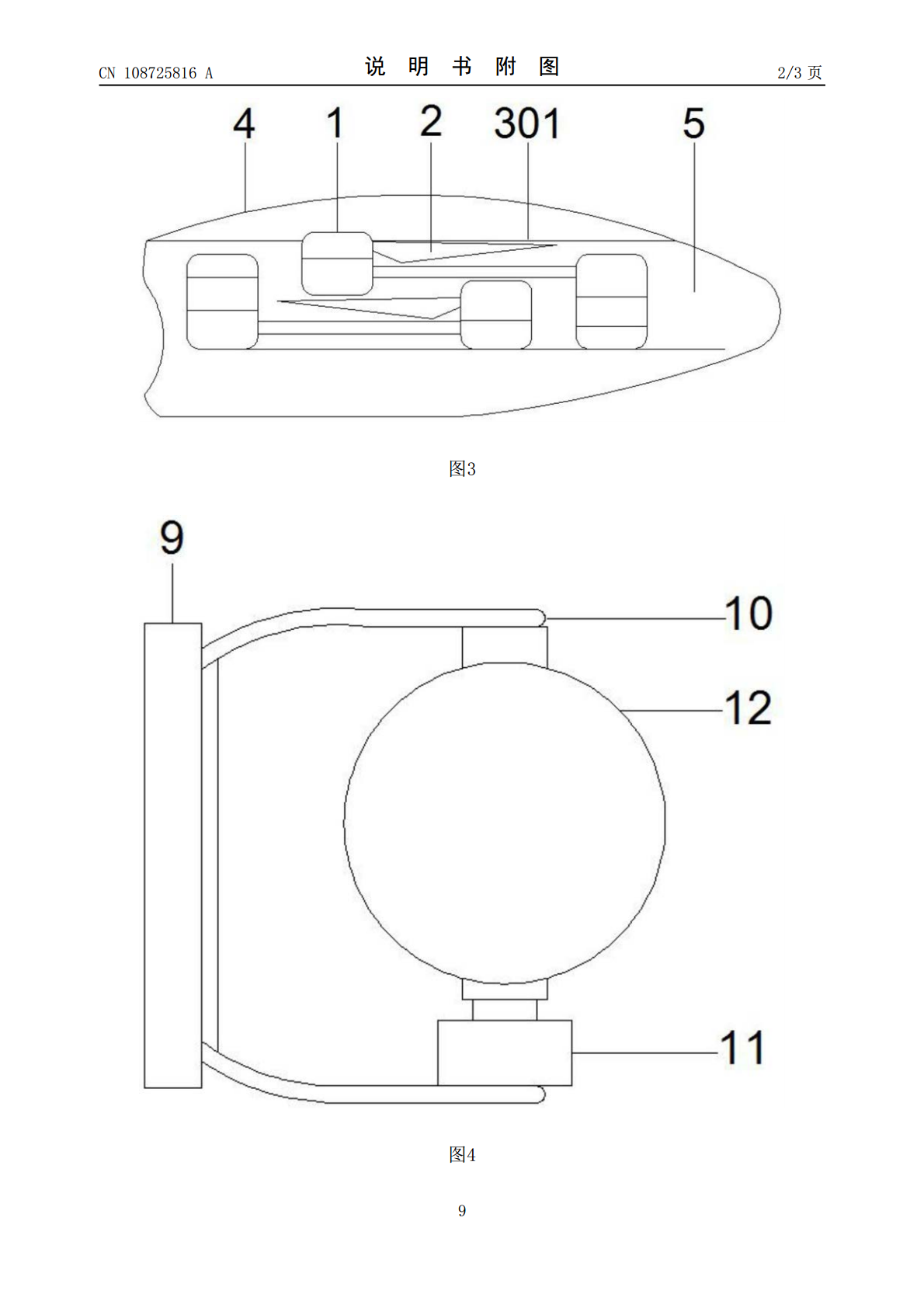
本发明涉及智能巡检技术领域,尤其涉及一种光伏电站无人机智能巡检系统,包括:叶轮盖、叶轮、阻尼转轴、上壳、下壳、连接座、支架、连接臂、固定座、连接架、微特电机、摄像头、折叠架;所述上壳的底侧设置有下壳,且下壳通过螺栓与上壳相连接;所述下壳外壁的左右侧设置有阻尼转轴,且阻尼转轴通过支臂与下壳相连接;所述阻尼转轴的外壁下方设置有折叠架,且折叠架的一端通过活动连接与阻尼转轴相连接;所述折叠架的另一端设置有叶轮,且叶轮通过叶轮盖与折叠架相连接。本发明通过结构上的改进,具有巡检难度小,效率高,人工成本低,人身安全风险
一种光伏电站无人机巡检航线的规划方法及系统.pdf
本发明提供了一种光伏电站无人机巡检航线的规划方法及系统,所述方法主要包括如下步骤:获取光伏电站的数字正射影像、数字地理模型;运用图像识别算法获取每个光伏组件组串中心点的地理位置;获得每个光伏组件组串中心点的绝对海拔;设置无人机采集影像的偏航角;计算出无人机巡检光伏组件组串的相对高程h和绝对高程H;将获得的每个光伏组件组串的中心点作为航点,然后将上述中心点依次顺序连接,并融合偏航角及无人机巡检绝对高程H,即得无人机巡检航线。该方法通过导入高精度的数字正射影像,识别光伏组件组串的中心点以进行航点的自动规划,提
一种光伏发电站智能巡检设备.pdf
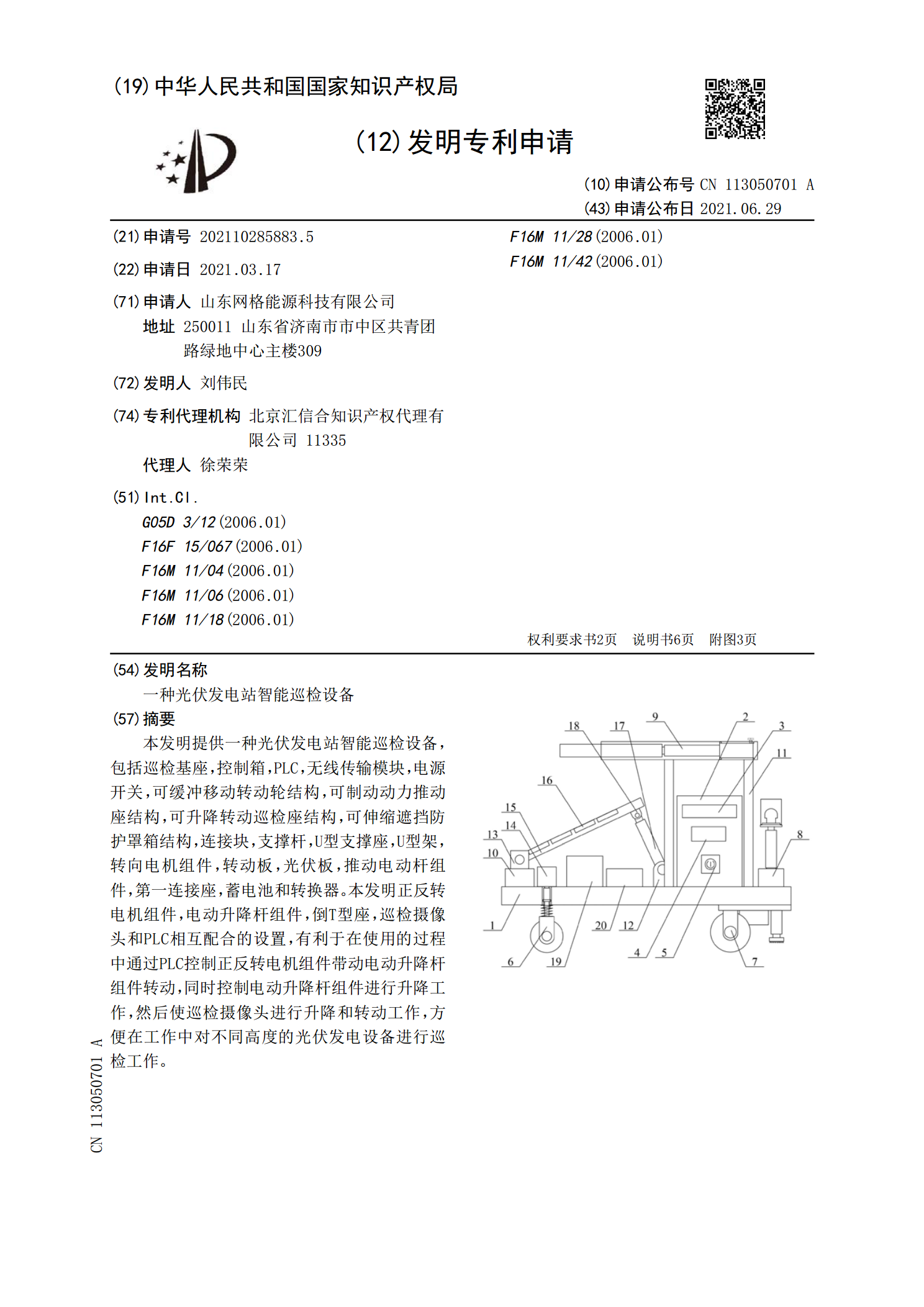
本发明提供一种光伏发电站智能巡检设备,包括巡检基座,控制箱,PLC,无线传输模块,电源开关,可缓冲移动转动轮结构,可制动动力推动座结构,可升降转动巡检座结构,可伸缩遮挡防护罩箱结构,连接块,支撑杆,U型支撑座,U型架,转向电机组件,转动板,光伏板,推动电动杆组件,第一连接座,蓄电池和转换器。本发明正反转电机组件,电动升降杆组件,倒T型座,巡检摄像头和PLC相互配合的设置,有利于在使用的过程中通过PLC控制正反转电机组件带动电动升降杆组件转动,同时控制电动升降杆组件进行升降工作,然后使巡检摄像头进行升降和转
无人机太阳能光伏电站巡检应用.pdf
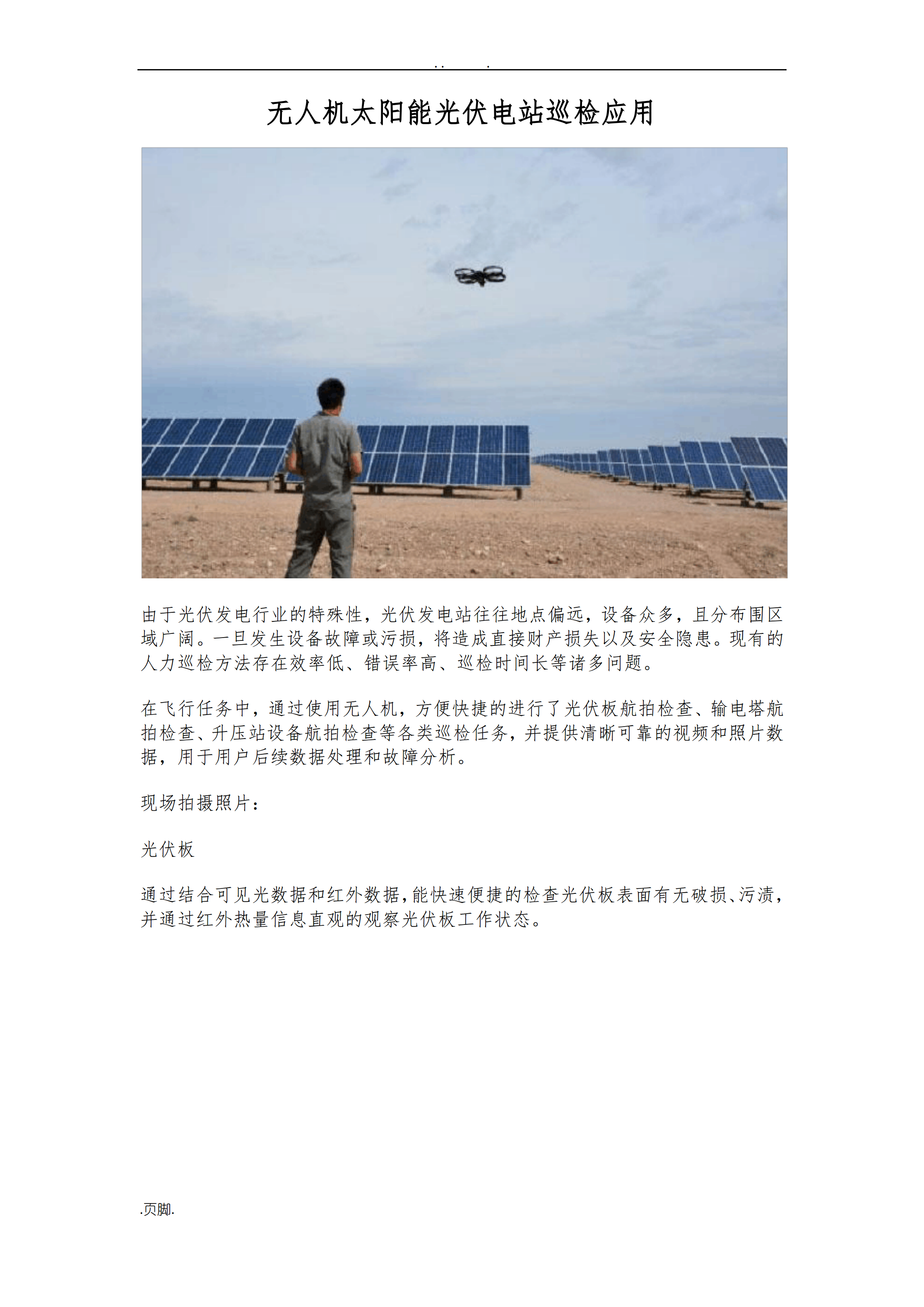
...无人机太阳能光伏电站巡检应用由于光伏发电行业的特殊性光伏发电站往往地点偏远设备众多且分布围区域广阔。一旦发生设备故障或污损将造成直接财产损失以及安全隐患。现有的人力巡检方法存在效率低、错误率高、巡检时间长等诸多问题。在飞行任务中通过使用无人机方便快捷的进行了光伏板航拍检查、输电塔航拍检查、升压站设备航拍检查等各类巡检任务并提供清晰可靠的视频和照片数据用于用户后续数据处理和故障分析。现场拍摄照片:光伏板通过结合可见

光伏电站无人机巡检技术白皮书.pdf
光伏电站无人机巡检技术白皮书一、前言随着人们对可再生能源的需求不断增长,光伏电站作为清洁能源的重要组成部分,得到了广泛的推广和应用。然而,由于光伏电站通常建设在偏远地区或山区,地理环境复杂,且光伏组件长期暴露在外,容易受到恶劣天气和外界环境影响,进而影响光伏组件的发电效率。对光伏电站的定期巡检显得尤为重要。二、传统光伏电站巡检存在的问题1.传统的光伏电站巡检主要依靠人工,存在巡检范围广、效率低和安全风险高等问题。2.人工巡检不易及时发现隐患,容易造成电站故障,影响发电效率。3.传统巡检方式需要大量人力物力